
|
|
|
Главная страница Цифровые системы [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [ 21 ] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] - ускорение; - удар. Каждая из этих величин является производной по времени от предшествующе Теоретически можно измерить только одну из них и затем получить остальные диф! ференцированием или интегрированием. На практике, однако, такой подход непри-емлем из-за природы сигнала (постоянный, переходный и т. д.), частотного спектра шумов и возможностей средств обработки данных. Контроль параметров движения обязателен для приложений, в которых исполь-зуется механическое оборудование - сервосистемы, роботы, электроприводы или другие манипуляторы. Измерение перемещений применяется при управлении положением клапанов. Толщина пластин в прокатном стане постоянно контролируется системой управления калибровкой. Датчики деформаций - это устройства, которые измеряют механическое напряжение, давление и силу, но могут применяться и для измерения перемещений. В системах мониторинга состояния и предупреждения отказов механического оборудования широко используются акселерометры. Для измерения параметров движения применяются следующие типы устройств: - потенциометры для измерения перемещений; они работают как переменные резисторы; - датчики на основе принципа электромагнитной индукции, например дифференциальные трансформаторы, резольверы, синхротрансформаторы (сельсины); - емкостные датчики для измерения малых перемещений, вращений и уровней жидкости; - пьезоэлектрические датчики для измерения давления, напряжения, ускорения, скорости, силы и момента (пьезоэлектрический материал деформируется под действием приложенной разности потенциалов или вырабатывает разность потенциалов при механическом воздействии); - лазерные датчики для точного измерения малых перемещений; - ультразвуковые датчики для измерения расстояний в медицинских прибораХ; системах автофокусировки фото- и телекамер, измерения уровня и скорости Пример 4.2 Резольвер Резольверы (resolver) применяются в приложениях, где требуется очень точное измерение угловых перемещений и скорости, например в сервосистемах и роботах. Выходной сигнал резольвера - это мера углового перемещения; дифференцирование этого сигнала дает угловую скорость. Резольвер работает на принципе измерения взаимоиндукции между двумя обмотками (рис. 4.11)-Ротор резольвера соединен с вращающимся объектом. На первичную обмотку ротора подается переменное напряжение v,.gf. Статор состоит из двух обмоток, развернутых на 90° друг относительно друга. Напряжение на этих обмотках соответственно,где 0 - угловое положение ротора. обмотки статора 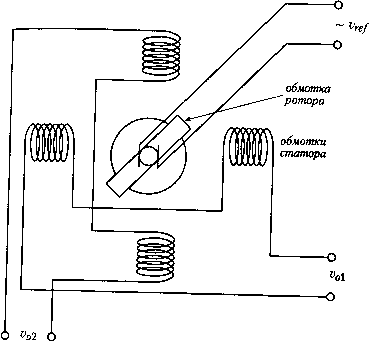 Рис. 4.11. Принцип работы резольвера Можно сказать, что выходные напряжения и представляют собой напряжение v,.f, промодулированное величиной угла G . Используя одно из выходных напряжений, можно однозначно измерить углы лишь в диапазоне 0-90°, оба сигнала позволяют однозначно измерять углы от 0° до 360°. Выход резольвера есть тригонометрическая функция угла. Эта нелинейность, однако, не всегда является недостатком. Например, при управлении вращающими моментами в роботах требуются именно тригонометрические функции углов поворота. Поэтому выходной сигнал резольвера можно непосредственно использовать для управления без дополнительного преобразования в реальном времени, которое увеличило бы загрузку управляющего компьютера. Обычно резольвер дает хорошее разрешение и высокую точность. Он имеет высокий уровень выходного сигнала и низкий выходной импеданс. Полоса пропускания резольвера зависит от частоты источника напряжения. Проблемы при работе резольвера могут возникать только из-за щеток ротора (износ. Дополнительные шумы и механические нагрузки). Резольверы поставляются ВДеполнофункциональных автономных устройств. измерение линейных и угловых скоростей имеет фундаментальное значение /"одов и робототехники. Интепесным приложением гы.-..-------- "СИп~- явл;:РГ°----и. Интересным приложением си™ изм рТ™;; •яется управление активной подвеской транспортных средст ™ Пример4.3 Тахометр Тахометр представляет собой генератор постоянного тока с постоянными магнитами, применяемый для измерения угловой скорости. Принцип его действия иллюстрируется рис. 4.12. 