
|
|
|
Главная страница Механотроны [0] [ 1 ] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] в вакуумных механотронах продольного управления используется зависимость анодного тока прибора от расстояния между анодом и катодом или сеткой и катодом, в газоразрядных - зависимость напряжения на разрядном промежутке от расстояния между электродами. Продольный способ управления используется в большинстве практически осуш,ествленных конструкций механотронов [4-6]. Общее число электродов в вакуумных механотронах продольного управления может составлять два (диод), три (триод) или четыре (тетрод). Наибольшее распространение получили диодные и триодные вакуумные механотроны продольного управления. «л к»  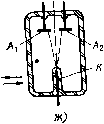 Р>ис. 1.1. Принципы действия и конструкции механотронов, инпладов н преобразователей с управлением внешним электрическим полем; Л - анод, К -катод (прямонакальный и подогревный X - холодный катод (антианод), Я - электронно-механический разделитель. Я -электрои-но-лучевая пушка, О - отклоняющие пластины, Кол - система коллекторов При поперечном управлении электронным током направление перемещения подвижного электрода перпендикулярно линиям электрического поля [6, 7]. На рис. 1.1,6 приведена схема вакуумного диодного механотрона поперечного управления с подвижным анодом, управление анодным током которого осуществляется путем изменения части площади катода, перекрываемой анодом, а на рис. 1.1,0 - схема двуханодно-го механотрона поперечного управления с прямонакальный катодом. Поперечное управление электронным током применимо также и в газоразрядных механотронах тлеющего разряда. В механотронах зондового управления кроме анода и катода имеется дополнительный электрод - зонд, выполненный обычно в виде тонкого стержня и расположенный либо непосредственно в межэлектродном промежутке анод - катод, либо вблизи от указанного промежутка. Перемещение зонда относительно неподвижных электродов сопровождается изменением тока в цепи зонда, причем это изменение тока пропорционально смещению зонда. Наиболее известны газоразрядные механотроны зондового управления. На рис. 1.1,г изображена конструкция механотрона тлеющего разряда с плазменным катодом и «заанодны-ми» зондами [8]. При возбуждении между пластиной 1 и анодом 2, выполненным в виде пластины с отверстием, тлеющего разряда формируется плазменный катод. Два стержневых зонда 3 и 4 расположены вблизи от отверстия анода, причем их оси параллельны плоскости анода. Часть заряженных частиц плазменного катода проникает через отверстие в аноде из основного разряда в заанодное пространство и, попадая в область действия электрического поля зондов, достигает их поверхности, образуя зондовые токи. Потенциалы зондов относительно анода могут быть положительными - и тогда зондовые токи содержат в основном электронную составляющую или отрицательными - и тогда зондовые токи образуются ионами. При перемещении одного из зондов параллельно анодной плоскости его ток меняется пропорционально величине смещения. Механотроны зондового управления, как правило, обладают малой потребляемой мощностью. Дифференциальный способ управления электронным током [6] осуществляется путем перемещения положительного электрода (анода) внутри неподвижного отрицательного электрода (антианода), что сопровождается изменением степени экранирования термокатода от воздействия анода (рис. !,<?). Этот способ управления принципиально применим как в вакуумны.х, так и в газоразрядных механотронах, но в настоящее время практически опробован мало. В качестве примера механотрона с дифференциальным управлением можно привести конструкцию механотрона с автоэмиссионным катодом, выполненным в виде острия, расположенного внутри подвижного экранирующего кольца [9J. Механотроны с механическим управлением электронным лучом представляют собой электронно-лучевую трубку с коллекторами электронов (рис. 1.1,е), в которой при перемещении одной из отклоняющих пластин (или другого электрода) происходит отклонение электронного луча, что приводит к изменению токов коллекторов [6, 10J. Подобные электронно-лучевые механотроны из-за сложности конструкции и схем включения, а также из-за трудностей практического исполнения и неудобств при эксплуатации вряд ли найдут широкое применение. Отличительной особенностью всех механотронных преобразователей является наличие одного или нескольких подвижных электродов, соединенных с оболочкой (баллоном) прибора посредством упругого элемента (мембраны, сильфона, пружины и т. п.). Электронные преобразователи на основе инерционно-плазменного эффекта (инплады или инплатроны) не имеют упругих элементов и подвижных деталей [11]. На рис. \.