
|
|
|
Главная страница Механотроны [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [ 15 ] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] Подогреватели И катодов, так же как и другие электроды, электрически соединяются с жесткими выводами 12 октального цоколя 13 (рис. 2.8,а) или с гибкими выводами 12 (рис. 2.8,6 и в) ножки механотронов. Во всех механотронах, кроме механотрона, изображенного на рис. 2.8,6, управляющие стержни электрически изолированы от подвижных анодов с помощью слюдяных или керамических изоляторов 14, причем электрический вывод этих анодов осуществляется через эластичные контактные пружинки 15. В механотроне, изображенном на рис. 2.8,6, подвижный анод непосредственно приварен к стержню, который вместе с фланцем и мембраной находится под потенциалом этого анода и является его электрическим выводом. Измеряемый механический сигнал (перемещение или сила) обычно воздействует на внешний конец стержня 3 - штырь механотрона, причем максимальная чувствительность преобразователя обеспечивается в том случае, когда направление механического сигнала, приложенного к концу штыря механотрона, перпендикулярно плоскости его электродов. Направление возникающего при этом перемещения штыря механотрона называется рабочим. В механотронных преобразователях перемещений и сил обычно предусматривается снижение чувствительности кинематических систем в нерабочем направлении перемещения штыря. Это достигается за счет применения специальной растяжки 16 - отрезка проволоки 016 мкм, концы которого приварены к краям фланца, а середина - к штырю механотрона Рис. 2.9. Конструкция механотронного преобразователя перемещений и усилий с трубчатым подвижным анодом 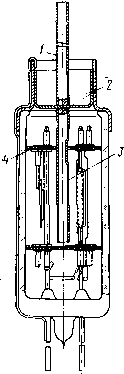 и который располагается в плоскости, параллельной анодам механотронов [42]. Благодаря наличию растяжки чувствительность системы мембрана-стержень в рабочем направлении перемещения штыря в 20-100 раз-превышает чувствительность этой системы в направлении, перпендикулярном рабочему. За счет этого удается значительно уменьшить восприимчивость механотрона к неконтролируемым механическим воздействиям в нерабочем направлении и тем самым повысить стабильность и надежность его показаний. В том случае, если к механотронному преобразователю перемещений и усилий наряду с требованием высокой чувствительности к силам предъявляется также-требование высокой резонансной частоты fo его кинематической системы, целесообразно воспользоваться конструкцией, изображенной на рис. 2.9 [43]. У этого механотрона подвижный анод 3 и штырь / выполнены 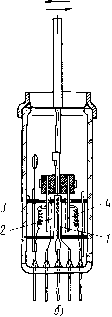 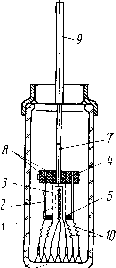 Рис. 2.10. Конструкции сдвоеииых триодных механотронов с одним (а) и двумя (б) подвижными анодами Рис. 2.11. Конструкция сдвоенного триодного механотрона с подвижными анодами и сетками в виде легких тонкостенных трубочек, что позволяет свести к минимуму массу кинематической системы и тем самым существенно повысить /о- Трубчатый анод 3 и штырь / соединяются с мембраной посредством коротких стерженьков 2, сваренных с мембраной «стыковой» электроконтактной сваркой. Такая конструкция механотрона имеет резонансную частоту кинематической системы, в несколько раз превышающую частоту fo конструкций механотронов, изображенных на рис. 2.8. В связи с этим описанную конструкцию особенно целесообразно применять при разработке механотронов, предназначенных для измерения быстроизменяющихся механических сигналов. Конструкции триодных механотронов, изображенные на рис. 2.10, в основном аналогичны описанным выше конструкциям диодных механотронов. Они выполнены в виде сдвоенных (двуханодных) триодов с общим неподвижным катодом /, неподвижной управляющей сеткой 2 п с одним или двумя подвижными анодами 3 я 4. На рис. 2.11 схематично изображен сдвоенный три-одный механотрон с общим неподвижным катодом ] и с двумя парами подвижных электродов, каждая из которых состоит из анода 2 и управляющей сетки 3, жестко скрепленных между собой изоляторами и 5. В -механотроне применены плоские сетки рамочной кон-Струкции. Все подвижные электроды укреплены на внутреннем конце стержня 9 посредством держателя 7. .Электрическая изоляция подвижных электродов друг от друга и от держателя 7 обеспечивается слюдяными или керамическими изоляторами 4, 5 и 8. Электрический вывод указанных электродов на ножку 6 механотрона осуществляется четырьмя контактными пружинками 10. Остальные элементы конструкции, изображенной на рис. 2.11, аналогичны описанны.