
|
|
|
Главная страница Механотроны [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [ 20 ] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] Наименьшая величина степени нелинейности достигается при использовании третьего способа линеаризации. С практической точки зрения более удобен второй способ - способ хорды. Ниже рассматривается наименее благоприятный случай линеаризации выходной характеристики с помощью касательной /. Для определения степени нелинейности выходной характеристики механотронного моста в случае симметрии его параметров представим систему уравнений (3.8)-(3.12) в виде (1+г)2 (1-82)3/2 (1-2)2 == 1; (3.22) (3.23) (3.24) где введены следующие обозначения для относительного приращения напряжения на анодах б, g. относительного перемещения z и внутреннего сопротивления /?о : о, = (Uai - f/ao),t/ao; Ъ = (fa2 - - Uio)/Uno; г = Adjdd; Ro = t/ao/ao = 3/2/?;o, a также использовано соотношение, очевидное для момента баланса моста: 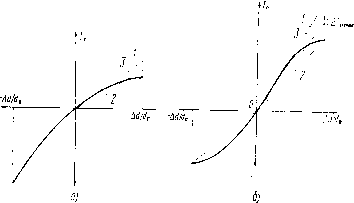 Рис. оА. Типичные способы линеаризации выходных характеристик механотронного моста на основе сдвоенного диодного механотрона с одним (а) и двумя (б) подвижными анодами: / - касательная к реальной характеристике; 2 - хопда, соединяющая точки ои™ 1 ТяяГ""" диапазона измТений°рТль„ой хара°кте Сеанпй х7пяк?рп„; "РООДЯЩЗЯ через точки нулевую и расположенную на реальной характеристике так, что максимальные отклонения прямой от характеристики вверх и вниз одинаковы где t/ao и /ао - соответственно анодные напряжение и ток в момент баланса моста. Разлагая выражения (1 ± 6,5) 2 в ряд по степеням б, 2И ограничиваясь членом второго порядка, получаем для первых двух уравнений системы (3.22) -(3.24): -82+8. = 0; 4-82-8, (1-г)2 "а + 1-(1-2)2(1-f-]=0. \ ho I (3.25> (3.26> Выражения (3.25) и (3.26) представляют собой квадратные уравнения относительно б, и 62. Решая их, используя уравнение (3.24), получаем выражение для тока в измерительной диагонали моста [51]:
(3.27> является равенство нулю выражения при в знаменателе (3.27). Решая уравнение R± 2 I - о 2 ;?о " /?а 2 /?о относительно Ra/o, находим его корни в виде /?о 3 2Rq - V 9 \2rJ -Учитывая, что физический смысл имеет лишь первый из этих корней, и введя в его выражение дифференциальное внутреннее сопротивление 7?,-о=2/3/?о, получаем а=.1 + ./ 1 -f (-А <0 2/?,с (3.28). 125 Из выражения (3.28) следует, что если /?„ < Rio. то линейность выходной характеристики достигается прн /?а = 2/?. а в случае -п > Rio условием линейности является R = Riq для любого промежуточного случая R = (1-2) Riq. Из выражения (3.27), используя (3.21), можно определить нелинейность 8 мост выходной характеристики при произвольном значении анодных нагрузок. Для Емост имеем следующее выражение: *мост 1 j /?о4" RiO + 1- 3/?, R.-\-R l+/?„/2/?3 + /?„/2/?,o Wo У J 2 •100%. (3.29) Результаты вычислений для. Ad/do=0,5 и при /?п ?го = const зпредставлены на рис. 3.5. При /?а = Rio выражение (3.29) переходит в более простое: 1- 1 l+i-(Arf/rfo)= 4 100%, (3.30) ;которое показывает, что для случая R = 3Rio значение е„ост не зависит от /?п. а определяется только отношением Ad/do- Поэтому жрнвые 1-5, изображенные на рис. 3.5, пересекаются при Ra=3Rio. На ряс. 3.6 приведены графические зависимости е„ост =/(Ad/do) .для двух значений R .
