
|
|
|
Главная страница Цифровые системы [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [ 27 ] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] 4.7.5. Асинхронные и синхронные двигатели Двигатели переменного тока (а.с. motor), как правило, применяются в тяжелы); эксплуатационных условиях, однако они находят все большее распространение в си-стемах промышленного управления, например в качестве сервомоторов. Некоторые преимущества двигателей переменного тока перечислены ниже: - экономичность; - надежная и простая конструкция; - высокая эксплуатационная надежность; - простое энергопитание; - отсутствие коммутатора; - практическое отсутствие дуговых явлений (поскольку нет коммутаторов). Отрицательными чертами двигателей переменного тока являются более низкий момент трогания, чем у двигателей постоянного тока, и более сложные цепи управления. Однако преимущества систем привода переменного тока таковы, что они успешно конкурируют с двигателями постоянного тока в роботах, манипуляторах и других промышленных системах силового привода. Широкое применение двигателей переменного тока в качестве сервомоторов стало возможным по мере развития силовой электроники в сочетании с новыми методами управления. Применение микроэлектроники обеспечивает вполне приемлемое управление частотой питающего напряжения. Вращающий момент двигателя нельзя измерить так же просто, как у двигателей постоянного тока, однако существуют способы его оперативной (on-line) оценки. Из-за жестких временных требований для управления должны использоваться микропроцессоры со специальной архитектурой, обеспечивающей очень высокую скорость вычислений, - цифровые сигнальные процессоры (Digital Signal Processors - DSP). У асинхронного (индукционного) двигателя магнитное поле статора не постоянно, в отличие от двигателя постоянного тока. В простейшей (двухполюсной) машине имеются три статорные обмотки, расположенные вокруг статора под углом 120° дрУ относительно друга. Когда по ним подается трехфазное переменное напряжение, результирующий магнитный поток статора вращается с частотой приложенного напр жения. Поскольку к обмотке ротора не подводится никакого внешнего питания (она короткозамкнута), то нет необходимости в щеточных коммутирующих устройствах. Вращающееся поле статора пересекает обмотки ротора и индуцирует в них ток Результирующий поток ротора взаимодействует с вращающимся потоком статора и создает вращающий момент в направлении вращения поля статора. Этот момент » есть рабочий момент двигателя. Из-за потерь на трение ротор не может даже на холостом ходу достичь так называемой синхронной частоты вращения, т. е. точного зна чения частоты вращения поля статора. Вращающий момент образуется именно из-з» разности частот вращения ротора и поля статора. Относительная разность частот вращения называется скольжением ротора (slip) Щ - W,n где со, - частота вращения поля статора (синхронная частота), а w, - частота враШС ния ротора. Очевидно, что при 5 = 0 вращающий момент равен нулю. Ротор синхронного двигателя движется синхронно с вращающимся магнитным по-создаваемым обмотками статора (статор синхронного двигателя в принципе такой laK V асинхронного). В отличие от асинхронного, обмотки ротора синхронного дви-дтетя возбуждаются от внешнего источника постоянного тока. Полюса возникающего шгнитного поля ротора занимают фиксированное положение относительно вращающегося поля статора и вращаются вместе с ним; следовательно, скорости вращения поля статора и ротора идентичны и скольжение равно нулю. Синхронные двигатели часто используются в тех случаях, когда необходима постоянная скорость вращения при переменной нагрузке. В сочетании с современными преобразователями частоты синхронные двигатели могут работать с переменной скоростью вращения. Большое распространение приобретают синхронные двигатели с постоянными магнитами. Шаговые двигатели можно рассматривать как специальный тип синхронного двигателя. 