
|
|
|
Главная страница Механотроны [0] [1] [2] [ 3 ] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] одного механотрона {U - напряжение на управляющей сетке). Рассматривая продольное управление электронным током и переходя к частным производным, получаем: Так как в случае диодного и триодного механотронов продольного управления Ad=--d-do, где do и d - соответственно начальное и полное расстояние между электродами, причем do -величина постоянная, то выражения для ЧР,-(д) и можно переписать в виде: tU)-=dfJdd (1.7) и W,,) = d/,ldd. (1.8) Под чувствительностью по напряжению к перемещению понимается отношение приращения анодного напряжения AU механотрона к вызвавшему его перемещению подвижного электрода АП при постоянном анодном токе: *«(д,т) = Да/Д/ при /,=COnSt. Этот параметр в случае механотронов продольного управления аналогично (1.7) и (1.8) можно представить в виде uU,r) = dUJdd. (1.9) Внутренним сопротивлением механотрона называется отношение изменения анодного напряжения к соответствующему изменению анодного тока при постоянном межэлектродном расстоянии. Следовательно: Ri = dU,ldI,. (1.10) Из (1.7) - (1.10) легко получить уравнение, связывающее основные параметры электродной системы механотрона: u = -R-i. (1.11) Так как чувствительность механотрона по току Ч,-оказывается прямо пропорциональной анодному току, а его чувствительность по напряжению прямо пропорциональна приложенному напряжению [4], то одновременное увеличение ЧР",- и ЧРц, очевидно, сопровождается значительным возрастанием мощности, рассеиваемой внутри прибора. Это приводит к тепловым перегрузкам электродов механотрона и увеличению тепловых нестабильностей преобразователя. В связи с этим разработка механотронов с высокой чувствительностью 22 по току и по напряжению одновременно практически нецелесообразна. Одно из основных требований, предъявляемых к ме-ханотрону, - высокая чувствительность либо по току, либо по напряжению. При этом механотроны с высокой чувствительностью по току отличаются малым внутренним сопротивлением, в то время как механотроны с высокой чувствительностью по напряжению имеют большое внутреннее сопротивление. За основную статическую характеристику механотронной системы принимается зависимость анодного тока от межэлектродного расстояния d, которое изменяется при перемещении подвижного электрода, зависимость получена при неизменных напряжениях на электродах; для диодного механотрона /,=/(rf) при = const, (1.12) для триодного механотрона /з=/(а() при i/, = const и t7c = const. (1.13) Для механотронных систем с высокой чувствительностью по напряжению иногда используется также зависимость U,-f{d) при Уз = const. (1.14) Характеристики (1.12) -(1.14) часто сокращенно называют характеристиками перемещения механотронных систем. Статическая электронно-механическая характеристика механотрона в целом, т. е. зависимость анодного тока (или напряжения) от действующего механического сигнала (силы, давления, ускорения и т. д.), может быть получена путем графического сложения соответствующей характеристики перемещения механотронной системы и основной характеристики кинематической системы. 1.3. ОСНОВНЫЕ ТИПЫ ЭЛЕКТРОДНЫХ СИСТЕМ ВАКУУМНЫХ МЕХАНОТРОНОВ, ИХ СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ И ПАРАМЕТРЫ Из известных электродных (механотронных) чувствительных систем вакуумных механотронов наибольшее распространение на практике нашли диодные механотроны продольного управления с плоскопараллельными 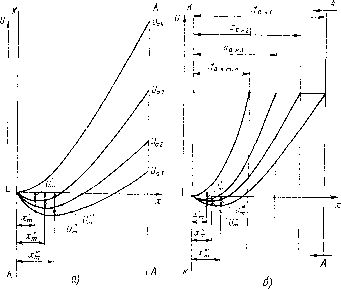 Оаcanst Рис. 1.4. Изменение величины и положения минимума потенциала » плоском диоде при изменении анодного напряжения (а) и расстояния анод-катод (б) электродами. На примере этих механотронов в данном разделе подробно рассматриваются особенности работы и методы расчета статических характеристик и параметров электродных систем механотронов. Статические характеристики и параметры электродных систем вакуумных механотронов других типов рассматриваются кратко в конце данного раздела. Физические процессы в диодном механотроне продольного управления. При работе диодных механотронов продольного управления используется зависимость анодного тока диода, ограниченного пространственным зарядом, от расстояния между катодом и анодом. Характерной особенностью области тока, ограниченного пространственным зарядом, как известно, является наличие минимума потенциала в пространстве анод - катод. Величина U* и положение х„ минумума потенциала (рис. 1.4) зависят от температуры и эмиссии катода, от действующего анодного напряжения и расстояния между анодом и катодом. Под понимается алгебраическая величина, т. е. Um=-\U„ В диодах с неподвижными электродами (при постоянных температуре и эмиссии катода) величина и положение минимума потенциала