
|
|
|
Главная страница Цифровые системы [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [ 26 ] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] глава 4. Вход и выход физическинчвоцессо 7. Исполнительные механизмы с электроприводом выключателя напряжете на выключателе время время Рис. 4.29. Броски напряжения, возникающие в индуктивном исполнительном механизме при размыкании выключателя Броски напряжения могут повредить выключатель, поэтому их необходимо гасить. Для этого можно использовать разрядный (щунтирующий) диод (free-wheeling diode), подключенный параллельно нагрузке (рис. 4.30). При размыкании выключателя ток индуктивности протекает через диод. Напряжение на исполнительном устройстве ограничено величиной менее 1 В, что соответствует падению напряжения на диоде. Выключатель должен выдерживать только номинальное напряжение, а не перенапряжения. Ток индуктивности через разрядный диод затухает экспоненциально; скорость затухания можно увеличить, включив последовательно с диодом резистор. индуктивная нагрузка выключатель 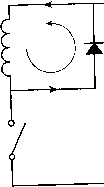 шунтируюищи диод источник питания - исполнительного -г механизма Рис. 4.30. Применение шунтирующего диода для гашения бросков напряжения, возникающих при отключении индуктивных нагру.зок 4.7. Исполнительные механизмы с электроприводом Термин привод (drive system) обозначает комбинацию двигателя с управляю" э.тектроникой. Применение управляющих схем значительно улучшает фyн,. нальные свойства электродвигателя, позволяя регулировать скорость и момент вЧ" роких пределах и с высокой точностью. Большинство исполнительных механйз*! используемых в системах управления, являются аналоговыми, например двигаТ постоянного тока, синхронные и асинхронные двигатели переменного тока. Ш"?" меняются и шаговые двигатели, но их системы управления заметно отличаются "Р иводов непрерывного действия. Привод может быть частью другого механизма, ° ймер системы позиционирования клапана, манипулятора робота и т. д. Обыч- - Qp-плейер содержит приводы для вращения диска и позиционирования держателя считывающего лазерного датчика. При этом и скорость диска, и положение го-овки должны выдерживаться с высокой точностью. В этом разделе рассмотрены наиболее важные аспекты точного управления электроприводом. 4 7.1. Усилители мощности Выходные порты компьютера имеют очень низкую мощность и не могут непосредственно управлять каким-либо физическим устройством. Для того чтобы возбуждать исполнительные механизмы, взаимодействующие с физическим процессом (двигатели и т. п.), выходной сигнал компьютера необходимо усиливать. Усилители мощности управляющих сигналов могут быть выполнены как отдельные устройства, так и входить непосредственно в состав исполнительного механизма. При уровнях мощности до нескольких сотен ватт можно использовать усилители, аналогичные применяемым в аудиосистемах, которые называются операционными усилителями мощности (power operational amplifiers). При больших мощностях чаще используется название сервоусилитель или программируемый источник энергоснабжения (programmable power supplies). Конструктивно последние обычно выполнены таким образом, чтобы их можно было монтировать вместе с двигателями или электроклапанами. Выходным напряжением программируемых источников можно управлять с помощью аналогового или цифрового сигнала. - широтно-импульсная модуляция (ШИМ, pidse-width modulation - PWM). В этом случае выходное напряжение переключается между двумя постоянными значениями с высокой частотой, обычно в диапазоне нескольких килогерц. Средний уровень напряжения поддерживается изменением (модуляцией) ширины импуль-•ов. На рис. 4.31 приведен пример такого сигнала. "Узкие" импульсы соответствуют низкому, а "широкие" - высокому среднему напряжению. Устройство ШИМ включается в схему управления мощностью на основе твердотельных выключателей типа Ранзисторов, мощных полевых МОП-транзисторов или тиристоров. В преобразова- телях "гранзи для мощностей порядка 300 кВт используются так называемые биполярные ДлТб"™ с изолированным затвором (Insulated Gate Bipolar Transistors - IGBT). я ольщих уровней мощности целесообразно применять запираемые тиристоры «е Тит Offthynstors ~ СТО thyristors). (Рц"°-°гия шим используется в тех случаях, когда обычный усилитель просто из-за высокого уровня мощности. Переключения приводят к тому, что твер-"венн" приборы загружены полной мощностью лишь короткое время и, соответ-Кущд ,°Р™ание мощности в них мало, а значит, ШИМ-усилители имеют высо-воз\,о ть- Допо-нительным преимуществом ШИМ-усилителей является Дно" непосредственного управления переключениями через