
|
|
|
Главная страница Механотроны [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [ 17 ] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] Следует отметить, что в описанных выше базовых конструкциях манотронов могут быть использованы не только диодные механотронные системы продольного управления, но и другие типы этих систем (например, диодные системы поперечного управления или триодные системы продольного управления). Конструкции механотронных акселерометров и вибропреобразователей. Базовые конструкции механотронных акселерометров и вибропреобразователей с внутренним механическим управлением приведены на рис. 2.15-2.17. Конструкции, изображенные на рис. 2.15 и 2.16, сравнительно просты. 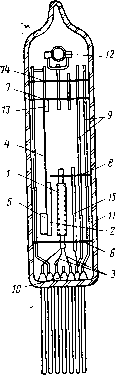 Рис. 2.15. Конструкция сдвоенного диодного механотронного акселерометра с внутренним управлением и с одним подвижным анодом 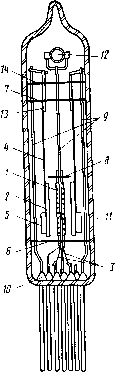 Рис. 2.16. Конструкция сдвоенного диодного механотронного акселерометра с внутренним управлением и с двумя подвижными анодами Электродная система этих механотронов выполнена в виде сдвоенного диода с неподвижным общим катодом и с одним (рис. 2.15) или двумя (рис. 2.16) подвижными анодами. Подогревный оксидный катод / (подогреватель 3} и неподвижный анод 15 установлены в слюдяных пластинах 6 я 8, которые жестко соединены между собой при помощи траверз 9 и укреплены в баллоне 11. Кинематическая система механотрона состоит из пружины 4, подвижного анода 2 и инерционной массы 5. Свободный конец пружины 4- приварен точечной электросваркой к скобе 13, укрепленной на пластине 7. Нижние концы траверз 9 привариваются к выводам плоской ножки 10. В верхней части арматуры механотрона приварена полочка 12 со стандартным распыляемым газопоглотителем и слюдяной экран 14, предохраняюВД1ЕЙ арматуру от напыления газопоглотителя. Перемещение подвижного анода в направлении к катоду ограничивается пластиной - ограничителем 8, а в противоположном направлении-траверзами 9. В качестве материала упругих элементов описанных механотронных акселерометров и вибропреобразователен могут быть использованы нержавеющая сталь 36НХТЮ, сплав Н41ХТ, обладающий повышенной температурной стабильностью упругих свойств, а также тугоплавкие металлы (тантал, молибден и др.), сохраняющие высокую упругость после значительного нагревания упругого элемента, возможного в процессе изготовления механотрона. На рис. 2.17 изображен еще один вариант конструкции механотронного преобразователя с внутренним управлением, который был использован в качестве сей-смодатчика [47J. Кинематическая система этого механотрона представляет собой двухплечий рычаг, укрепленный на торсионном подвесе 9. Воспринимающий элемент системы состоит из двух слюдяных пластин 1, на концах которых укреплены инерционные массы 2 к 3 я пластины двух анодов 4 я 5. Слюдяные пластины 1, соединенные между собой пистонами 6, образуют короМысло, в центре которого с помощью пистонов 7 и специальных хомутиков 8 укреплен торсион 9. Концы торсиона посредством стержней 10 приварены к траверзам 16 арматуры механотрона. Катод 11 косвенного накала (подогревают По А-А тель 12) установлен в слюдяных дисках и расположен вдоль оси механотрона. При сборке арматуры между анодами и катодом устанавливается заданное межэлектродное расстояние rfa.K- Для обеспечения плотной посадки арматуры в баллоне механотрона 14 применяются два опорных слюдяных диска 15, которые жестко связаны между собой и с катодными дисками 13, траверзами 16 и пистонами 17. Все электроды механотрона электрически соединены с выводами 18 ножки прибора. При этом электрический вывод анодов обеспечивается специальными эластичными контактными пружинками 19, которые не препятствуют перемещению коромысла при работе прибора. Механотрон снабжен полочкой 20 с газопоглотителем. Недостатками описанных выше конструкций механотронных акселерометров являются низкая частота собственных колебаний кинематических систем и большое время их затухания из-за отсутствия демпфирования. Указанные недостатки ограничивают применение этих механотронов. Следует отметить, что в механотронах с внутренним управлением применение эффективного демпфирования для уменьшения времени затуха-ния собственных колебаний очень сложно. Использование для этой цели воздушных или жидкостных успокоителей в данном случае невозможно, так как кинематические системы механотронов находятся в вакууме. Конструкция же до- Рис 2.17 Конструкция механотронного акселерометра с кинетической системой в виде коромысла на торсионном подвесе 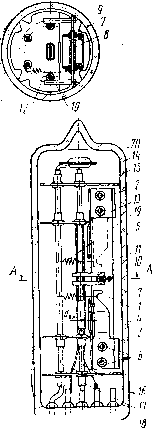 статочно эффективных электромагнитных демпферов сложна и приводит к значительному повышению стоимости приборов. Задача демпфирования кинематической системы решается проще в механотронных акселерометрах с внешним механическим управлением. Эти акселерометры представляют собой обычные механотронные преобразователи перемещений, на штыре которых укреплена инерционная масса (см. рис. 2.2,в). Погружая в штырь механотрона и инерционную массу в жидкость с определенной плотностью, удается осуществить простой способ демпфирования кинематической системы механотронного акселерометра с внешним управлением. При этом время затухания свободных колебаний системы такого акселерометра в несколько раз меньше времени затухания кинематических