
|
|
|
Главная страница Механотроны [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [ 13 ] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] ше предельно-допустимого коробка «складывается», т. е. верхняя мембрана коробки плотно накладывается на нижнюю мембрану, причем из-за идентичности мембран при соприкосновении зазоры между их поверхностями практически отсутствуют. При этом, очевидно, действие внешней нагрузки на верхнюю мембрану почти полностью компенсируется действием этой же нагрузки на нижнюю мембрану, и, таким образом, вредной деформации упругого элемента не происходит. Гофрированные мембраны и мембранные коробки целесообразно применять в преобразователях избыточного давления и широкодиапазоиных маиотронах. В маиотронах, предиазиаченных для измерения очень малых давлений (например, для измерения давления в диапазоне 1,ЗХ -1,3-10 Па), в качестве упругих элементов обычно применяются сильфоны, так как они обладают сочетанием высокой чувствительности к давлению (благодаря большой эффективной поверхности) и сравнительно малыми габаритными размерами. При этом целесообразно использовать бесшовные сильфоны из нержавеющей стали 36НХТЮ, которые выпускаются отечественной промышленностью по ГОСТ 11915-72 [40]. В указанном ГОСТе приводятся параметры стандартных сильфонов с различными типовыми размерами. За основные параметры приняты: эффективная поверхность 5эф сильфона, максимальный ход одного гофра kpiax-в пределах которого механический гистерезис не превышает 0,5%, и жесткость ур одиночного гофра к продольно-осевой силе. Величина рабочего хода tJo-растяжения (сжатия) сильфона от воздействия разности наружного рн и внутреннего рв давлений [3, 40] определяется как дао = «{Ри - Ри) = П (/?„ - р,) -- , (2.48) где tplplSsf-жесткость одного гофра к воздействию давления. Чувствительность сильфона к давлению ajj (см. табл. 13) связана с величинами 7, и -р следующим образом: =р(с) = (2.49) я„1и ?"°Р сильфон для манотрона с заданным диапазоном давлении, необходимо, исходя из предварительно рассчитанной чув ствительности сильфоиа к давлению а (см. табл. 1.3) и выбрав значение его эффективной поверхности и число гофров определить жесткость одиночного гофра из (2.49): Т.= - . (2.50) гофГовб.То.Тб" выпускаются со следующ им числом Рабочий ход сильфона в проектируемом манотроне рассчитывается по формуле даОтаг = °р МРтах- (2.51) Обычно womax оказывается в несколько раз меньше максимального хода сильфона, равного произведению яЯад-,где п и Хтах- соответственно число гофров и максимальный ход одного гофра, определяемые из таблиц ГОСТ 11915-72. При этом характеристика сильфона Wg=f(p) в маиотронах линейна и однозначна с высокой точностью. При проектировании механотронного преобразователя ускорений (акселерометра) в первую очередь выбирают тип кинематической системы, пользуясь данными табл. 1.3. Далее, по рассчитанной чувствительности о а (табл. 2.1), основываясь на одной из формул табл. 1.3, проектируют кинематическую систему акселерометра. Например, из габаритных и конструктивных соображений выбирают длину /о, толщину h и вид материала (с известными Е и ц) плоской пружины, работающей на изгиб (см. табл. 1.3), и определяют вес инерционной массы М, предварительно выбрав также высоту / ее подвеса на пружине. По найденной чувствительности к ускорению Од определяется частота fo собственных колебаний (резонансная частота) кинематической системы акселерометра по формуле [4] « 27Г / а. (2.52) Частота fo является важным параметром акселерометра, который ограничивает частотный диапазон измеряемых им ускорении. При расчете виброакселерометра чувствительность его кинема-тической системы к ускорению определяется исходя из резонансной частоты fo из формулы (2.52): (2.53) Рассчитав Оа и выбрав тип кинематической системы виброакселерометра, определяют ее конструктивные параметры так же, как и в случае обычного акселерометра. При разработке механотронных