
|
|
|
Главная страница Механотроны [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [ 19 ] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] 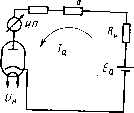 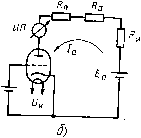 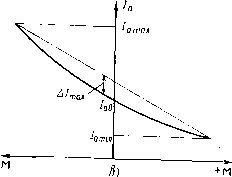 Рис. 3.1. Простейшие измерительные схемы на основе диодного (о) и триодного (б) механотронов, типичная рабочая (выходная) характеристика (в) механотронов, включенных в указанные схемы величине М, определяемая формулами (2.2), (2.9), (2.13), (2.17) и (2.37). Рабочая чувствительность по напряжению механотронного преобразователя, включенного по схеме рис. 3.1, выражается следующим образом [4]: т]«м ,3 2) где Т1им-статическая чувствительность механотронного преобразователя по напряжению к измеряемой механической величине М. Для случая /?аХ/?п + и) формулы (3.1) и (3.2) принимают вид " - (3.3) up - 1 + RJRt (3.4) Зависимость /a = f(M) для схем рис. 3.1 является рабочей (выходной) характеристикой простого диодного или триодного механотронного преобразователя. Степень нелинейности Ер этой характеристики определяется так же, как и в статическом режиме (рис. 3.1,в): ер= """ -100%. (3.5) А max h min Для расчета степени нелинейности рабочей характеристики /a=f(M) диодного механотрона, включенного по схеме рис. 3.1,а, получена следующая формула: 1 +RJRi -0,1 (3 6) а.кО где Ёэ, - степень нелинейности статической характеристики перемещения диодной механотронной системы, определяемая по (1.20); Arf/rfa.KO-относительное смещение подвижного анода; RJRi - отношение сопротивления анодной нагрузки к внутреннему сопротивлению механотрона в рабочей точке ((/а = const, й?а.ко = const). Оптимальное значение анодной нагрузки а.опт для схемы рис. 3.1,0, при которой значение Вр равно О, определяется из простого соотношения [4] /?а.опт = 7,23/?,о. (3.7) где /?,о -внутреннее сопротивление механотрона в рабочей точке. Выражение (3.7) получено при условии Ra{R„-\rRn). Следует отметить, что простейшие схемы с механотронами (рис. 3.1,а, б) на практике встречаются срав- 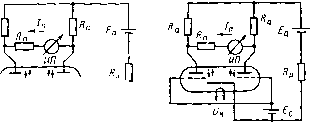 Рис. 3.2. Мостовые измерительные схемы на основе диодного (а) и триодного (б) сдвоенных механотронов 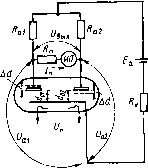 Рис. 3.3. К расчету параметров механотронного моста ннтельно редко. Значительно чаще применяются мостовые схемы на основе сдвоенных механотронов (рис. 3.2), позволяющие снизить влияние флюктуации источников питания и внутриламповых процессов на выходной сигнал преобразователя. При этом, как отмечалось выше, сдвоенные конструкции механотронов могут выполняться как полностью симметричными, например с двумя подвижными анодами для сдвоенных диодных механотронов, так и несимметричными, например с одним подвижным, а вторым неподвижным анодом. Ниже приводится анализ работы мостовой измерительной схемы на основе сдвоенных диодных механотронов продольного управления, которые наиболее широко применяются в измерительной технике. При этом рассматривается случай механотронного преобразователя перемещений, в котором измеряемое перемещение а, подаваемое на конец штыря механотрона, равно перемещению его подвижных анодов М. Указанная измерительная схема предста1вляет собой четырехплечий мост, образованный межэлектродными промежутками (диодами) механотрона и сопротивлениями анодных нагрузок /?а, и R. (рис. 3.3). В одну из диагоналей моста включен источник анодного питания fa с внутренним сопротивлением i?„. Во вторую,, так называемую измерительную диагональ моста, включен отсчетный прибор ИП, имеющий внутреннее сопротивление /?