полностью определяются значением анодного напряжения V. С уменьшением i/a поверхность минимального потенциала перемещается в направлении от катода к аноду, что сопровождается одновременным увеличением модуля (рис. 1.4,а). Значение U, при котором поверхность минимума потенциала совпадает с поверхностью анода, будем называть «граничным» и обозначать f/a.rp. Очевидно, t/a.rp всегда будет величиной отрицательной. Как известно, режим работы диода с пространственным зарядом ограничен двумя предельными значениями анодного напряжения. Значения Ua<Ua,rp соответствуют области начального тОка. В этой области движение электронов на протяжении всего их пути происходит в тормозящем электрическом поле. Анодный ток создается благодаря наличию у некоторых электронов начальных скоростей, достаточно больших для преодоления тормозящего поля. Если анодное напряжение превышает напряжение насыщения U, все электроны, эмиттируемые катодом, попадают на анод. При 11=1] поверхностьминимального потенциала совпадает с поверхностью катода. Значениям >• U соответствует режим работы диода в области насыщения. Анодный ток в режиме насыщения равен току эмисии катода: = (1.15) причем увеличение или уменьшение 4 может происходить только за счет соответствующего изменения 4 силу каких-либо причин (изменение температуры катода, влияние электрического поля на работу выхода катода и т. п.). Поскольку как в области начальных токов, так и в области насыщения анодный ток практически не зависит от расстояния анод - катод, то оба эти режима не могут быть использованы при работе диодного механотрона продольного управления. Режим начальных токов в указанном механотроне практически не встречается, поскольку, как правило, t/a >0. Более вероятным при работе механотрона является переход из области токов, ограниченных пространственным зарядом, в область насыщения. Поясним это. в диодном механотроне продольного управления изменение величины и положения минимума потенциала может происходить не только при изменении значения анодного напряжения, но и при перемещении подвижного электрода. При постоянном анодном напряжении уменьшение расстояния между анодом и катодом (вследствие перемещения подвижного электрода), как видно из рис. 1.4,6, приводит к смещению минимума потенциала в направлении к катоду и к уменьшению его величины. При некотором весьма малом межэлектродном расстоянии заданное анодное напряжение становится достаточным для перехвата анодом всех электронов, эмит-тируемых катодом, что, как известно, характерно для области насыщения. В этом случае плоскость минимального потенциала совпадает с плоскостью катода (рис. 1.4,6), и режим работы механотрона из области пространственного заряда переходит в область насыщения. При постоянной температуре и эмиссии катода каждому значению анодного напряжения соответствует некоторое минимальное расстояние анод-катод rfa.Kmm при котором заданное анодное напряжение становится напряжением насыщения t/g. Семейство зависимостей а4 = /(а.ктм при Гк = = const, рассчитанное для диапазона температур, в котором работает оксидный катод, приведено на рис. 1.5. Значения flfa. и для точек, расположенных выше 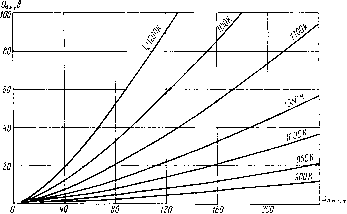 й/7 /ihtf Рис. 1.5. Зависимости Usfid.. min) при 4 = const кривой U!,s=f(di,Kmin) соответствуют работе механотрона в области насыщения, т. е. в недопустимом режиме. Таким образом, каждая зависимость = f{d,„i„) является как бы верхней границей допустимых режимов механотронов при заданной Т. На рис. 1.6 приведена зависимость плотности тока эмиссии оксидного катода от его температуры Js=/iK) построенная по данным [22], которая использовалась при расчете кривых Uas-f{dKmin)- Следует отметить, что в реальных условиях за счет влияния электрического поля на работу выхода и эмиссию катода (эффект Шотки) анодный ток механотрона зависит от расстояния анод-катод и в режиме насыщения. Из-за неравномерности распределения температуры вдоль катода, неровности его поверхности, а также возможных перекосов электродов при сближении последних насыщение наступает на одних участках поверхности катода раньше, чем на других. В связи с этим переход к насыщению происходит не резко, а по- степенно: обычно ему соответствует область перемещения подвижного электрода порядка 100-200 мкм. Вследствие большого токоотбора с катода, напряженного теплового режима электродов прибора работа механотрона как в области насыщения, так и в области, близкой к насыщению, становится крайне нестабильной. В связи с вышесказанным при правильном выборе ра- Рис. 1.6. Зависимость тока эмиссии от температуры для оксидного катода is =f (7"к)
[0] [1] [2] [ 3 ] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] 0.0138 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||