амплитудомеров необходимо стремиться к тому, чтобы собственная частота fo колебаний кинематической системы была бы как можно более низкой. Чувствительность Од кинематической системы амплитудомера к действующему при вибрации ускорению определяется из уравнения (2.53). Рассчитав а о, находят конструктивные параметры кинематической системы так же, как н в случае механотронного акселерометра. Следует отметить, что в большинстве реальных конструкций механотронных амплитудомеров инерционная масса жестко крепится непосредственно к подвижному электроду преобразователя, причем смещения этого электрода Ad равны измеряемым перемещениям у вибрирующего объекта. Очевидно, максимальное пере-6* 83 мещение Adnia подвижного электрода равно максимальной амплитуде (/тал: вибрации, минимальное перемещение Admj„подвижного электрода равно минимальной амплитуде ymin вибрации, а чувствительность (или Чц) равна чувствительности уцу(али -цу). При этом расчет конструктивных параметров электродной системы амплитудомера полностью аналогичен расчету электродной системы механотронного преобразователя перемещений с чувствительностью i = "iy и-1И = Пиу и диапазоном измеряемых перемещений щах - Утах- При проектировании механотронных преобразователей углов поворота, кинематическая система которых обычно выполняется в виде жесткой балки, укрепленной на «мягком» торсионе (см. табл. 1.3), прежде всего определяются конструктивные параметры указанной системы: рабочая длина и диаметр dr торсиона, расстояние / от оси торсиона до центра тяжести инерционной массы М и значение последней (см. табл. 1.3). Исходными данными для расчета кинематической системы являются: чувствительность преобразователя по току Т1 ;j или по напряжению Т1цв к углу поворота, диапазон измеряемых углов от до тах и чувствительность или электродной системы механотрона (табл. 2.1). При расчете кинематической системы преобразователей малых углов поворота (Эал- 10-20°), имеющих паибольщее практическое значение, используется следующее уравнение, которое легко получить из (2.34, а, б): (2.54) Размеры кинематической системы (/, dt, АЦ обычно выбираются из конструктивных и габаритных соображений. В качестве материала торсиона, как правило, используются тугоплавкие металлы (вольфрам, молибден н др.). с известными значениями модуля сдвига G. Далее, используя (2.54), рассчитывают инерционную массу Р. Расчет электродных систем механотронов. Расчет конструктивных параметров электродных систем диодных механотронов продольного управления сводится к определению межэлектродного расстояния анод-катод и активной поверхности катода. Исходными данными при этом являются чувствительность Ч,- системы по току к перемещениям подвижного электрода, диапазон перемещения подвижных электродов Айщцх и анодное напряжение t/a механотрона. Уровень параметров электродной системы "F;, j\, и Гк зависит от назначения механотрона. В механотронах, предназначенных для высокоточных длительных и непрерывных измерений, значения Уа. Ия и 7к целесообразно выбирать сравнительно небольшими, в то время как в механотронах, предназначенных для кратковременных измерений, допустимы более высокие значения этих параметров. Рекомендуемые значения указанных параметров для диодных и триодных механотронов первого и второго типов даны в табл. 2.2. Начальное межэлектродное расстояние rfg .д, активная поверхность катода &к, плотность анодного тока /а и чувствительность 84 Назначение .механотрона Максимальное значение анодного напряжения и„, В s tu 2 "I « >< H ч 3 о ч в = Чувствительность X § 2 g a 5S& Высокоточные длительные и непрерывные измерения медленно изменяющихся механических сигналов 1000-1100 Ю-60 1-1,5 30-50 0,2-0,5 Кратковременные измерения быстро-изменяющихся механических сигналов illOO-1150 100-120 12-3 180-150 [0,8-2 4i диодной электродной системы продольного управления, как известно, связаны между собой соотношением (1.34); ч ~ , "а.