4.8. Управляющие клапаны Управляющий клапан (control valve) состоит из тела клиновидной или цилиндрической формы (иногда называется тарелкой), закрепленного на стержне (штоке), который движется вверх и вниз относительно цилиндрического седла. Стержень обычно перемешается под давлением сжатого воздуха на поршень или диафрагму с пружиной. Пружина может либо открывать, либо закрывать клапан в зависимости от того, какое положение требуется в случае прекращения подачи сжатого воздуха. Иногда для управления потоком используется электрический или гидравлический привод. Конструкции тела и седла клапана различаются в зависимости от требований к соотношению между производительностью и потерями напора на клапане, типа жидкости и расхода при разных положениях штока. Размер клапана обычно выбирают в соответствии с параметрами трубопровода, в котором он устанавливается. Выбор формы клапана и сочетания размеров седла и гела (тарелки) требует оценки следующих факторов. Потери напора (pressure drop). Большие потери напора на клапане могут затруднить движение штока. Специальная конструкция клапана заставляет поток двигаться в противоположных направлениях через два запирающих элемента, тем самым уравновешивая силы. Необходимость снижения потерь напора может потребовать применения различных типов клапанов, например типа "бабочка" (butterfly valve). Максимальный расход (maximum flowrate). Это требование сводится к сочетанию максимального расчетного расхода с максимальной зоной управления. Последняя должна в идеале составлять 30-50 % от расчетного расхода. Иногда неопытные специалисты задают эту величину на уровне 10 %, что заметно ухудшает рабочие характеристики. Управляемость (rangeability). Это отношение расходов при двух различных положениях штока. Оно в основном связано с конструкцией тела и седла и зависимостью потерь напора от расходных характеристик, которые, в свою очередь, связаны характеристиками нагнетающего насоса. Управляемость должна обеспечивать Номинальный диапазон расходов с соответствующими зонами управления (жела- ельно 30-50 %) по обе стороны диапазона. Увствительность (seiisitivity). Связана с управляемостью и величиной управля-ОЩего воздействия, необходимого для управления с заданной точностью. Иногда Глава 4. Вход и выход физических процц пчение большой клапан обеспечивает номинальный расход, а малый, установленные раллельно, обеспечивает необходимую чувствительность. • Линейность (linearity). Желательно, чтобы в контуре управления существовала нейная зависимость между выходами регулятора и датчика, т. е. в цепочке \ пан - процесс - датчик". Если контур управления не обладает линейной зависи)! стью выходных и входных величин, ее можно обеспечить выбором характериг ° клапана, а иногда и датчика. Качество управления при отсутствии линейности жет оказаться низким, или потребуется реализация специальных способов ynpj" ления. • Гистерезис (hysteresis). Это обычная проблема управляющих клапанов, возникаю щая из-за процессов сухого трения (прилипания) в месте прилегания запорного эле-мента клапана к седлу, а также потерь напора на клапане. Как правило, гистерезис является причиной небольших постоянных колебаний в контуре управления, для борьбы с которыми можно применять устройства точного позиционирования клапана. Это специальное устройство управления с большим коэффициентом усиления которое обеспечивает нужное положение штока клапана. В этом случае управляющий компьютер не осуществляет точного контроля за открытием клапана, а только вырабатывает опорные значения для устройства позиционирования клапана. расход/ максимальный расход 0.8 0.7 0.6 0.5 0.4 соответствующая квадратному корню 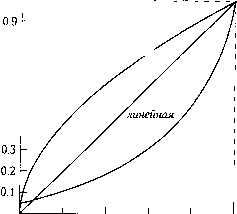 равного процентного отношения О 20 40 60 80 100 степень открытия клапана,/> (положение штока) Рис. 4.34. Характеристики клапанов Управляемость клапана можно определить на основании расчета двух расхоДОВ равных, например, 15 и 85 % от максимального расхода. В этом случае необходим" знать функцию/(х), которая характеризует клапан. Клапаны поставляются со след} ющими характеристиками: f(x) = x - линейная, f(x) = л[х - соответствующая квадратному