
|
|
|
Главная страница Механотроны [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [ 24 ] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] 32 26
12 ts 20 241 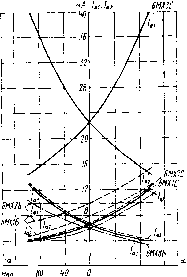 Рис. 4.1. Анодные характеристики диодных мехаяетреяных преобразователей перемещений и усилий 40 за Рис. 4.2. Статические характеристики перемещения механотронов 6МХ1С, 6МХЗС, 6МХ7С, 6МХ1Б, бМХаВ и 6МХ8Б
тп 2000 t200 800 400 а 400 1200 teoa Рнс. 4.3. Статические характеристики перемещения механотронов 6МХ4С, 6МХ5С, 6МХ10С
Рис. 4.4. Статические динамометрические характеристики механотронов 6МХ1Б, 6МХ2Б и 6МХ1С,
а. Kim Рис. 4 5. Рабочие характеристики перемещения механотронов 6MXIC, 6МХ4С, 6МХ5С н e.vixioc Рис. 4.6 Изменение выходного сигнала во времени для механотрона 6МХ1С собственных колебаний /о его кинематической системы, по которой определяется частотный диапазон переменных сигналов, измеряемых механотроном без резонансных искажений. В табл. 4.3 приведены значения частоты fo кинематических систем механотронов. Частота [о определялась на специальном вибростенде для двух типов крепления механотронов: со свободным штырем и с жестко закрепленным штырем [4]. Следует отметить, что второй случай крепления обычно ближе к реальным условиям эксплуатации механотронов. Как видно из табл. 4.3, освобождение штыря механотрона от закрепления приводит к значительному снижению частоты /о его кинематической системы. Наибо- Таблица 4.3 Частота собственных колебаний кинематических систем механотронных преобразователей перемещений и сил
лее высокой частотой собственных колебаний обладают кинематические системы механотронов 6МХ9Б и 6МХ1Б с закрепленным штырем. Высокая частота кинематической системы этих механотронов выгодно сочетается с их высокой чувствительностью по току к силам. Рассмотренные механотронные преобразователи предназначены прежде всего для высокоточных измерений линейных перемещений (линейных размеров) и усилий. При контроле линейных перемещений с помощью механотронов точность измерений может быть доведена до 0,1 мкм, а при контроле усилий - до Ю-"* сН. Кроме рассмотренных диодных механотронов для измерения перемещений и сил серийно выпускается сверхминиатюрный триодный механотрон 6МН1Б [49], который в отличие от диодных механотронов обладает высокой чувствительностью не по току, а по напряжению и высоким внутренним сопротивлением. Этот меха- нотрон выполнен в виде сдвоенного триода с общими неподвижным катодом, неподвижной управляющей сеткой, одним подвижным и вторым неподвижным анодами (см. рис. 2.10,6). Внешне механотрон 6МН1Б напоминает механотрон 6МХ2Б. Его основные параметры приведены в табл. 4.4. Для сравнения в этой же таблице приведены параметры известного триодного механотрона типа RCA-5734 (США) [1]. Таблица 4.4 Основные параметры триодных механотронов типов 6МН1Б и RCA-5734 Название параметра Савоенный триодный механотрон 6МН1Б Триодный механотрон RCA-573t Напряжение накала, В Ток накала, мА Номинальное анодное напряжение, В Сеточное напряжение, В Ток каждого аиода, мА Диапазон измеряемых перемещений, Чувствительность по напряжению к перемещениям, мВ/мкм Внутреннее сопротивление, кОм Нелинейность выходной характеристики в рабочем диапазоне переме-и1ений, % Нестабильность выходного сигнала во времени, мкм/ч Чувствительность к изменению температуры окружающей среды, mkm/°C Собственное измерительное усилие, сН Внешнее оформление 6,3 200 100 -1-2,5 1,5+0,5 ±100 Не менее 200 25 Не более 2 Не более 0,1 Не более 0,2 Не более 30 Сверхминиатюрное с гибкими выводами 6,3 150 250 О ±250* 50 4 Сверхминиатюрное с гибкими выводами • Для облегчения сравнения параметров триодных механотронов эти параметры приведены к длине штыря механотрона, равной 30 мм. При работе механотрон 6МЫ1Б обычно включается в