цифровой вы- "enpgpyPS-ieHne широко используется в технике исполнительных механизмов Рив действия, таких как двигатели переменного и постоянного тока и гид-ению -"и частота переключений ШИМ-усилителя достаточно высока по срав-"остоянпой времени исполнительного механизма, то результирующий сиг- Глава 4. Вход и выход Физичргч., ленное среднее значение выходной мощности. Если частота переключений нал имеет некое среднее значение (рис. 4.31). Входное напряжение п между нулевым и максимальным значениями, в результате вырабатыв" но высока по сравнению с постоянной времени управляемой системы т Ч выходных величин пренебрежимо малы. ° ебац!,. межфазное напряжение 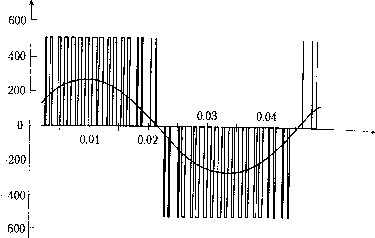 0.05 «РеЩс Рис. 4.31. Огибающая результирующего напряжения в цикле широтно-импульсной модуляции (ШИМ) Напряжение переключается между тремя значениями (ноль, положительный максимум и отрицательный минимум). Синусоидальная кривая - эффективное напряжение, приложенное к нагрузке Частотный преобразователь (frequency converter) - это регулятор частоты вр щения и момента двигателя, основанный на применении ШИМ-технологии; онпр* меняется для двигателей переменного тока. Частотные преобразователи знек пользовать как в новых системах, так и для модификации старых, большинство насосов и компрессоров уже имеют асинхронные двигатели, - тором смысле они подготовлены к применению частотных преобразователей. реализации сложных режимов с широким рабочим диапазоном, при низких с тях и больших моментах может потребоваться дополнительное охлаждение по нению с обычно применяемым в двигателях. 4.7.2. Управление позиционированием и скоростью приводов Стандартной задачей в промышленности и автоматизации процессов яв- высокоточное управление позиционированием сервомеханизма, например лятора робота, инструмента станка или магнитной головки дисковода ком Для ее решения двигатель сервомеханизма должен быть снабжен систем ой обр СВЯЗИ, вырабатывающей необходимое управляющее воздействие. Структура мы управления позиционированием показана на рис. 4.32; она не зависит нИ 7 HcnSf ительные ,,схниямы слектроприводом ,гате.«("Р аньоговое). jjeHHoro или постоянного тока), ни от типа управления (цифровое паюжен опорная скорость опорный момент травление положением y АЛ J управление [у/уЧ,. скоростью управление моментом двигатель }шгрузка момент скорость положение Рис. 4.32. Схема структуры сервосистемы управления позиционированием Сервосистема управления позиционированием содержит в каскадной конфигура-III три вложенных контура для момента, скорости и положения. Угол поворота из-ряется датчиком (разделы 4.3 и 4.4.1) и сравнивается с опорным значением. Исхо-из величины отклонения регулятор вычисляет новое значение скорости, испечивающее требуемое изменение положения. Чтобы изменить угловую скорость, двигатель должен изменить вращающий мо-•ит (пример 3.3, раздел 3.2.1). Требуемый момент вычисляется регулятором скоро-на основе встроенной динамической модели используемого двигателя. Вычисленное значение затем сравнивается с текущим, которое, например, можно оценить, измеряя ток ротора (пример 3.5, раздел 3.2.2). Разность моментов используется как входная величина для регулятора момента, оборудованного силовой электроникой, Р атывающей напряжение и частоту для управления двигателем, при, °""Уо систему управления позиционированием можно использовать, на-«омпакт продольного позиционирования лазерного датчика устройства чтения Вой с 0 многих исполнительных механизмах требуется управлять угло- tJ-пле положением, например в приводе вращения диска того же Лить этом случае внешний контур управления позиционированием можно этот с управления. Опорное значение для регулятора угловой скорос-Если устанавливается непосредственно. •"авляющ,* """ позиционированием базируется на аналоговой технике, Напри •"пьютер должен вырабатывать аналоговые сигналы; это можно сде-"Ращения "°ью цифро -аналогового преобразователя (раздел 5.2). Часто-Циометро**"* измерять тахометром (пример 4.3, раздел 4.4.1), а положение - "ч случе* заключается в сочетании аналоговой и цифровой технологии. Уппя "Р-пие частотой вращения осуществляется аналоговой электро-"Нияи." положением - компьютером (рис. 4.33). Такие структуры уп-ользуются с начала 1960-х годов. Глава 4. Вход и выход физическ1«щрад4е Ой у /1сполнительные механизмы с электроприводом выходной порт компьютера сигнал направления (выбор полярности в цифро-аналоговом преобразователе) импульсы увеличения угла поворота счетчик увеличения/ уменьшения регулятор положения опорное значение угловой скорости двигатель постоянного тока цифро-аналоговый преобразователь