
|
|
|
Главная страница Механотроны [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [ 14 ] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] жению Ч : 1„= Для определения удельной по току чувст- вительности Од1 электродной системы механотрона используется формула (1.35), а для оценки степени нелинейности Вэ: характеристики перемещения этой системы можно воспользоваться формулой (1.20) или графиком рис. 1.7,6, предварительно рассчитав относительное смещение подвижного электрода. На рис. 2.6 приведены номограммы, которые значительно упрощают определение основных конструктивных параметров электродной системы диодного механотрона продольного управления. Этн номограммы представляют собой семейство зависимостей 4"г/5к = =/(ta) пр* а.кnsl, которые получены расчетным путем с использованием номограмм рис. 1.8-1.10 и с учетом контактной разности потенциалов к.р.п""-,8 В. Эта номограмма имеет особенно большое практическое значение при определении конструктивных параметров электродных систем диодных и триодных механотронов продольного управления, так как позволяет определить эти параметры для широкого и наиболее распространенного диапазона значений анодных напряжений (до t/a =22 В). Определение указанных конструктивных параметров с помощью номограммы, изображенной на рис. 2.6, сводится к определению величины У 5к для заданного значения [/а и предварительно определенного из соотношения (2.57) межэлектродного расстояния ако- Далее по заданному значению легко найти активную поверхность катода Sk- Исходными данными прн расчете электродных систем триодных механотронов продольного управления обычно являются статическая чувствительность по напряжению к перемещению подвижных электродов Wu, внутреннее сопротивление Ri и диапазон перемещений Дшал- подвижных электродов. Иногда оговаривается также наибольшая величина анодного напряжения. Расчет электродной системы триодного механотрона сводится к определению ее конструктивных (5, d, d , р, 6) и электрических (i/a и t/c) параметров по заданным "Гц, Ri и заданному диапазону перемещений подвижного электрода. Поскольку уравнения (см. табл. 1.2), связывающие конструктивные и электрические параметры триодных механотронов, позволяют выбрать большое число комбинаций 5к, 7"к, d , а.с t/a и t/c, удовлетворяющих заданным Чц и то расчет электродных систем триодных механотронов является неоднозначным. В связи Ь этим при расчете механотронов часть конструктивных и электрических параметров задается произвольно, а другая часть параметров рассчитывается. Определение основных размеров и параметров триодных электродных систем производится обычно в следующей последовательности. Прежде всего, определяются межэлектродные расстояния rf. к " rfg р. Для триодных механотронов с подвижными анодами начальное расстояние анод - сетка rfj.c о определяется исходя из неравенства а.сО>Дс?а.сша.г + Логр. (2-58) где.Лйд,ц - заданный диапазон перемещений анода; h-высота ограничителя перемещений анода, выступающая над плоско- стью сетки (рнс. 2.5,6). Из конструктивных и технологических соображений величина ftprp выбирается обычно равной 0,2-0,3 мм. Следует отметить, что в сдвоенных конструкциях триодных механотронов с двумя изолированными друг от друга анодами даже ничтожно малое нарушение центровки сетки по отношению к катоду при малых расстояниях сетка - катод вызывает резкую электрическую несимметричность обеих половин механотрона и приводит к дополнительному разбросу параметров и к трудности балансировки мостовой измерительной схе.мы. В связи с вышесказанным при проектировании механотронов рекомендуется выбирать расстояние сетка-катод большим 100 мкм. При этом для механотронов с подвижной сеткой и с подвижными сеткой и анодом начальное расстояние rf<,g должно удовлетворять неравенству dz.KO > Дс.к max + Кт, (2.59) где Adpij-заданный диапазон перемещений сеткн (рис. 2.5,в) или анода и сетки (рис. 2.5,г); Яогр -высота ограничителя перемещений сетки, выступающая над поверхностью катода. Обычно величина йогр выбирается большей или равной 0,1 мм: /loip > >0,l мм. В конструкциях триодных механотронов с подвижной сеткой, очевидно, должны быть предусмотрены ограничители (Адгр) перемещения сеткн и в. сторону анода (рпс. 2.5,в). При этом начальное расстояние анод -сетка определяется исходя из неравенства а.сО (2.60) причем величина hp выбирается порядка 0,2-0,3 мм. Определение параметров сетки р, б, х-триодного механотрона сводится к следующему. Исходя из условия [23-25] P<0,7d,., (2.61) при которо.