Рнс. 3.5. Зависимости Емост = =fiR&/Rio) для механотронно-«о моста на сдвоенном диодном механотроне с двумя подвижными анодами (кривые 1-5) и с одним подвижным анодом (кривые 6-8) для Ad/da.„o= =0,5 и различных Rn/Rw J, 6 - 0,01; 2-0,1; 3. 7-1- 4 8 - 10 И 5 - 100 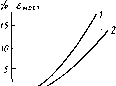 1 \f I-1-1-1-ud 0 0,1 at 0,6 0,8 1 Рис. 3.6. Зависимости емост = =f(Ad/da.Ko) для механотронного моста на сдвоенном диодном механотроне с двумя подвижными анодами при /?п> Аналогичным образом может быть получено выражение для определения нелинейности выходных характеристик симметричного механотрона с одним подвижным анодом: 2RaRi,Ro + RuRs . / 2Д\ RnR.+RioRn(i + -ji 2RlR,o2RJtl[\-HAdldof Ra + Rto{\-~2Adjdo) • 100% (3.31 > Анализ полученного выражения показывает, что для случая сдвоенного механотрона с одним подвижным анодом оптимальный режим, прн котором е„о(.т отсутствует. На рнс. 3.5 изображены типичные зависимости (кривые 6-8) степени нелинейности выходных характеристик этих механотронов от параметров мостовой схемы /?а и R„, полученные для Ad/do= =0,125. Приведенный выше анализ характеристик н параметров механотронных мостов является приближенным, так как основывается на упрощенном уравнении закона степени 3/2. Однако формулы (3.28)-(3.31), полученные в результате исследования степени нелинейности рабочих характеристик механотронных мостов, а также формулы (3.19) и (3.20) для рабочей чувствительности по току этих мостов дают неплохое совпадение с эксперяментальнымн данными. Типичные рабочие характеристики сдвоенного диодного механотрона с двумя подвяжнымн анодами, снятые при различных Ra даны на рис. 3.7, а на рнс. 3.8 приведены экспериментальные зависимости емост =/(/?a ?w). полученные для серийного сдвоенного-диодного механотрона с двумя подвижными анодами типа бМХЮ. 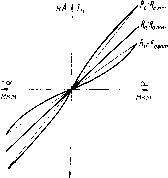
Рнс. 3.7. Рабочие характеристики диодных механотронов с двумя подвижными анодами, полученные для различных значений Ra Рис. 3.8. Зависимости 8мост(1) = = f(R&IRio) для механотрона-6МХ1С, рассчитанные по формуле (3.29) и полученные экспериментально для Ad/do=0,33- Выше был рассмотрен наиболее неблагоприятный случай линеаризации выходной характеристики механотронного моста с помощью касательной 1 (рис. 3.4). При этом величина 8moct(i) имеет наибольшее значение по сравнению с другими способами линеаризации выходной характеристики моста. Нами были определены следующие соотношения между е„ост(1) (линеаризация касательной /), б„ост(2) (линеаризация хордой 2) и 2мост(з) (линеаризация прямой 3 на рис. 3.4): мост (1) мост (2): биост (3) = 4:1 :0,68 (3.32) - для диодного механотрона с одним подвижным ано-.дом; мостО) мост (2) е„ост (3) = 2,6 : 1:0,65 (3.33) - для сдвоенного диодного механотрона с двумя подвижными анодами. Из (3.32) и (3.33) следует, что при аппроксимации выходной характеристики механотронного моста с помощью хорды (наиболее распространенный способ линеаризации) значение нелинейности е„ост(2) будет в 4 раза меньше для механотрона с одним подвижным анодом и в 2,6 раза меньше для механотрона с двумя подвижными анодами. Как следует из формул (3.29) и (3.31), в первом приближении нелинейность выходных характеристик рассмотренных механотронных мостов не зависит от анодного напряжения механотрона. Более тщательный анализ этого параметра, проведенный с помощью электронно-вычислительной машины, показал, что в действительности Бмост зависит от напряжений на электродах механотрона (в частности, от U). В особенности эта зависимость становится заметной при значениях Бмост < Рис. 3.9. Типичные рабочие характеристики перемещения диодного механотрона продольного управления с двумя прямонакальными нитевидными катодами и общим подвижным анодом при Ua=12 В, полученные прн различных сопротивлениях Rk в цепях катодов: 5 кОм (/); 2,5 кОм (2); i кОм (3); значение чувствительности по току к перемещениям: 12,2 мкА/мкм (/); 7.2 мкА/мкм (2); 5,1 мкА/мкм [3)  И%. При этом для обеспечения вмост <0,2%, как пра-ало, необходима индивидуальная подгонка режима ме-анотронов [52]. р Рабочие (выходные) характеристики сдвоенных ди-гЬдных механотронов с прямонакальными катодами и триодных механотронов продольного управления. Типичные рабочие характеристики указанных механотронов, включенных по мостовой схеме, приведены на рис. 3.9, 3.10. Эти характеристики получены экспериментально. Как видно из рис. 3.9 и 3.10,а рабочие характеристики сдвоенного диодного механотрона с двумя прямонакальными катодами и с одним подвижным анодом, а также сдвоенного триодного механотрона с двумя подвижными анодами и общими катодом и сеткой отличаются высокой линейностью (б„ост <0.5%). Следует отметить, что в отношении линейности рабочих характеристик указанные типы механотронов, как показали проведенные исследования, превосходят диодные механотроны продольного управления с плоскопараллельнымн электродами, что объясняется повышенной линейностью статических характеристик перемещения первых двух типов механотронов (см. рис. 1.15). При этом для этих механотронов необходимость в по- тн SO is W ,
 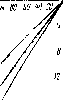 юга w so so мкм Рис. 3.10. Типичные рабочие характеристики перемещения сдвоенного триодного механотрона продольного управления с двумя подвижными анодами при 1/а=80 В (а) и с одним подвижным анодом при t/a =100 в (б) 9-1003 129 [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [ 20 ] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] 0.0147 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||