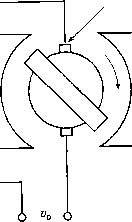 коммутатор Рис. 4.12. Принцип работы тахометра постоянного тока Магниты создают постоянное однородное магнитное поле. Движение проводника в поле индуцирует напряжение, пропорциональное скорости его вращения. Ротор непосредственно соединен с объектом, скорость вращения которого измеряется. Выходное напряжение, генерируемое в процессе вращения, снимается коллектором, который состоит из пары угольных щеток с низким сопротивлением. Тахометр обычно создает очень маленькую дополнительную механическую нагрузку для больших валов, на которые он устанавливается. Анализируя динамику тахометра, можно утверждать, что его частотный диапазон обычно значительно шире, чем у механического двигателя при его нормальной нагрузке. Поэтому индуктивность и другие электромагнитные параметры тахометра обычно не влияют на результаты измерения. 4.4.2. Датчики силы, момента и давления Многие типы датчиков силы/момента (force/torque) основаны на измерений? формаций. Датчики для измерения деформаций называются тензодатчиками (5 gauge). Принцип действия таких датчиков - изменение электрического сопротив ния в образце, который подвергается воздействию внешних сил (пьезорезистивнь эффект). Относительное изменение сопротивления как функция действующей датчик силы зависит от используемого материала: у полупроводникового дат" оно на 1-2 порядка больше, чем у металлического. Чувствительный элементу n-, проводникового датчика выполнен из монокристалла пьезорезистивного матер" Дополнительное преимущество полупроводниковых тензодатчиков - более вЫС" удельное сопротивление по сравнению с металлическими и, соответственно, меньшее потребление мощности и выделение тепла. Измерение моментов и сил необходимо во многих задачах, включая управление . точным движением (например, перемещения и захваты в робототехнике) и передаваемой механической мощностью в двигателях и системах привода. Момент можно измерить либо на основе напряжений, возникающих в материале, либо на основе деформации (прогиба). Измеряя угол скручивания оси датчиком углового перемещения, можно определить приложенный момент. В примере 3.5 было показано, что момент двигателя постоянного тока пропорционален току ротора, т. е. непрямое измерение момента можно выполнить по величине тока. Давление можно измерить по соответствующей механической деформации, например по изгибу трубки или отклонению мембраны. Мембрана присоединяется к кристаллу кварца, электроду конденсатора или дифференциальному трансформатору (рис. 4.13). Благодаря пьезоэлектрическому эффекту деформированный кварцевый кристалл генерирует разность потенциалов. Изменение емкости конденсатора, присоединенного к мембране, можно измерить каким-либо электрическим методом. Выходной электрический сигнал в обоих случаях связан с приложенным усилием и деформацией измерительной головки. ервичная омотка подвижный ферромагнитный сердечник - *-* вторичная обмотка Фференциальный "Ртсформатор давление мембрана 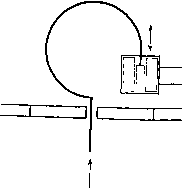 дифференциальный трансформатор У out давление перемещение З. Принципы измерения давления г1ол?"ФРенциальный трансформатор (differential transformer) - это датчик, ис-Рдеч измерения перемещений. Обычно он состоит из ферромагнитного *тся Движущегося внутри двух обмоток трансформатора. Одна обмотка пи-Нь! /ременным током, а со второй снимается выходной сигнал. Обмотки соеди-•им образом, чтобы в нейтральном положении сердечника выходное напря- Глава 4. Вход и выход физических процессов дналоговые датчики жение было равно нулю. Любое перемещение сердечника пропорционально измеця. ет выходное напряжение. Измерение давления используется для определения других величин. Например по давлению на дне заполненного жидкостью сосуда можно определить ее уровещ 4.4.3. Датчики приближения Изменение электрических свойств элементов колебательных контуров при при-ближении к внешним объектам можно использовать для создания датчиков при-ближения (proximity sensors). Эти датчики могут выдавать аналоговый сигнал, пропорциональный - по крайней мере в определенном диапазоне - расстоянию до заданного объекта, или цифровой сигнал при достижении заданного порогового значения расстояния. Электрические датчики приближения