м выше конструкциям диодных механотронов. Следует отметить, что механотронные преобразователи перемещений могут выполняться также в металлическом оформлении, т. е. с металлическим баллоном, изготовленным из тонкостенной трубки. При этом их -конструкция существенно не отличается от рассмотренных выше конструкций металлостеклянных механотронов. Рассмотренные выше (рис. 2.8-2.11) механотронные преобразователи перемещений и усилий предна- 3!1Ййены для измерения механических величин, действующих только в одном направлении, перпендикулярном- плоскости электродов механотронов. Такие преоб-Р-ЛОватели часто называют однокомпонентными или Оййокоординатными механотронами. На рис. 2.12,а представлена базовая конструкция Двухкомпонентного (двухкоординатного) механотрона, предложенная для измерения векторных механических величин [44]. Подвижный анод /, выполненный в виде стержня квадратного сечения, с помощью керамического изолятора 2 жестко укреплен на управляющем стержне 3, впаянном в эластичную мембрану 4, являющуюся частью вакуумной оболочки механотрона. Со стеклянным баллоном 5 мембрана соединена посредством металлического фланца 6. Четыре одинаковых подогревных катода 7 с подогревателями 8 жестко связаны с баллоном 5 с помощью двух слюдяных пластин 9, соединенных друг с другом никелевыми траверсами 10. Все электроды механотрона электрически соединены с выводами его ножки. При этом электрический вывод подвижного анода обеспечивается эластичной пружиной 12, не препятствующей свободному пе- 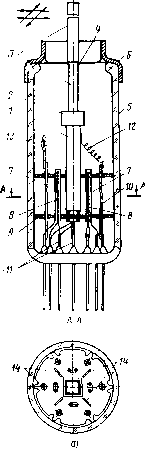 Рис. 2.12. Конструкция двухкомпонентного диодного механотрона (а) и измерительная схема на его основе (б) ремещению анода. Механотрон снабжен стандартными распыляемыми газопоглотителями 13. Кинематическая система механотрона, образованная управляющим стержнем, мембраной и анодом, подвергается механическому воздействию в направлении, перпендикулярном продольной оси стержня, и имеет, очевидно, две степени свободы. Конструкции механотронов могут выполняться в виде двух вариантов. В первом случае анод выполняется в виде сплошного стержня квадратного сечения, а во втором - в виде полого стержня. Выполнение анода в виде сплошного стержня целесообразно в том случае, когда механотрон используется не только для измерения перемещений и усилий, но и для измерения ускорений и углов наклона. При этом анод является инерционной массой. Благодаря выполнению анода в виде полого стержня, имеющего малую массу, удается уменьшить инерционность кинематической системы механотрона, т. е. повысить ее резонансную частоту, что весьма важно при регистрации механотроном быстроизменяющихся процессов, например пульсаций скорости жидкостных и воздушных потоков. Еще больше уменьшить инерционность кинематической системы механотрона удается при применении перфорированного, или сетчатого, анода [44]. Механотрон для двухкоординатных измерений представляет собой две двухкатодные механотронные системы продольного управления с общим анодом, причем плоскости электродов обеих механотронных систем ориентированы перпендикулярно друг другу. Каждая из двух механотронных систем преобразователя обладает наибольшей чувствительностью только в одном направлении: при перемещении анода перпендикулярно плоскости ее электродов. Применение двух катодов в каждой механотронной системе позволяет существенно повысить ее чувствительность по току к перемещению. Весьма важным для получения стабильных выходных сигналов, снимаемых с каждой пары катодов, является экранировка катодов от взаимного электрического влияния друг на друга, что достигается в описываемом механотроне применением экранирующих электродов, которые выполняются либо в виде прикатодных траверз, расположенных вдоль узких сторон катода, либо в виде пластин 14 (рис. 2.12,а), расположенных между соседними катодами. На рис. 2.12,6 приведена принципиальная электрическая схема включения дву.хкомпонентного механотрона, которая состоит из двух автономных измерительных мостов, в одну из диагоналей которых включены источники питания анодов Е и Е<, а в другую -выходные отсчетные приборы ИП и ЯЛг. Плечи мостов образованы сопротивлениями катодных нагрузок /?к1 -к4 и межэлектродных промежутков его механотронных систем. Механический сигнал (перемещение или сила) воздействует на внешний конец управляющего стержня перпендикулярно его продольной оси и вызывает перемещение анода механотрона относительно катодов прибора. Перемещение анода приводит к изменению токов в цепях катодов механотрона и в результате - к изменению выходных сигналов в цепях выходных отсчетных приборов схемы. При этом величины выходных сигналов пропорциональны двум взаимно перпендикулярным составляющим вектора перемещения, приложенного к концу штыря механотрона. Шкалы выходных приборов ИПх и ЯЯг предварительно тарируются в единицах измеряемого сигнала (перемещения, силы, скорости, ускорения). Произведя отсчет выходных сигналов механотрона (т. е. определив составляющие вектора перемещения, силы, скорости или ускорения) и зная расположение плоскостей электродов механотронных систем прибора, можно определить как величину, так и направление соответствующего вектора, воздействующего на внешний конец управляющего стержня механотрона. С целью обеспечения высокого внутреннего сопротивления и повышенной чувствительности не по току, а по напряжению описанный механотрон может быть выполнен в триодном варианте. В этом случае каждый катодный узел снабжается управляющей сеткой. Конструкция механотронных преобразователей давления. Манотроны относятся к датчикам давления деформационного типа, важным преимуществом которых является независимость их показаний от рода газа или пара, давление которого измеряется [1, 3, 27, 74]. Изменение тока подвижного анода Д/а.п в манотроне пропорционально разности давлений по обе стороны его упругого элемента: h.n - VlpiPn- Рв.б), (2.67) [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [ 15 ] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] 0.0088 |