корню, f(x) = Л- - равного процентного отношения (где конструктивная постоянная А обычно лежит в пределах от 20 до 50). имости показаны на рис. 4.34. Следует отметить, что идеальный клапан Эт» оцентного отношения не закрывается полностью. На практике их проек- равного ц5разом, чтобы получить линейную характеристику при очень малых тнр}* следовательно, они закрываются полностью, открытиях- и, 4 9. Заключение рменные физических процессов измеряются аналоговыми, цифровыми или ными датчиками. Тип выходного сигнала датчика - аналоговый, бинарный, ""тедовательность импульсов - должен выбираться в зависимости от приложения и характера управления. Каждый датчик должен удовлетворять разнообразным требованиям, например: выход должен линейно зависеть от измеряемой величины; выходной сигнал должен иметь достаточно высокий уровень; - сам датчик не должен искажать измеряемую величину; - датчик должен иметь низкое потребление мощности; - датчик должен быть нечувствителен к внешним воздействиям и помехам; - выходной сигнал датчика должен быть одним и тем же при фиксированном значении измеряемой величины и не зависеть от предыдущих измерений; соответственно, измеренное значение должно однозначно определяться по выходному сигналу датчика; - датчик должен иметь адекватное время установления для правильного воспроизводства переходных процессов. В главе были рассмотрены несколько примеров датчиков для аналоговых физических величин и для бинарных состояний. Для качественной передачи сигналов по линиям связи необходимо согласование уровней сигналов и импедансов, чтобы исключить нагрузочные эффекты и использовать полный измерительный диапазон соответствующих устройств. Были описаны важнейшие причины наводок и помех на электрических линиях связи: резистивная связь; емкостная связь; - индуктивная (магнитная) связь. Рассмотрены основные способы подавления помех или уменьшения их влияния: ~ экранирование и заземление; ~ гальваническая развязка; ~ применение витых проводов; раздельная прокладка силовых и сигнальных кабелей; ~ сигнальное заземление. а и передачи измерительной информации предпочтительнее использовать ток, Мен ""Р*"ие, из-за чувствительности последнего к внешним помехам. Ток при-ЧИя v, промышленных системах управления для передачи на большие расстоя-Чаи збежание многих проблем, связанных с электрическими наводками, все "спользуются оптические сигналы. Исполнительные механизмы - это устройства, механически воздействуй физические процессы путем преобразования электрических сигналов в ipeg" управляющее воздействие. Аналогично датчикам, исполнительные механизм жны быть подобраны соответствующим образом для каждой задачи. Испопн* ные механизмы могут быть бинарными, дискретными или аналоговыми; конк тип для каждой задачи выбирается с учетом необходимой выходной мощностт. стродействия. В главе также рассмотрено электромеханическое преобраз энергии с помощью двигателей постоянного тока, асинхронных, синхронных и вых двигателей. Многие исполнительные механизмы сами по себе являются г"* мами управления, т. е. включают в себя контуры регулирования своих параметров основе управляющего сигнала от внешней системы управления; некоторые серщ ханизмы, изменяющие скорость и позиционирование, включают в себя и элемещ управления этими параметрами. В других случаях контур регулирования мох? быть реализован управляющим компьютером. Рекомендации по дальнейшему чтению Хороших книг, посвященных общим вопросам измерений и инструментально; техники, совсем немало. [Doebelin, 1990] представляет собой выдающийся справоч ник, содержащий детальное описание большинства типов датчиков. Необходимоот-метить также [Alloca/Stuart, 1984] и [Barney, 1988]. Прекрасным учебником по применению датчиков и исполнительных механизмо; в компьютерных системах управления является [de Silva, 1989]. В книге [Derenzt 1990] описаны некоторые вводные упражнения по интерфейсу с компьютерами и № держится прекрасный перечень литературы по предмету. [Sargent/Shoefflaker, 199) давно стала классическим трудом по программным и аппаратным