м гарантируется отсутствие островкового эффекта и равномерность электрического поля вдоль поверхности катода, определяют шаг сетки р по известному расстоянию ско- Далее, задаваясь коэффициентом заполнения сетки z (обычно для триодных механотронов х»0,1-0,2), рассчитывают диаметр проволоки навивки сетки 8 = хр. При этом необходимо учитывать, что наименьший диаметр проволоки навивки, как правило, определяется технологическими возможностями и конструкцией сетки и составляет обычно в механотронах 0,02-0,15 мм. Для большинства конструкций триодных механотронов можно рекомендовать значения потенциала сетки Uc порядка •-0,5... ...-1,5 В, при которых в триоде отсутствуют сеточные токи, а анодное напряжение может быть выбрано сравнительно низким при обеспечении необходимого уровня анодных токов. При выборе рабочей температуры катода Тк следует исходить из обеспечения достаточно большого запаса по току эмиссии катода (ь>20/а) и оптимального теплового режима механотрона, Прн этом Тк выбирается обычно того же порядка (1100-1150 К), что и в маломощных приемно-усилительных лампах. Для опреде- ления плотности тока эмиссии катода можно воспользоваться зависимостью js =/(?"к) (см. рис. 1.6). При выборе и а можно воспользоваться рекомендациями, приведенными в табл. 2.2. Расчет значения анодного тока /а триодного механотрона и активной поверхности его катода 5к состоит в следующем: 1. По ранее определенным йб-гп I г I I I гг-\" параметрам по формуле (1.30) рассчитывают значение плотности тока бесконечности j «>. 2. Коэффициент усиления триода ц определяют по формуле [23-25] 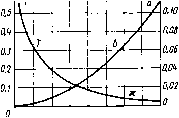 [1 = (2.62) 0Л5 0,1 0,15 0,2 0,25 0,3 ЦЗЗ 0,4- X Рис. 2.7. Зависимости Т=/(х) и Д = Г(х) где р -шаг навивки сетки; А и Т - функции коэффициента заполнения сетки (рис. 2.7) 3. Значение действующего потенциала t/д с достаточной точностью находят по формуле [23-25] (2.63) + (/к.р.п+ - а- 4. По формуле (1.31) для выбранной Тк вычисляют Ur- 5. По известным t/j/f/r, уУу„ и у, используя номограм.мы (см. рис. 1.8-1.10), определяют отношение Уа/уоо затем и значение плотности анодного тока j\. 6. Далее по найденным значениям л/Уос и Л/У» высчитывают величину SjiUrlfz из характеристик рис. 1.9 и 1.11. 7. По заданной величине внутреннего сопротивления и найденному ц рассчитывают крутизну 5л характеристики диода, эквивалентного триоду. При этом можно воспользоваться известной формулой (см. табл. 1.2) 8. Затем по найденному из нормированных характеристик значению SnUrJla и рассчитанным значениям 5д и Uj определяют анодный ток /а механотрона и величину активной поверхности катода, обращенной непосредственно к аноду: 5к = /а/у;. Для приближенного предварительного расчета триодных механотронов можно воспользоваться более простыми формулами, полученными из уравнения закона степени 3/2 и приведенными в табл. 1.3. Основными исходными данными при расчете электродных систем механотронов поперечного управления, так же как в случае механотронов продольного управления, являются чувствительность по току 41 или по напряжению Чц к перемещению и рабочий диапазон перемещений хах подвижного электрода. Дополнительно оговаривается обычно величина анодного напряжения и внутреннее сопротивление механотрона. Расчет электродных систем механотронов поперечного управления сводится к определению межэлектродных расстояний, активной поверхности и размеров катода, конструктивных параметров сетки (для триодных механотронов) и тех электрических параметров, которые не определены техническим заданием на разработку. Этот расчет, так же как и в случае механотронов продольного управления, не является однозначным. Поэтому часть параметров выбирается произвольно, а остальные-рассчитываются. При выборе межэлектродных расстояний, температуры катода, рабочего напряжения и конструктивных параметров сетки (в триодах), а также некоторых других параметров можно руководствоваться соображениями, изложенными выше при описании расчета механотронов продольного управления, а также данными табл. 2.2. Для расчета электродной системы диодного механотрона поперечного управления с плоскопараллельными электродами используется формула, приведенная в табл. 1.2. При этом ширина катода t, входящая в эту формулу, определяется исходя из заданного диапазона перемещений подвижных электродов. Для простейшей двухэлектродной системы (см. табл. 1.2) ширина катода, очевидно, равна наибольшему диапазону перемещений подвижного электрода, а для двуханодной симметричной конструкции - удвоенному наибольшему диапазону перемещений подвижных электродов. В соответствии с этим можно записать t>Xmax (2.64) для простейшей двухэлектродной системы и t>2xax (2.65) для двуханодной симметричной