мостовую измерительную схему, изображенную на рис. 3.2,6. На рис. 4.7 и 4.8 представлены типичные статические характеристики триодного механотрона 6МН1Б. Его выходные характеристики практически линейны в рабочем диапазоне измерений. Благодаря высокому внутреннему сопротивлению тр йодный механотрон 6МН1Б целесообразно использовать для оснащения аппаратуры, требующей от первичных преобразователей высокого внутреннего сопротивления, а также для многих моделирующих и электронно-вычислительных машин. Сдвоенный триодный механотрон с двумя подвижными анодами (см. рис. 2.10,а) разработан на базе ка-тодно-сеточного узла механотрона 6МН1Б. Механотрон отличается высокой чувствительностью (0,5-0,8 В/мкм) и практически линейной выходной характеристикой [1]. Этот триодный механотрон снабжен октальным цоколем и внешне напоминает механотрон 6МХ1С. Механотрон типа 6МУХ6П позволяет измерять углы поворота в диапазоне ±5° объектов с горизонтальной осью вращения. Он представляет собой сдвоенный диод поперечного управления с двумя подвижными анодами, укрепленными внутри баллона прибора на торсионном подвесе. Механотрон имеет чувствительность по току к углу поворота не менее 1 мА/град при анодном напряжении 10-20 В [4]. Статические и рабочие угловые характеристики механотрона 6МУХ6П практически линейны во всем диа- мА I, 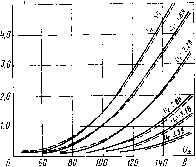
МИМ 80 40 W 80 пкм Рис. 4.7. Анодно-сеточиые харак- Рис. 4.8. Статические характе- теристики триодного механотрона ристики перемещения триодно-6МН1Б го механотрона 6МН1Б пазоне измеряемых углов, что характерно для механотронов поперечного управления. Следует отметить также сравнительно малое время начального дрейфа (около 1 мин) и весьма низкую чувствительность преобразователя к изменению температуры окружающей среды (менее 0,1 угл. мин/°С), что свойственно механотронам с внутренней кинематической системой (с внутренним управлением). 4.2. ДВУХКОМПОНЕНТНЫЕ (ДВУХКООРДИНАТНЫЕ) МЕХАНОТРОННЫЕ ПРЕОБРАЗОВАТЕЛИ ПЕРЕМЕЩЕНИЙ И УСИЛИЙ В двухкомпонентных механотронных преобразователях перемещений и усилий (рис. 2.12) используются две степени свободы кинематической системы типа мембрана-стержень. При этом механотрон содержит две двух-катодные механотронные системы продольного управления с общим анодом, причем плоскости электродов обеих механотронных систем ориентированы перпендикулярно друг другу. Каждая механотронная система обладает максимальной чувствительностью только в одном направлении: при перемещении анода перпендикулярно плоскостям ее электродов, что и используется при регистрации плоскостного вектора перемещения (или силы) по результатам измерения двух его составляющих в прямоугольной системе координат. Разработаны два типа двухкоординатных механотронов с диапазонами измеряемых перемещений по каждой из двух осей координат ±100 мкм и ±200 мкм. Механотрон с диапазоном измеряемых перемещений ±100 мкм имеет следующие основные параметры: Диапазон измеряемых усилий по каждой из двух осей координат, сН........... ±5 Анодное напряжение, В......... 12-25 Ток каждого катода, мА......... 4-6 Напряжение накала, В......... 6,3 Ток накала (при параллельном соединении подогревателей катодов), мА.......... 450-580 Статическая чувствительность по току к перемещению подвижного анода (для каждой из двух координат), мкА/мкм, не менее........ 8-10 Статическая чувствительность по току к силам (для каждой из двух осей координат), мкА/сН, не менее 250 Внутреннее сопротивление каждого межэлектродного промежутка, кОм.......... 2,6-3,0 Частота свбствеииых колебаний кинематической системы с закрепленным штырем, Гц....... 620-760 [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [ 24 ] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] 0.0129 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||