\,ж показана типичная конструкция инпла-да, представляющая собой прибор тлеющего разряда с холодным катодом К и двумя анодами Л, и Лг, жестко соединенными между собой оболочкой прибора. При приложении к инпладу соответствующего напряжения между катодом и анодами удается получить газоразрядный контрагированный шнур, выполняющий в приборе роль инерционного элемента. Как было установлено, контрагированный шнур может смещаться под действием силы тяжести и при неравномерном движении газоразрядной трубки в направлении, перпендикулярном ее продольной оси. Было установлено также, что контрагированный шнур может совершать низкочастотные автоколебания, а также вынужденные колебания при неравномерном перемещении инплада. Смещение шнура относительно анодов вызывает соответствующие изменения анодных токов во внешней цепи прибора. Получены действующие образцы инпладов, предназначенных для измерения линейных ускорений и углов поворота. Эти приборы отличаются простотой конструкции, малыми габаритными размерами и массой, малым потреблением энергии. К недостаткам известных конструкций инпладов следует отнести невысокую стабильность и воспроизводимость показаний, а также повышенную чувствительность к изменению температуры окружающей среды. Преобразователи с управлением электронным током путем изменения ориентации внешнего электрического поля представляют собой газоразрядные датчики, работающие в высокочастотном электрическом поле 112-14]. На рис. 1.1,3 показана схема такого преобразователя. Сам датчик представляет собой миниатюрный стеклянный баллон /, наполненный инертным газом при давлении 1,33-10 Па, в который вварены два проволочных электрода 2. Датчик помещается между пластинами конденсатора <?, который питается от генератора 4 с частотой, выбираемой в диапазоне 0,1- 10 МГц. При этом в баллоне возникает тлеющий высокочастотный разряд. Выходной отсчетный прибор - высокоомный гальванометр 5 подключается непосредственно к электродам 2. Датчик может перемещаться в направлении, показанном стрелками. Когда баллон датчика находится в среднем положении, напряжение на его электродах равно нулю. При перемещении датчика в направлении, указанном стрелкой, на его электродах появляется постоянное напряжение, пропорциональное смещению датчика от среднего положения. По литературным данным подобные газоразрядные датчики (например, датчик типа Т-42 [12]) обладают высокой чувствительностью и большим сроком службы. Преобразователи с магнитным управлением электронным током [15]. Их принцип действия основан на изменении траектории электронов в электровакуумном приборе (лампе) под действием магнитного поля. Анодный ток лампы 2 такого преобразователя (рис. 1.2,а) обычно управляется изменением ориентации внешнего магнитного поля, создаваемого постоянным магнитом / или электромагнитом. При этом лампа (или магнит) связаны с кинематической системой <3. В случае параллельности векторов напряженности электрического Е и магнитного Н полей поток электронов, эмиттируемый катодом К (рис. 1.2,6) и проходя- 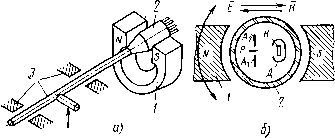 Рис. 1.2. Принцип действия и конструкция преобразователя с управлением внешним магнитным полем щий через щель в диафрагме Д, поровну распределяется между анодами Л, и Лг. Поворот лампы относительно магнита вызывает смещение потока электронов под действием магнитного поля в сторону одного из анодов. Ток первого анода увеличивается, а второго - уменьшается, что приводит к изменению выходного напряжения между анодами лампы. При этом выходной сигнал преобразователя оказывается пропорциональным углу поворота магнита. Достоинством магнитоуправляемых электронно-механических преобразователей является возможность получения на их основе бесконтактных измерительных устройств. Разновидностью магнитоуправляемых электронно-механических преобразователей являются приборы, основанные на использовании магнетронного эффекта в электровакуумных приборах [3, 16]. В этих приборах электроны, эмиттируемые катодом, движутся по спирали и при определенной величине напряженности магнитного поля совсем не попадают на анод. Эти приборы сравнительно просты по конструкции и дешевы. Однако по метрологическим параметрам магнетронные преобразователи значительно уступают механотронам и рас- смотренным выше магнитоуправляемым электронно-лучевым преобразователям. Из рассмотренных выше электровакуумных электронно-механических преобразователей наиболее перспективными являются вакуумные механотроны продольного и поперечного управления. Возможность получения высокой чувствительности сочетается в этих механотронах с простотой конструкций. Они требуют простых электрических схем и сравнительно низких питающих напряжений. Указанные механотроны могут применяться в высокоточных измерительных устройствах. В связи с вышесказанным именно эти механотроны были положены в основу создания высокочувствительных прецизионных электромеханических преобразователей различного назначения. 1.2. ПРИНЦИП ДЕЙСТВИЯ МЕХАНОТРОННЫХ ПРЕОБРАЗОВАТЕЛЕЙ РАЗЛИЧНОГО НАЗНАЧЕНИЯ В зависимости от вида измеряемой механической величины механотроны подразделяются на преобразователи перемещений, усилий, давлений, ускорений, углов поворота и параметров вибраций. Особую группу среди механотронов составляют механотронные преобразователи (датчики) частоты. Подвижные электроды механотрона соединяются с его оболочкой (баллоном) посредством упругого элемента (мембраны, консольной пружины, торсионного подвеса и т. п.). Совокупность электродов механотрона называется его электродной (или механотронной) системой, а упругий элемент вместе с подвижными электродами и другими подвижными деталями - его кинематической системой. Кинематическая система механотронных преобразователей линейных перемещений, усилий и давлений, как правило, имеет внешний восприниматель механического сигнала, и эти преобразователи обычно называются механотронами с внешним механическим управлением. Механотронные преобразователи ускорений, вибраций, а также некоторые виды преобразователей угловых перемещений и углов поворота могут быть выполнены как с внешним, так и с внутренним механическим управлением. [0] [ 1 ] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] 0.0195 |