интерфейсам д.1* персональных компьютеров и может быть рекомендована всем, кто использует ко» пьютер не только как универсальный игральный автомат, усовершенствованную пв шущую машинку или средство для блуждания в Интернете. Измерение сил описано в [Norton, 1989], а датчики, работающие по принципу Kt риолиса, вкниге [Vogtlin/Tschabold, 1990]. В [Pessen, 1989] дан хороший обзорэл» трических и пневматических бинарных датчиков, исполнительных механизмов схем; этот учебник содержит также несколько полезных ссылок на работы в данн области. Фотоэлектрические датчики подробно рассмотрены в [Juds, 1988]. Исполнительные механизмы сами по себе представляют целую науку. [Р" gerald/Kingsley/Umans, 1990] является стандартной книгой по электрическим шинам. В [Leonhard, 1985] дается более углубленный материал по управлению сис мами электропривода, а [Kenjo/Sugawara, 1994] является основным источнико! шаговым двигателям. Как современное и глубокое руководство по силовой элеК V нике и ее применению для управления двигателями можно рекомендовать кИ [Mohan/Undeland/Robbins, 1995]. Операционные усилители являются настолько важными элементами цепей. . равления, что существует огромное количество специальной литературы по э" теме. Среди других следует упомянуть книги [Glasford, 1986], [Hufault, 1986], [Ir"; 1994] и [Jones, 1986]. Техника использования заземлений и экранирования оп« в [Morrison, 1986] и [Ott, 1988]. [Wilson/Hawkes, 1989] дает обширный обзор пр* нения оптоэлектропики. Обработка сигналов Дискретизация сигналов. Преобразование аналоговых и цифровых сигналов. Обработка измерительной информации Обзор В главе 4 были рассмотрены методы генерации датчиками сигналов измеритель-ой информации и их передачи в аналоговом виде по проводникам. Настоящая глава посвящена технологии ввода собранных данных в управляющий компьютер и их обработке. Различные компоненты входного и выходного интерфейсов компьютера рассматриваются в разделе 5.1. Ключевым вопросом этой главы является оцифровка (дискретизация, квантование) сигналов, т. е. представление аналоговых сигналов, которые как таковые не могут быть обработаны компьютером, в виде последовательности значений в дискретные моменты времени. Обсуждаются применяемые для этого устройства - схемы выборки и хранения и мультиплексоры. Преобразование аналоговых сигналов в цифровые (АЦ-преобразование) и цифровых сигналов в аналоговые (ЦА-преобразование) - основная задача интерфейса компьютера с датчиками и исполнительными механизмами. Это тема раздела 5.2. Прежде чем оцифровывать аналоговый сигнал, необходимо убедиться, что он содержит только частоты, непосредственно относящиеся к измерению, и что все посторонние или нежелательные частотные составляющие, например высокочастотные шумы, исключены или подавлены. Для этой цели используются аналоговые фильтры, рассмотренные в разделе 5.3. Для извлечения из сигнала полезной информации после АЦ-преобразования используются цифровые фильтры (раздел 5.4). С помощью цифровой фильтрации можно уменьшить посторонние составляющие входного сигнала. Чтобы обеспечить качество и правильность измерительной информации, после АЦ-преобразования обходимо провести ряд предварительных проверок. Наиболее важные из них обсуждаются в разделе 5.5. Дискретизация аналоговых сигналов 1 Ввод аналоговых сигналов в компьютер nni.-ьные компоненты входного и выходного интерфейсов компьютера з=1нынарис. 5.1. "Их Ьфаботанный датчиком, должен быть отфильтрован от всех посторон- Уст ДО того, как он будет обработан компьютером. В частности, необходимо счгц высокочастотный шум, который обычно наводится в кабеле при передаче То фильтрованные измерительные сигналы собираются в мультиплексоре. MyjPOHCTBo, которое имеет несколько входов и один выход. Основное назначение Од "плексора - уменьшить общую стоимость системы за счет применения только Го устройства обработки (в данном случае - управляющего компьютера), кото- [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [ 27 ] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] 0.0133 |