
|
|
|
Главная страница Механотроны [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [ 26 ] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] s: ч .S •О S Ч1Э0НЧ1ГЭ1ИЯХЭЯХЬ 0U BdiawodairaDMB Ч1Эонч1гэхна1ЭяХь
иол HMEidJEH IJOHirOHB эин -9iraHiodno3 уи В1Г0НВ 0Д01ГЖВ>1 яох goHHOHUdaHH ээд •НИЭ1ЭИЭ ноиээь -ИХВИЭНИН UHJ
J BdoQHdn BDDBW (BHHirir - 7 dxan -ВИИ - p) Hdaw -SBd SMHxHdegBj ниахоиэ goHirodxMsire них Bdxsiv -odsirsDHB dsHOH S о a. in CO - Чоо O и fl о s I a: я s s I So о - g° II II S.g< II II Soa, Qaa, gf Si a. a. ьгг в a. с a.
товленного на базе механотронных преобразователей перемещений типов 6МХ1Б и 6МХ2Б. Как отмечалось выше, механотроны 6МХ1Б и 6МХ2Б имеют сверхминиатюрное оформление и представляют собой сдвоенные диоды с общим неподвижным катодом косвенного накала и одним подвижным, а вторым неподвижным анодом. Эти механотроны содержат (рис. 4.17) мембрану 1, в которую впаян (или вварен) стержень 2, подогревный оксидный катод 3 (подогреватель 8), неподвижный анод 4 и подвижный анод 5, л-сестко соединенный со стержнем 2. Мембрана механотрона соединяется с баллоном 6 посредством металлического фланца 7. На внешней части стержня - штыре механотрона укреплена инерционная масса 9. Для уменьшения времени затухания кинематической системы акселерометров применено демпфирование. При этом штырь механотрона с укрепленной на нем инерционной массой помещается в баллон 10, который предварительно приклеивается к фланцу механотрона 7 эпоксидной смолой. Затем в баллон 10 наливается демпфирующая жидкость (например, силиконовое масло), после чего баллон закрывается крышкой 11, причем корпус баллона и крышка уплотняются посредством эластичной прокладки 12. Благодаря применению демпфера время затухания кинематической системы акселерометра удалось уменьшить с 1-1,5 до 0,05 - 0,07 с. Акселерометр включается по мостовой схеме, содержащей анодные нагрузки Ra, регулирующие резисторы и Rp, источники питания анодов и накала и Е„, выходной отсчетный прибор ИП. Преимуществом акселерометров с внешним механическим управлением является не только простота демпфирования кинематической системы прибора, но и возможность регулировки его чувствительности и диапазона измерений либо путем замены инерционной массы, либо путем изменения ее положения на штыре механотрона. Для описанных акселерометров с внешним управлением на рис. 4.18 и 4.19 приведены градуировочные кривые - зависимости тока в цепи выходного прибора мостовой схемы от ускорения в диапазонах О-0,lg; 0-1; О-lOgf и О-50g-, полученные для двух значений инерционных масс М = 0,96 г и М = 0,56 г (кроме диапазона О-50). При этом в диапазонах 0-10 и О-50 целесообразно использовать механотрон 6МХ2Б, а в диапазонах О-0,lg- и О-Ig - механотрон 6МХ1Б, обладающий большей чувствительностью к силам, чем механотрон 6МХ2Б. Крутизна градуировочных кривых равна рабочей, чувствительности по току к ускорению акселерометров /мост (а), которая зависит не только от типа механотрона, примененного в акселерометре, но и от величины инерционной массы (рис. 4.20), а также от расположения ее на штыре механотрона. Параметры этих акселерометров даны в табл. 4.7.
0,04 0,08 д а) 0,8 д Рис. 4.18. Градуировочные кривые одного из образцов акселерометра с внешним управлением на базе механотрона 6MXiliB (М - инерционная масса): а -диапазон ускорений О-O.lg; б -диапазон ускорений О-Ig
8 д Рис. 4.19. Градуировочные кривые одного из образцов акселерометра иа базе механотрона 6МХ2Б (М - инерционная масса): а - диапазон ускорений О-10; б - диапазон ускорений О-50g о о. н о о.
Нелинейность градуировочных кривых механотронных акселерометров в рабочих диапазонах, как правило, не превышает 2-3%. Помимо чувствительности Чгмост(а) важным параметром акселерометров является частота собственных колебаний кинематической системы fo, которая может быть определена из частотных характеристик механотронов (табл. 4.3). При этом наиболее надежные и стабильные показания акселерометра обеспечиваются в диапазоне частот, верхний предел которого в 2-3 раза меньше частоты fo- SMX16 (при л32ни) 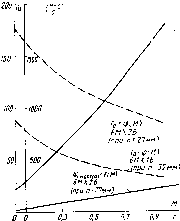 Величина fo зависит от жесткости кинематической системы механотрона, значения инерционной массы, а также от расположения ее на штыре механотрона (рис. 4.20). Рис. 4.20, Типичные зависимости чувствительности /мост (а) " резона«сной частоты fo от инерционной массы М для акселерометров иа базе механотронов 6МХ1Б и 6МХ2Б 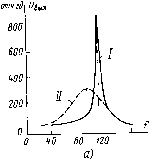 бтнед. 1200 т Гц о 0,1 0,2 0,3 O.-i с 6) Рнс. 4.21. Влияние демпфирующего устройства на форму резонансной кривой [а) и на изменение выходного сигнала (б) механотронных акселерометров с внешним управлением (/ - без демпфера, - с демпфером) Рисунок 4.21,а иллюстрирует влияние демпфера на частотную характеристику акселерометра с внешним управлением: наличие демпфера уменьшает величину резонансного пика, увеличивает его ширину и незначительно снижает /о. На рис. 4.21,6 показаны типичные кривые затухания выходного сигнала акселерометра после ударного кратковременного воздействия на него, записанные на шлей-фовом осциллографе, причем кривая / соответствует акселерометру с демпфером, а кривая - без демпфера. Из рассмотрения кривых рис. 4.21,6 преимущества механотронного акселерометра с демпфирующим устройством очевидны. Из сравнения данных табл. 4.6 и 4.7 следует, что в механотронных акселерометрах с внутренним управлением удается обеспечить более высокую чувствительность, чем у акселерометров с внешним управлением (примерно при одинаковых габаритных размерах и массе приборов). Однако в отношении удобства эксплуатации механотронные акселерометры с внешним управлением превосходят акселерометры с внутренним управлением. Так, время установления выходного сигнала (время успокоения) у акселерометров с внешним управлением, снабженных демпфером, значительно меньше, чем у акселерометров с внутренним управлением, у которых очень сложно осуществить демпфирование кинематической системы. Кроме того, механотронные акселерометры с внешним управлением допускают в готовом приборе корректировку частоты /о и чувствительности Чгмост(а) только изменением расположения инерционной массы на штыре механотрона, что является чрезвычайно важным для ряда применений этих приборов. В механотронных акселерометрах с внутренним управлением подобная корректировка частоты весьма затруднительна и связана, как правило, с существенным усложнением всего устройства. Описанные выше механотронные акселерометры имеют сравнительно низкие значения частоты /о (от 20 до 200 Гц) и могут быть использованы для регистрации медленно изменяющихся процессов (например, сейсмических волн, процессов торможения и ускорения на транспорте и т. п.). [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [ 26 ] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] 0.0123 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||