конструкции (см. табл. 1.2). Соотношения (2.64) и (2.65) позволяют рассчитать минимальную ширину катода механотрона. Обычно же наименьшая ширина трубочки реального катода составляет 0,5-0,8 мм, так как при таких размерах обеспечивается необходимая механическая прочность катода. После определения t по формуле (2.64) или (2.65), используя выражения табл. 1.3, легко рассчитать максимальное значение анодного тока / а max механотрона. Затем по номограммам рис. 1.8-1.10 по предварительно выбранным значениям Тк, и f/a рассчитывается плотность анодного тока /а и, наконец, определяется активная поверхность катода (обращенная непосредственно к аноду): S = -Lljnax (2.66) /а max При проектировании триодных механотронов поперечного управления кроме рабочего диапазона перемещений подвижного электрода задаются еще два параметра: ffj и Ri (или и Ri). Для расчета этих механотронов используются формулы, приведенные в табл. 1.3. Ширина t катода при этом определяется так же, как и для диодного механотрона поперечного управления. Аналогично рассчитывается и максимальный анодный ток /а талг-Межэлектродные расстояния dKO и с.аО Д-" триодного механотрона попереч- ного управления обычно выбираются следующего порядка: dc.KO> > 0,1 мм; dgo -0,3-0,6 мм. Конструктивные параметры и потенциал сетки для этих механотронов определяются так же, как и для триодных механотронов продольного управления. Аналогично находят значения 7"к, ц н Ur~ Далее по номограммам рис. 1.8-1.10 рассчитывается плотность анодного тока /а, а затем н величина активной поверхности катода, обращенная непосредственно к аноду (или к одному из анодов) триода. 2.3. БАЗОВЫЕ КОНСТРУКЦИИ МЕХАНОТРОННЫХ ПРЕОБРАЗОВАТЕЛЕЙ РАЗЛИЧНОГО НАЗНАЧЕНИЯ Конструкции механотронных преобразователей перемещений и усилий. На рис. 2.8-2.11 изображены базовые конструкции механотронных преобразователей перемещений и сил. Эти механотроны представляют собой сдвоенные диоды или триоды продольного управления с плоскопараллельной системой электродов. При работе механотронов их катоды остаются неподвижными относительно баллона приборов. Роль подвижных электродов выполняют в диодных механотронах аноды (рис. 2.8, 2.9), в триодных -аноды (рис. 2.10) или аноды и сетки (рис. 2.11). При этом разработано два варианта конструкций приборов: симметричная конструкция, в которой относительно катода перемещаются оба анода одновременно (или обе пары подвижных электродов анод-сетка) и несимметричная конструкция, в которой подвижным является лишь один из двух анодов [41]. В механотронах первого типа благодаря симметричности их конструкции легко достигается высокая чувствительность, высокая стабильность показаний и высокая линейность выходной характеристики. Механотроны этой конструкции наиболее пригодны для особоточных длительных и непрерывных измерений. Они выполняются чаще всего с октальным цоколем. Механотроны несимметричной конструкции проще в изготовлении, чем механотроны симметричной конструкции, хотя и уступают, как правило, последним в отношении чувствительности, стабильности показаний и линейности выходной характеристики. Эти механотроны легко выполняются в сверхминиатюрном оформлении с гибкими выводами. Схемы конструкций диодных механотронных преобразователей перемещений и усилий даны на рис. 2.8- Электродные системы этих механотронов представляют собой сдвоенные диоды с плоскопараллельными электродами. Оксидный катод / косвенного накала (подогреватель 11) неподвижен. Подвижными электродами механотронов являются один (рис. 2.8,6 и е) или два (рис. 2.8,а) анода 2, жестко соединенных со стержнем 3, который впаян (или вварен) в тонкую эластичную-мембрану 5, являющуюся частью вакуумной оболочки механотрона. В механотронах, изображенных на рис. 2.8,6 и б,-помимо подвижного анода 2 имеется неподвижный анод 4, который расположен на строго фиксированном расстоянии от катода 1. Мембрана 5 механотронов соединяется со стеклянным баллоном 6 посредством металлического фланца 7, который предохраняет ее. от тепловых и механических повреждений при монтаже и эксплуатации приборов. Крепление неподвижных электродов производится при помощи слюдяных дисков 8 и металлических траверс 9. Механотроны снабжены стандартными газопоглотителями 10. 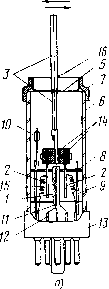 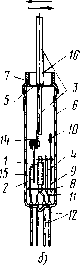 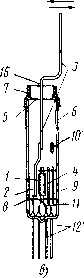 Рис. 2.8. Конструкции двуханодных диодных механотронных преобразователей перемещений и усилий с одним (б, в) и двумя (а> подвижными анода.мн [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [ 14 ] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] 0.0131 |