используют следующие принципы. • Индуктивные датчики приближения работают на основе излучения высокочастотного электромагнитного поля обмоткой, которая входит в колебательный контур. Электромагнитное поле индуцирует в проводящем материале объекта вихревые токи. Когда объект, расстояние до которого контролируется, приближается к датчику (обычно на 2-30 мм), колебания начинают затухать. Изменение тока в колебательном контуре можно использовать для срабатывания полупроводникового ключа. • Емкостные датчики приближения содержат затухающий колебательный RC-kou-тур. Емкость зависит от расстояния между обкладками конденсатора, их площади и свойств диэлектрика между ними. Датчик присоединен к одной из обкладок или к диэлектрику. Когда объект приближается к датчику, результирующее изменение емкости, а следовательно, и частоты колебаний, можно зафиксировать электрически и использовать для управления выключателем. Емкостный датчик може! обнаружить объекты, которые не являются проводящими. Диапазон срабатывания для таких датчиков обычно лежит между 5 и 40 мм. Емкостные датчики можно использовать также для измерения силы и давления. • Магнитные датчики приближения опознают приближение объекта по измен" нию характеристик магнитного поля и не имеют подвижных частей. Принии работы может базироваться на индуктивности, магнитном сопротивлени (reluctance), магниторезистивном эффекте или эффекте Холла. МагниторезИ тивный эффект и эффект Холла обусловлены одним и тем же физическим явя нием - сопротивление проводящего материала изменяется под воздействи внешнего магнитного поля. Если проводник с электрическим током подверга ся воздействию магнитного поля, его сопротивление увеличивается (магнитор зистивный эффект). Кроме того, на противоположных сторонах этого проо ника возникает разность потенциалов, которую можно измерить (эфФ Холла). Проводник должен быть расположен так, чтобы магнитное поле бы перпендикулярно направлению тока; разность потенциалов возникает вДО оси, перпендикулярной и магнитному полю, и направлению тока. Геометрич кая форма проводника выбирается так, чтобы максимальным был либо магни1* резистивный эффект, либо эффект Холла. Датчики Холла часто выполняк из полупроводниковых материалов. 4.4.4. Датчики температуры Зависимость свойств многих материалов от температуры не всегда является недостатком - из таких материалов изготавливаются датчики температуры. Конструк-1ИЯ выбирается таким образом, чтобы усилить температурную зависимость какой-дибо электрической характеристики. Эта зависимость, как правило, является нелинейной, что создает дополнительные трудности при ее воспроизведении. Обычно применяются три типа датчиков температуры: - термоэлементы; - резистивные детекторы температуры; - термисторы. Пример 4.4 Термоэлементы Первый термоэлемент был создан в 1887 году французским ученым Л е Ша-телье (1е Chatelier). В термоэлементе две точки контакта А и В соединены двумя параллельными проводами, выполненными из разных металлов (например, алюминий и медь). Таким образом создается замкнутая цепь (рис. 4.14). Т2( Си В С ис. 4.14. Принцип работы термоэлемента. Если температуры точек А и В различа-отся, то по замкнутой цепи циркулирует ток. На правом рисунке показана реальная Цепь для измерения этого тока. Точка А соответствует "горячему" спаю, а В и С - хо-одному. Точки В и С должны иметь одинаковую температуру До тех пор пока температуры в точках А и В одинаковы, ток в цепи не проте-кат температуры в точках А и В отличаются, то по цепи начинает проте-том" "Рческий ток. Это явление называется термоэлектрическим эффек-или эффектом Сибека (Seebeck), по имени открывшего его в 1821 году ледователя. Эта так называемая термоэлектродвижущая сила увеличивает- к функция разности температур. Возникающее напряжение лежит в пре-чуй "льких милливольт, что требует применения дополнительной очень ствительной - и поэтому сравнительно дорогостоящей - электронной из-gjjg •ьной аппаратуры. Из-за низкого уровня сигнала следует тщательно в ирать процедуру передачи и соединительные провода. Необходимо иметь У, что термоэлемент измеряет разность температур, а не ее абсолютное [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [ 21 ] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] 0.0168 |