п- В режиме баланса моста ток /„ в его измерительной диагонали равен нулю. При подаче механического сигнала на механотрон вследствие перемещения его подвижных анодов изменяется сопротивление межэлектродных промежутков (диодов) механотрона, в результате чего мост разбалансируется и ток измерительного прибора /п становится отличным от нуля. Зависимости тока /„ и выходного напряжения t/вых от перемещения подвижных анодов являются выходными характеристи-120 ками мостовой измерительной схемы с механотроном, называемой в дальнейшем механотронным мостом. Для схемы механотронного моста, изображенной на рис. 3.3,. пренебрегая сопротивлением источника питания (Rh=0) и используя закон степени 3/2 для выражения анодных токов, получаем следующую систему уравнений: t/al - а2 = нп. /а1 = : " (3.8) (3.9) (3.10) (3.11) (3.12) Здесь приняты обозначения: /С-коэффициент в уравнении закона степени 3/2, равный ASy (где Sk -часть поверхности катода, обращенная к одному из анодов); rfg.Kl " а.кг"" электродные расстояния диодов механотрона; а.к1 ~ oi d=d„2-Ad (где doi и do2 - начальные значения указанных расстояний). Рещив систему уравнений (3.8) -(3.12), получим выражение для рабочей чувствительности механотронного моста в общем виде [51]: d{Ad) ~ Rn + R[ + K (3.13) Используя формулу (3.13), получаем следующие выражения для выходных характеристик механотронного моста: (3.14) (3.15) Глеяует отметить что формулы (3.141 и (3.15) выражают за-внсн?о:ТГ=/(™)и ulf(Ad) в неявном виде, так как вхо дящие в них величины i",-,, /?, и /?2 в общем случае также явГяются функциями от Ad. При этом, очевидно, выходные характеристик. /I=f(Ad) и Ueb,x=f(Ad) являются нелинейными. Для области малых механических сигналов, воспринимаемых механотроном, когда Ad<g;doi и Ad<g;do2, зависимостями Чл, Чг, и от Ad можно пренебречь, и выходные характеристики п=/(Д) и f/Bbix=f(Ad) становятся линейными функциями: /п(л) = Ru + Ro> + K у.-о!;. + у,02/?;2 (3.16) (3.17) где *-;o„ 1Гго2, являются постоянными величинами, не зависящими от Ad. Наибольшее практическое значение, имеют случаи симметричного механотронного моста, работающего в сочетании со сдвоенным диодным механотроном с двумя или одним подвижным анодом. Для механотрона с двумя подвижными анодами и при симметрии параметров механотронного моста, т. е. при условиях Ril - Ri2 - а! Rl\ \d=0 = Rii \d=0 - Rio, д£/=о = *Рг2 Ud=0 = *F,-0) a следовательно, при /? =/?2 = o =а/?го/(а+/о). из (3.13) для рабочей чувствительности по току механотронного моста имеем ЦТ - d{Ad) /?„ + 2/?; \-i-Rj2R 1 + RJ2R, + RJ2R,0 и для чувствительности по напряжению (3.18) d{Ld) d{Ld) Ad=0 Из выражения (3.18) следует, что с целью повышения рабочей чувствительности механотронного моста по току к перемещению целесообразно уменьшать величину сопротивления в измерительной диагонали /?„ лишь до Rn~0,\RaRio/{Ra + Rio)- При дальнейшем уменьшении R„ чувствительность iF,moct возрастает незначительно. 122 Аналогично выражение (3.19) показывает необходимость увеличения сопротивлений анодных нагрузок R и сопротивления измерительной диагонали моста /?„ с целью повышения рабочей чувствительности по напряжению к перемещению Чимост но до величины, не более чем на порядок превышающей дифференциальное внутреннее сопротивление механотрона Rio- Для механотрона с одним подвижным анодом при симметрии параметров механотронного моста соблюдаются следующие условия: /?а1 = а2 - al RiiUd=o = RnUd=o=Rio F«k=o=F,o; F,2 = 0. Для чувствительности моста по току к перемещению из выражения (3.13) получим W. = /МОСТ d{Ad) 1 Ad=0 /?п+2/?; 2/?a (3.20) Сравнение выражений (3.18) и (3.19) показывает, что чувствительность механотронного моста на основе сдвоенного механотрона с одним подвижным анодом вдвое ниже чувствительности моста, в котором применен механотрон с двумя подвижными анодами. Для оценки нелинейности выходной (рабочей) характеристики механотронного моста обычно используется величина максимальной степени нелинейности А/п, -.100% (3.21) где Al„mat-максимальное значение отклонения выходной характеристики от аппроксимирующей прямой; In,„ах - максимальное значение выходного тока, соответствующее концу рабочего диапазона измеряемых перемещений. Степень нелинейности выходной характеристики механотронного моста зависит не только от его параметров, но и от способа линеаризации. На рис. 3.4 приведены типичные случаи линеаризации характеристики /п fiAd). [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [ 19 ] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] 0.0138 |