кО Из формулы (1.34) очевидно, что заданная чувствительность диодного механотрона может быть получена как при очень малых, так и при сравнительно больших значениях d и 8к- Увеличение активной поверхности катода, как правило, связало с повышением мощности, потребляемой на накал механотрона, а следовательно, с повышением температуры деталей и уровня теп-.ловых нестабильиостей преобразователя. В связи с этим предпочте-;ние следует отдавать более экономичным механотронный системам С малы.м межэлектродным расстоянием, в которых удается получить весьма высокую эффективность использования анодного тока. Однако при этом необходимо учитывать, что для обеспечения стабильной работы диода в режиме пространственного заряда наи-лленьшее межэлектродное расстояние d „а„„ должно быть больше т1редельно-допустимого значения di, определяемого для данных t/a и Тк из зависимостей f/a5 =/(rfgj) (см. рис. 1.5). Наименьшее межэлектродное расстояние а, возникает в процессе работы механотронов продольного управления при наибольшем сближении его электродов, например при перемещении подвижного анода в направлении к катоду на Admax- Таким образом, для большинства конструкций механотронов а.к.наи ,м = а.кО~Д d...... а.кО - d„ax > а.к min, (2.55) (2.56) где Ad соответствует верхнему пределу измеряемой механотроном механической величины. В диодных механотронах продольного управления начальная величина „ о межэлектродного расстояния из конструктивных соображений должна удовлетворять также условию flfa.KO > Ad + Логр, (2.57). где Adax-максимальное перемещение подвижного электрода в рабочем диапазоне; ftorp -высота ограничителя перемещений подвижного электрода (рис. 2.5). Обычно ftorp=0,l-0,3 мм. Следует отметить также, что чрезмерное уменьшение межэлектродных расстояний влечет за собой значительные трудности монтажа механотронов, так как при этом возрастает вероятность перекосов и заклинивания подвижных электродов приборов. В связи с вышесказанным начальное расстояние анод - катод в диодных механотронах следует выбирать большим 0,2 мм. При этом основным соотношением, которое используется для определения dgg является (2.57). Условие (2.56) применяется для контрольной проверки. После определения межэлектродного расстояния о выбираются f/*> (табл. 2.2) и рассчитываются значения Уа и 5к- Для расчета плотности анодного тока /а используются номограммы рис. 1.8-1.10. По выбранным значениям 7"к, d и U, используя формулы (1.30) и (1.31), рассчитываются U и 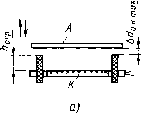 >с1
К С Рис. 2.5. Ограничение перемещений подвижных электродов в диодных и триодных механотронах продольного управления: а - диод с подвижным анодом; б -триод с подвижным анодом; s -трнод с подвижной сеткой; г - триод с подвижными анодом н сеткой *) При выборе Ua необходимо учитывать контактную разность потенциалов t/,j p которая, как известно, уменьшает действующее напряжение между оксидным катодом и анодом в приборе. 86 UalUr, а также для данной определяется плотность тока эмиссии катода Js (см. рнс. 1.6). Затем по нормированным диодным характеристикам определяется отношение Уа/уоо и далее - ллотность анодного тока /а. После определения / а по формуле (1.34) рассчитывается активная поверхность катода S. Если полученное значение /а значительно отличается от данных табл. 2.2, следует повторить расчет, предварительно изменив один из исходных параметров. Прн расчете внутреннего дифференциального сопротивления диодного механотрона можно воспользоваться формулой (1.25), подставив в нее рассчитанное ранее значение анодного тока По известным параметрам и Ri, используя уравнение (1.26), легко определить чувствительность электродной системы по напря- 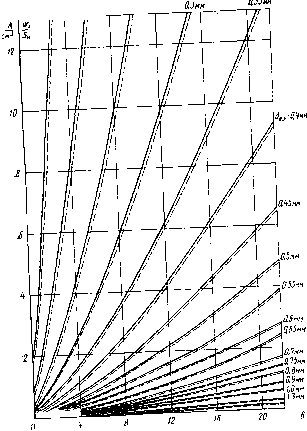 1дм» ц Рис 6 зависимости F./Sf(t/a) при d,.,=var для Ги=1000К ( ) и Тн=1100К (--) 37 [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [ 13 ] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] 0.0128 |