импульсы уменыиения угла поворота обратная связь по углу поворота 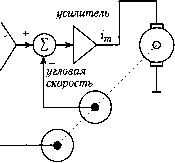 тахометр цифровой датчик положения аналоговый Рис. 4.33. Соединение аналогового и цифрового контуров сервоуправленго. Датчик положения - это относительный кодер угла поворота (пример 4.1, раздел 4.3.4), который выдает фиксированное число импульсов на каждый оборот вала двигателя. Когда двигатель вращается, генерируется последовательность импульсов, скорость поступления которых пропорциональна частоте вращения. Компьютер посылает импульсы позиционирования, которые добавляются к счетчику импульсов. Импульсы от датчика положения, напротив, вычитаются из него. Разность в числе положительных и отрицательных импульсов (значение счетчика) определяет ошибку позиционирования; эта величина подается в ЦАП, который вырабатывает аналоговый сигнал - напряжение, используемый в качестве опорного для скорости. Компьютер получает и выдает только импульсные сигналы, как при управлении шаговым двигателем, а не реальным двигателем постоянного тока. Контур сервоуправления можно полностью реализовать на цифровой технике-Датчик положения вала обеспечивает измерительную информацию и о положении, о скорости. Специальные платы, содержащие необходимые цифровые контуры уп равления, существуют для многих типов микрокомпьютеров. Такие контроллер выпускаются и в исполнении с сервоусилителями. ьным» 4.7.3. Шаговые двигатели Шаговые двигатели (stepping motors) являются приводными исполнитель механизмами, обеспечивающими фиксированные угловые перемещения (шг Каждое изменение угла поворота ротора - это реакция шагового двигателя входной импульс. Поскольку каждый шаг двигателя соответствует определенно- углу поворота ротора, а движение строго задано управляющими импульсами. управлять позиционированием и скоростью вращения очень просто. Это, одна справедливо при допущении, что ни один шаг не был пропущен, т. е. положе* ротора полностью определено входными импульсами. В этом случае нет необхоД* в обратной связи по углу поворота ротора - разомкнутый контур управле- В условиях переходного процесса при моменте, близком к номинальному, ""ть импульсов может быть пропущена. Если шаговому двигателю приходится работать в таких условиях, необходимо предусматривать контур обратной связи для компенсации ошибок. Преимущества шаговых двигателей: высокая точность, даже в разомкнутой структуре управления, т. е. без датчика угла поворота; естественная интеграция с приложениями цифрового управления; - отсутствие механических коммутаторов, которые часто создают проблемы в двигателях других типов. Недостатки шаговых двигателей: - малый вращающий момент по сравнению с двигателями приводов непрерывного типа; - ограниченная скорость; - высокий уровень вибрации из-за скачкообразного движения; - большие ошибки и колебания при потере импульсов в системах с разомкнутым контуром управления. Преимущества шаговых двигателей намного превосходят их недостатки, поэтому они часто применяются в тех случаях, когда достаточно небольшой мощности приводных устройств. 4.7.4. Двигатели постоянного тока Электрические и механические динамические свойства двигателей постоянного тока были описаны выше (пример 3.3, раздел 3.2.1, и пример 3.5, раздел 3.2.2). Двигатели постоянного тока широко используются в качестве сервомоторов, несмотря на ток* настоящее время все чаще для этого применяются двигатели переменного тока. Основным недостатком двигателей постоянного тока является наличие меха- ческого коммутатора (коллектора), который ограничивает как мощность, так и ча-постоя" двигателя. Этот недостаток отсутствует у бесщеточных двигателей комм тока, т. е. двигателей с ротором в виде постоянного магнита, у которых ный " осуществляется электронным переключением токов статора. Бесщеточ- ти постоянного тока имеет сходство с шаговым двигателем и некоторы- ипами синхронных двигателей. РяжениТ" двигателем постоянного тока осуществляется регулированием на-"че пеп" "Р-иого к ротору, и иногда напряжением возбуждения. Примене-ет мн**"" резисторов, включенных последовательно с источником питания, °-*ноТ™ ""Оз- Резистор рассеивает энергию, причем выделившееся тепло "Ь1Йспо Т"" возможных нежелательных эффектов. Распространен- °Ров ° п "Р-ня напряжением питания - использование твердотельных при-его сп ИМ-управления. Напряжение питания "нарезается" таким образом, что Прав значение имеет заданный уровень. В качестве переключателей в схемах ения двигателями постоянного тока обычно используются тиристоры. [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [ 26 ] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] 0.0458 |