
|
|
|
Главная страница Механотроны [0] [1] [2] [3] [4] [5] [6] [7] [8] [ 9 ] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40]
Рис. 1.18. Зависимости ар = = !(0ш/0с) При A=const, применяемые для определения чувствительности системы мембрана-стержень в случае тонких эластичных мембран но. Как показал опыт, при этом расчетные данные отличаются от экспериментальных характеристик систем не более чем на ±15%. При достаточно малых углах отклонения стержня (0<2°) механический гистерезис системы мембрана-стержень очень мал (много меньше 1%) и практически не сказывается на ее работе. Уменьшению гистерезиса способствует действие на систему атмосферного давления, которое натягивает и расправляет мембрану механотрона [4]. Уменьшение механического гистерезиса системы мембрана-стержень (меньше 1%) достигается при выполнении условия [4] (1.40) где п - длина штыря механотрона; аох-верхний предел измеряемых механотроном перемещений; 0пред - предельный угол отклонения, при котором механический гистерезис системы не превосходит 1%, причем обычно бпред = 1,5-2°. Для механотронных преобразователей перемещений и сил, предназначенных для измерения быстроизменяющихся процессов (например, для измерения шероховатости поверхности деталей в профилометрии) важным параметром является частота fo собственных колебаний (резонансная частота) кинематической системы мембрана-стержень. При проектировании подобных преобразователей необходимо стремиться к получению достаточно высокой fo, которая должна в несколько раз (обычно в 3-5 раз) превышать частоту контролируемого процесса. В связи с этим рассмотрим возможности повышения резонансной частоты fo кинематической системы мембрана-стержень. В большинстве случаев практического применения механотронных преобразователей перемещений и усилий конец штыря достаточно прочно связан с контролируемым объектом, например, с помощью упругого сочленения. При этом внешнюю часть стержня механотрона можно рассматривать как балку круглого сечения, шарннрно укрепленную на концах. Внутренюю часть стержня будем рассматривать как консольную балку, один из концов которой жестко связан с мембраной. Для расчета основных резонансных частот внешней цилиндрической части стержня и его внутренней части, выполненной либо в виде цилиндра, либо в виде конуса, основание которого закреплено на мембране (рис. 1.19), можно воспользоваться формулами, приведенными в [35, 36]. Для внешней части стержня, выполненного в виде балки, шарннрно закрепленной на концах. кг /о бал (с) - (1.41) для внутренней части стержня, выполненного в виде цилиндрической консольной балки. 21 Е 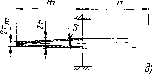 где fi--S-i-2 Рнс. 1.19. Варианты конструкций кинематической системы мембрана-стержень с различной частотой /о собственных колебаний внутренней т части стержня l,758r Г~~Ё для внутренней части стержня, выполненного в виде конической консольной балки, 4.359Г r-Y (1.43) В этих формулах: пи т - соответственно длина внешней и внутренней частей стержня; Е и р - модуль упругости и плотность материала стержня;/ -радиус цилиндрического стержня и радиус основания конического стержня. Принимая т=/г, определяем отношения частот Д (,,), .Оц(с) " /ок(с) = /о бал (с) /ои(с) 2.1,758 2,8; к (с) /о ц (с) 2,5; /о бал (с) /о к (с) 1,1. Анализируя эти выражения, можно сделать следующие выводы: 1) резонансная частота закрепленной внешней части стержня (штыря механотрона) всегда выше резонансной частоты внутренней части стер.жня, причем отношение этих частот тем больше, чем больше длина (т=п) и радиус основания (г) указанных частей стержня; 2) резонансная частота внутренней части стержня, выполнеи-ной в виде конуса, приблизительно в 2,5 раза выше резонансной частоты этой части стержня, выполненной в виде цилиндра. Таким образом, наиболее низкой резонансной частотой обладает внутренняя часть стержня механотрона с закрепленным штырем. Именно эта частота и определяет рабочий частотный диапазон механотронного преобразователя перемещений. На рис. 1.19 приведены некоторые варианты системы мембрана-стержень, отличающиеся друг от друга конструкцией внутренней консольной части стержня. На этом же рисунке даны приближенные, полученные на основе использования метода Рэлея [35] формулы для расчета резонансных частот консольных стержней, выполненных в виде сплошного цилиндра (рис. 1.19,а), сплошного конуса (рис. 1.19,6), тонкостенной цилиндрической трубки (рис. 1.19,в) и усеченного полого конуса (рис. 1,19,г и д). Из конструкций, приведенных на рис. 1.19. наиболее высокой резонансной частотой обладает полый стержень, внешняя поверхность которого образована усеченным конусом, а внутренняя - цилиндром (рис. 1.19,г). Применением полого цилиндрического стержня (рис. 1.19,в) вместо сплошного цилиндрического стержня удается обеспечить повышение резонансной частоты в реальных механотронах более чем в 2 раза (при г/го=0,9). * Индексом с здесь и далее подчеркивается, что данные обозначения резонансных частот Д g, (j,, (), Д (.j относятся к сплошным монолитным стержням, в отличие от полых трубчатых стержней, где применяется индекс «п». ГЛАВА ВТОРАЯ РАСЧЕТ И КОНСТРУИРОВАНИЕ МЕХАНОТРОННЫХ ПРЕОБРАЗОВАТЕЛЕЙ 2.1. ОСОБЕННОСТИ РАБОТЫ МЕХАНОТРОННЫХ ПРЕОБРАЗОВАТЕЛЕЙ Преобразователь перемещений. В преобразователе перемещений входной механический сигнал - перемещение а, подаваемый на внешний конец стержня меха- 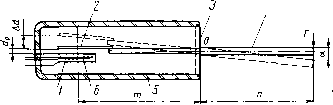 Рис. 2.1. Кинематическая система мембрана-стержень механотронного преобразователя перемещений и усилий: / - катод; 2-анод; 3 -мембрана; 4-стержень; 5-баллон; б -подогреватель катода, - начальное межэлектродное расстояние катод-анод; F - сила, воздействующая на конец В штыря; а - перемещение конца В штыря;. 4d - перемещение анода от воздействия силы F нотрона (рис. 2.1), преобразуется в перемещение под-вижного электрода Ad таким образом, что (2.1> Ad =-а, где т и п - длина соответственно внутренней и внешней частей стержня. Очевидно, что при этом Ad может быть больше, меньше или равно а, а чувствительности механотрона по току и по напряжению к перемещению конца его штыря определяются следующими соотношениями: (2.2> Т. п > где и W„ - соответственно чувствительности по току и по напряжению электродной системы механотрона. Кинематическая система механотрона представляет-собой двухплечий рычаг (рис. 2.1) с упругой опорой в точке О. Измерение с помощью механотронного микрометра осуществляется контактным способом. При этом штырь механотрона приводится в контакт с контролируемым объектом, и на нем создается так называемое собственное измерительное усилие, величину которого можно регулировать с помощью нагрузочных и разгрузочных приспособлений. Величина собственного измерительного усилия Р„ механотрона зависит от чувствительности Ор по перемещению к силе кинематической системы мембрана-стержень. Кроме того, Р„ зависит также от относительного расположения электродов в механотроне после его изготовления. Например, в двуханодном диодном механотроне после его изготовления аноды располагаются несимметрично относительно катода (один из анодов ближе к катоду, чем другой). Поэтому при включении механотрона токи его анодов не равны друг другу, а в измерительной мостовой схеме наблюдается разбаланс моста. Для того чтобы сбалансировать указанную схему (установка микрометра или динамометра «на нуль»), необходимо уравнять анодные токи механотрона, что достигается начальным смещением ао его штыря при прижатии последнего к объекту. Начальному смещению штыря Оо соответствует, очевидно, определенное смещение анодов в механотроне Дао и определенное измерительное усилие Рм- При этом собственное измерительное усилие механотрона может быть определено следующим образом: (2.4) (2.5) где Ор определяется из выражения, приведенного в табл. 1.3. Величину Рм можно сделать очень малой. Следует, однако, отметить, что применение механотрона с очень малыми значениями измерительного усилия, близкими к нулевому (Р„ 0), весьма затруднительно, а иногда и невозможно из-за нестабильности («плавания») контакта штыря механотрона с контролируемым объектом, а также из-за повышенной чувствительности прибора к вибрации и отдельным сотрясениям. Поэтому 62 при изготовлении, например, двуханодных диодных механотронов их аноды преднамеренно располагаются несимметрично относительно катода. В реальных механотронах Р„ может быть сделано от 0,1 до 70 сН. Столь небольшие измерительные усилия позволяют успешно использовать механотроны при измерении размеров легко деформирующихся деталей и материалов. В преобразователе сил мембрана выполняет роль динамометрической пружины, и входной механический сигнал -сила F (рис. 2.1) преобразуется в перемещение подвижного электрода Ad следующим образом: ud=apF. (2.6) Основными статическими параметрами механотронного преобразователя сил являются его чувствительности по току и по напряжению к силам -qip и jaf, которые определяются как частные производные от анодного тока или от анодного напряжения по силе: 4tF=- (2.7) dF dF (2.8> Учитывая процесс преобразования входного сигнала F в механотронном преобразователе сил, согласно выражению (1.2) имеем ViF = lOp (2.9> и ri,p = WGp. (2.10> Основными параметрами механотронного преобразователя давления (манотрона) являются его чувствительности по току и по напряжению к давлению, которые определяются как Чир = dp dp (2.11> (2.12> В соответствии с уравнением (1.2) для т;,/, и tj могут быть записаны следующие выражения: 4ip-=Vip (2.13). « V = «V (2.14> где Стр - чувствительность к давлению кинематической системы механотрона, которая определяется по форму- [0] [1] [2] [3] [4] [5] [6] [7] [8] [ 9 ] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] 0.0097 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||