систем акселерометров с внутренним управлением. В конструкциях механотронных акселерометров, изображенных на рис. 2.16 и 2.17, частоту собственных колебаний (резонансную частоту) кинематической системы обычно не удается сделать выше 150 Гц. Поэтому рассмотренные конструкции преобразователей могут использоваться только для контроля медленно изменяющихся ускорений, а также низкочастотной вибрации. Повышение резонансной частоты fo кинематических систем механотронов может быть осуществлено за счет уменьшения колеблющейся массы этих систем. На рис. 2.9 была приведена конструкция механотронного преобразователя перемещений, у которого подвижный электрод (анод) и штырь выполнены в виде полых легких трубочек. Этот механотрон, имеющий повышенную резонансную частоту fo (до 4 кГц), может быть использован в качестве амплитудомера при измерении вибраций. Как было показано выше (§ 1.5), выполнение внутренней части стержня, играющей роль подвижного анода в механотроне, изображенном на рис. 2.9, в виде цилиндрической трубочки позволяет в 2-3 раза повысить fo по сравнению со сплошным цилиндрическим стержнем. Еще большее увеличение резонансной частоты механотрона может быть достигнуто при выполнении внутренней части стержня и подвижного анода в виде полого тела вращения (см. рис. 1.19,г), внешняя поверхность которого образована поверхностью усеченно- го конуса, а внутренняя - поверхностью цилиндра. Повысить резонансную частоту механотрона удается также путем выполнения внутренней части стержня в виде? полого конуса (см. рис. \Л9,ж). Резонансная частота подобных полых стержней может быть повышена до 8-12 кГц. В рассмотренных выше типовых конструкциях акселерометров и вибропреобразователей кроме диодных механотронных систем продольного управления могут использоваться и другие типы этих систем (например, триодные системы продольного управления). Конструкции механотронных преобразователей углов поворота. Механотронный угломер, изображенный на рис. 2.18, представляет собой сдвоенный диод, аноды которого укреплены на упругом подвесе-торсионе 2 и могут перемещаться по отношению к катоду 3 поперек линий электрического поля межэлектродного промежутка (поперечное управление). Катод механотрона жестко соединен с баллоном 4. При отклонении баллона механотрона на заданный угол от вертикального положения его катод 3 также отклоняется, а аноды 1 остаются в начальном положении благодаря действию силы тяжести, создаваемой специальными грузиками 5, укрепленными на анодах, и закручиванию торсиона. В результате этого происходит смещение катода относительно анодов и изменение токов анодов, пропорциональных углу отклонения баллона механотрона. Описанная конструкция механотронного угломера рассчитана на измерение углов поворота в диапазонах ±Г - ±20°. Дальнейшее расширение диапазона измерений у подобных механотронных угломеров (до ±90°) может быть осуществлено при использовании электронной системы поперечного управления с экранирующим электродом [4, 7]. Следует отметить, что в качестве механотронных угломеров могут ис- Рис. 2.18. Конструкция механотроиного преобразователя углов поворота 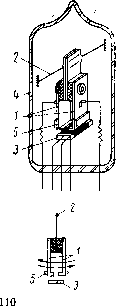 пользоваться также конструкции акселерометров с внутренним и внешним механическим управлением (рис. 2.15-2.17). 2.4. ЗОНА НЕЧУВСТВИТЕЛЬНОСТИ МЕХАНОТРОННЫХ ПРЕОБРАЗОВАТЕЛЕЙ Механотронные преобразователи находят применение для регистрации мгновенных значений переменных во времени механических сигналов в достаточно широком диапазоне частот: от частоты ниже 0,1 Гц до частот порядка 1 кГц. Например, при работе механотронного профилометра [60J, служащего для контроля степени шероховатости поверхностей деталей, на вход механотрона поступает переменный механический сигнал в виде очень малых перемещений с частотой до 200 Гц и амплитудой от сотых долей до единиц микрометра. Минимальная цена деления серийного профиломет- ра модели 253 составляет 0,002 мкм (20 А). Для оценки эксплуатационных возможностей механотронных преобразователей в подобных приборах большое значение имеет определение величины зоны нечувствительности преобразователя. Под зоной нечувствительности бз.н следует понимать область перемещений подвижного электрода (электродов) механотрона, которые нельзя зафиксировать в виде изменения анодного тока на фоне помех, создаваемых собственными шумами механотрона. От зоны нечувствительности следует отличать порог чувствительности преобразователя [3, 48J, под которым принято понимать то минимальное перемещение подвижных электродов 6п. которое еще может быть зафиксировано в виде изменения анодного тока механотрона. Очевидно, указанное изменение анодного тока должно быть больше беспорядочных самопроизвольных изменений анодного тока, обусловленных шумами механотрона, а величина 6,, должна быть хотя бы немного больше бз.н. т. е. 8п!>8з.н- Механотронный преобразователь, как известно, состоит из кинематической и электродной систем. При этом зона нечувствительности и порог чувствительности преобразователя в целом, как правило, определяются аналогичными параметрами его механотронной (электродной) системы. Принято считать, что для надежного измерения входного сигнала механотрона сигнал на выходе должен [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [ 17 ] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] 0.0108 |