
|
|
|
Главная страница Цифровые системы [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [ 33 ] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] Глава 5. Обработка сигналп 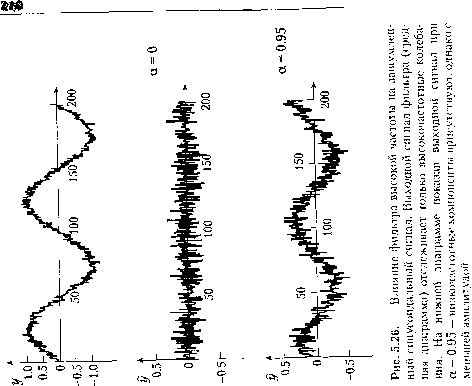 основы обработки иаишерительной информации 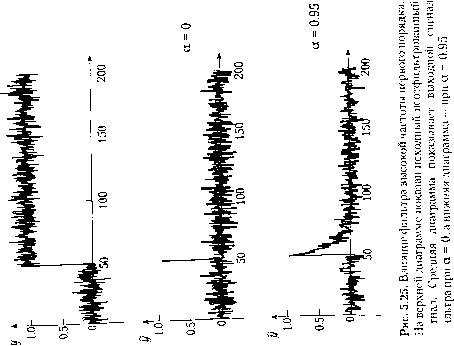 2.0 1.5 1.0 0.5 О 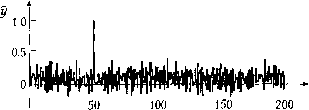 Рис. 5.27. Влияние фильтра высокой частоты на зашумленный синусоидальный сигнал со скачком при f = 50 (а = 0). Выходной сигнал фильтра имеет пик при t = 50, но при этом не содержит никаких низкочастотных колебаний 5.5. Основы обработки измерительной информации Преобразованные в цифровую форму измерительные данные должны быть под вергнуты проверке. После АЦ-преобразования необходимо выполнить следующ» операции ~ первичную обработку: - компенсировать дрейф; - сохранить исходные данные; - проверить соответствие исходных данных параметрам датчика - диапазону до пустимых выходных значений и диапазону скоростей изменения выходногс сигнала; если значение выходит из этих диапазонов, то должны генерироваться аварийные сообщения или другие указания для оператора; ~ вычислить среднее значение исходных данных ("посторонние" значения, кото РЬ1е заметно отличаются от других, возможно, должны быть отброщены); ~ применить цифровую фильтрацию; сохранить отфильтрованные данные. осле цифровой фильтрации выполняются: пересчет единиц измерения - масштабирование (при необходимости); линеаризация; другие типы обработки данных, например статистический анализ; автоматических системах - анализ входных данных для принятия решения "бйших действиях, например генерации управляющих или опорных сиг- f:e 3.. Рческие программные пакеты сбора данных обычно позволяют выполнять перации. § -е- 5.5.1. Достоверность исходных данных и аварийная сигнализация Существует много методов проверки достоверности исходных данных. Дд томатизированных систем достоверность играет особую роль, так как ошибки входных данных могут привести к некорректным управляющим действиям. В п вую очередь, необходимо убедиться, что величина входного сигнала лежит в пред лах рабочего диапазона датчика. Как указывалось ранее, выход за его границы мо жет указывать на исключительную ситуацию, например, что датчик отключен. Эт проверка не должна представлять собой простое сравнение с предварительно уста новленным пороговым значением, потому что в этом случае даже небольшие колебания около этого значения могут вызывать множество аварийных сигналов. Во избежание таких ситуаций обычно определяют полосу гистерезиса вокруг порогового значения (рис. 5.28). Аварийный сигнал генерируется только тогда, когда входная величина превысит второе пороговое значение. Для того чтобы сбросить аварийный сигнал, входная величина должна снова пересечь первое пороговое значение Новый аварийный сигнал может быть выработан после того, как второй порог будет достигнут снова. Проверка скорости изменения сигнала позволяет обнаружить ошибки датчика. Если изменения выходного сигна.па датчика в течение нескольких последних интервалов выборки превышают заранее определенное значение, то вырабатывается аварийный сигнал. Контроль скорости изменения должен проводиться перед цифровой фильтрацией, в противном случае изменения сигнала могут быть утрачены и проверка становится бессмысленной. сигнал 5.11 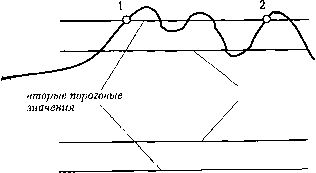 полоса гистерезиса первые пороговые значения полоса гистерезиса время Рис. 5.28. Полоса гистерезиса около пороговых значений Аварийная индикация устанавливается, когда значение сигнала достигает 1"очк и удерживается до тех пор, пока оно не станет меньше нижней границы полосы гИ резиса; новый