
|
|
|
Главная страница Механотроны [0] [1] [2] [3] [4] [5] [6] [7] [ 8 ] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] высокочастотного разряда (ВЧ разряда) и возникновения постоянной разности потенциалов между внутренними электродами 2 разрядной трубки / вследствие образования в разрядном пространстве постоянной составляющей внутреннего электрического поля, при наличии внешнего ВЧ электрического поля. Когда к наружному электроду прикладывается ВЧ синусоидальное напряжение от ГВЧ в разрядной трубке / возникает тлеющий ВЧ разряд. В цепях внутренних электродов 2 и конденсаторов С протекают токи. При нахождении наружного подвижного электрода 3 по середине трубки / пространственные заряды и потенциалы пространства симметрично распределяются между электродами 2. При этом постоянные потенциалы этих электродов равны и выходное напряжение, измеряемое вольтметром V, равно нулю. При перемещении электрода 3 на величину а возникает асимметрия в расположении ВЧ плазмы, пространственных зарядов и распределения потенциалов между электродами 2, в результате чего образуется постоянная разность потенциалов Иу,, пропорциональная перемещению а и измеряемая выходным прибором схемы-вольтметром V. Описанный преобразователь имеет линейную выходную характеристику (рис. 1.17,6) в широком диапазоне перемещений -порядка нескольких сантиметров. Таким образом, этот преобразователь может найти применение для измерения больших линейных перемещений-до 10 см и более. При этом он обладает высокой стабильностью и высокой экономичностью. Следует отметить также, что данный преобразователь является бесконтактным. 1.5. КИНЕМАТИЧЕСКИЕ СИСТЕМЫ МЕХАНОТРОННЫХ ПРЕОБРАЗОВАТЕЛЕЙ РАЗЛИЧНОГО НАЗНАЧЕНИЯ Наибольшее распространение в механотронных преобразователях нашли кинематические системы, упругие звенья которых выполнены в виде: плоской мембраны, в центр которой впаян или вварен управляющий стержень (используется в преобразователях перемещений и усилий, а также в механотронных преобразователях ускорений и угломерах с внешним механическим управлением; плоских и гофрированных мембран, а также силь-фонов и мембранных коробок (используются в преобразователях давлений); консольных пружин, консольных балок на торсионном подвесе и двухплечих балок (типа коромысла) на торсионном подвесе (используются в преобразователях ускорений, параметров вибраций и углов поворота). В табл. 1.3 представлены схемы указанных выше кинематических систем механотронов, основные характеристики этих систем, т. е. зависимости перемещений подвижного электрода от входной механической величины, а также формулы для расчета чувствительностей систем [32-34]. Следует отметить, что в общем случае основные характеристики кинематических систем механотронных преобразователей нелинейны. Однако для большинства механотронов характерны весьма малые рабочие диапазоны перемещений подвижных электродов, в пределах которых эти характеристики с достаточной точностью можно считать линейными. Формулы для расчета чувствительностей, приведенные в табл. 1.3, получены для линейных участков Ас?л„„ основных характеристик кинематических систем. Из представленных в табл. 1.3 кинематических систем механотронов наиболее сложным силовым воздействиям при работе подвергается система типа мембрана-стержень. Она представляет собой двухплечий рычаг с точкой опоры в месте соединения стержня с мембраной. Отклонения стержня вызывают асимметричный изгиб мембраны. Кроме асимметричного изгиба, мембрана подвергается также действию атмосферного давления Ратм в виде распределенной нагрузки, вызывающей прогиб Wq мембраны внутрь вакуумного баллона механотрона (табл. 1.3). Проведенные исследования показали, что действие атмосферного давления можно не учитывать при расчете кинематических систем мембрана-стержень с достаточно жесткими мембранами, когда чувствительность системы Of =Oyj/т/г<10-* сН--см-Однако распределенная нагрузка, создаваемая атмосферным давлением, значительно (в 2-4 раза) уменьшает чувствительность систем с тонкими эластичными мембранами. Для расчета систем с жесткими мембранами используется формула [4], приведенная в табл. 1.3. Для расчета высокочувствительных систем с тонкими эластичными мембранами (ар>10- сН-Х Хсм-) необходимо использовать специальные диаграммы j тп = = f{D„!Dc) прн /i = const (рис. 1.18), полученные эксперименталь- Основные виды кинематических систем механотронных преобразователей Таблица 1.3 Назначение преобразователя Названия и схемы кинематических систем Вид основных характеристик Формулы для расчета чувствительностей Измерение перемещений Мембрана-стержень
Измерение сил Мембрана-стержень Ратм ,= - = /киЗ 12(l-t) £Лз где Р<1-коэффициент, учитывающий действие атмосферного давления на мембрану, £ и ц - модуль упругости и коэффициент Пуассона материала мембраны Продолжение табл. 1.3 Измерение давлений 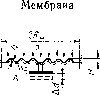 Adwo Для плоской мембраны 2,33-10-*. " =р (пл) для гофрированной мембраны 1 Ri а„,,, = 1,36-10-3--, а Eh где а -постоянный коэффициент, зависящий от глубины гофрировки H/h [61] Измерение давлений Мембранная коробка 2Я . Ad Adwo Для мембранной коробки складывающегося типа, состоящей из двух идентичных гофрированных мембран диаметром 2Rm, (К) = З-р (г) Измерение давлений 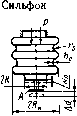 Измерение ускорений и параметров вибраций Консольная пружина  Ad и Ad=Wa где Ао, Аи А2 и Во - постоянные коэффициенты; « - число гофр; а -угол обжатия сильфона [61]  > (с) 136.10-3-<" + °)1:х 4 Eh„ X Ао - аЛ) + аМг + Bohf,IR gEbh? 3p d 2 £Л2 где P - вес инерционной массы М; р и £ - плотность и модуль упругости материала пру- жины Окончание табл. 1.3 Измерение ускорений, параметров вибраций и углов поворота Балка иа торсионном подвесе  Измерение ускорений, параметров вибраций и углов поворота Коромысло на торсионном подвесе 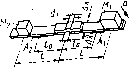  а ~ G-ndg где Я - вес инерционной массы М; G - модуль сдвига материала пружины а Gd] где AP = Pi-P2 -разность весов инерционных масс Mi и Мг [0] [1] [2] [3] [4] [5] [6] [7] [ 8 ] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] 0.0295 |