аварийный сигнал будет выработан в точке 2 пооверка данных зонда, измеряющего концентрацию растворенного кислорода Концентрация в аэраторе станции биологической очистки сточньгх вод измеряется с помощью зонда, который имеет время установления меньше мину-хы Если зонд вынут из воды для калибровки и очистки, то выходной сигнал датчика увеличится в течение минуты от нормального значения 2-5 мг/л до значения насыщения - около 10 мг/л. Реальное увеличение концентрации растворенного кислорода в резервуаре не может произойти быстрее, чем за 10-20 минут. Поэтому такое значительное изменение сигнала в течение минуты должно считаться посторонним. Управ.пяющая система может использовать ЭТУ ситуацию как признак того, что произведена калибровка, и переустановить внутренние переменные. 5.5.2. Масштабирование и линеаризация Собранные значения входного измерительного сигнала во избежание недоразумений и ошибок должны быть пересчитаны в соответствующие инженерные единицы измерения. Преобразование от внутреннего представления у к инженерным единицам Z обычно можно произвести с помощью простой линейной зависимости z = k-y + k2 где) и 2 - константы. Для нелинейных датчиков эта зависимость выражается более сложной функци-ен или таблицей преобразования. Зависимость становится более сложной, если характеристики датчика имеют зону нечувствительности или гистерезис; в после-Днем случае должно быть известно направление изменения сигнала - возрастание убывание. В разделе 5.2.2 обсуждалось, как использовать весь диапазон АЦП для сохране- приемлемой точности. Если измерительный сигнал превышает диапазон АЦП, "Ова° проверить, что выход преобразователя не "провернулся" и не начал сли п" "" ~~ ™ -1 может, например, быть представлена как 0,1 В, стве с " диапазона АЦП равен 10 В. Эта возможность уже предусмотрена в каче-•войно"""* процедуры во многих системах и устройствах сбора данных; однако и контроль помогает защититься от неожиданностей. • Другие операции обработки данных "Рим"пд°т°* измерений можно уменьшить с помощью простого усреднения. Чем Не ожет быть запрограммирован для выборки сигнала в 10 раз быст-"-lOB g""™, и тогда грубое значение можно получить как среднее за 10 ин-Дихс Р"- Дополнительно можно отбросить одно-два значения, не уклады-я в общую тенденцию изменения данных за период усреднения, т, е. слишком больших или слишком маленьких. Это полезно в тех случаях, когда ной сигнал остается постоянным в течение периода усреднения, а его колебания ваны шумом с нулевым средним значением. Калибровка и компенсация дрейфа Значения входного измерительного сигнала часто нуждаются в компенсащ дрейфа или погрешностей калибровки датчиков или электронных устройств этой цели входные усилители и АЦП должны тестироваться и, при необходимое проходить калибровку с помощью известного и точного эталона напряжения. Bhcs торых случаях вся процедура калибровки может проводиться автоматически поду равлением программного обеспечения. Построение графиков Построение графика изменения сигнала во времени или как функции другогс сигнала позволяют выявить некоторые интересные детали: исключительные или необычные возмущения; потерю значений; - периодические колебания. Поэтому средства построения графиков являются важной частью любых компьютерных систем управления. Программное обеспечение для анализа данных Коммерческих программ для анализа и фильтрации данных очень много. Оцшк из наиболее широко используемых в академической и научной среде пакетов является MATLAB. MATLAB - это инженерный пакет для обработки и визуального представления, который объединяет в общую среду процедуры численного анализа, матричных вычислений, обработки сигналов и графического представления даннь MATLAB можно расширить дополнительными инструментальными средствами., конкретных приложений, например для фильтрации. Средства обработки сигна. включают в себя цифровую обработку, анализ временных рядов и функции для к струирования и анализа цифровых фильтров. Средства системной идентифика). обеспечивают возможность параметрического моделирования и описания сио Среди многих стандартных структур, представленных в MATLAB, есть и моД-авторегрессионного фильтра скользящего среднего. 5.5.4. Структура данных для обработки измерений Каждый входной измерительный сигнал связан с определенным набором пг, метров; эти параметры используются программами ввода и обработки измере Структура хранения этих параметров должна быть организована таким образом, бы разли.чные процедуры (подпрограммы или отдельные модули) могли легко к обращаться. Наиболее важные параметры, используемые в обработке измере" включают в себя: - указатели на данные измерений; адрес входного порта измерительной информации; , интервал выборки; , коэффициенты пересчета сигнала; I параметры датчика; пороговые значения для физического процесса (полоса гистерезиса с первым и дторым сигнальными пределами); - допустимая скорость изменения; параметры фильтра а, bp а; результат измерений до и после обработки; тогические переменные, управляющие подключением тех или иных процедур, например линеаризации, пересчета входных данных, фильтрации, обработки нештатных ситуаций. Вышеперечисленные параметры имеют разные форматы: одним соответствуют цечые числа, другим вещественные, третьим - логические переменные или символьные строки. Конкретное представление зависит от используемой вычислительной платформы и языка программирования. Некоторые принципы организации баз данных д.ля хранения и обработки измерительной информации изложены в разделе 12.4. 5.6. Заключение Частота выборки аналоговых сигналов является фундаментальным параметром обработки измерений в цифровой системе управления. В идеале эта частота должна быть по крайней мере вдвое больше самой высокой частотной составляющей исходного сигнала; на практике она должна быть еще выше для правильного восстановления сигнала за конечное время. К тому же если частота выборки мала и на исходный сигнал наложен высокочастотный шум, то в дискретном сигнале появляются псевдочастотные искажения - ложные частоты. После дискретизации уже невозможно отделить ложную информацию от исходной, "правильной". Для преобразования аналогового сигнала в цифровой необходимо убедиться том, что преобразователи обладают достаточным быстродействием, их точность со-тствует приложению и диапазон преобразования используется полностью. gj°oi3CTOTHbie компоненты сигнала, обычно появляющиеся из-за шумов и на-оста быть устранены либо подавлены до выборки.Чтобы исключить все отся " с частотами, превышающими половину частоты выборки, применя- аналоговые фильтры низкой частоты (противопсевдочастотные). высо фильтр можно сконструировать для подавления либо низких, либо Ител Очень часто эти фильтры реализуются на основе операционных уси- бли и "°°У надо применять с осторожностью, так как операционные усили-"оты ограниченный частотный диапазон и не реагируют на очень высокие ча- Цифровал фильтрация - хороший метод извлечения полезной информации из )в главе было рассмотрено, как реализовать ФНЧ и ФВЧ низких поряд- Фро Ртике широко используются простые фильтры скользящего среднего и °Bbie экспоненциальные фильтры низкой частоты первого порядка. Фильтры [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [ 33 ] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] 0.0204 |
||||||||||||||