
|
|
|
Главная страница Механотроны [0] [1] [2] [3] [4] [5] [6] [ 7 ] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] Диодные системы Сдвоенный диодный механотрон продольного управления с двумя подвижными анода-Ми  Сдвоенный диодный механотрон поперечного управления с двумя подвижными анодами 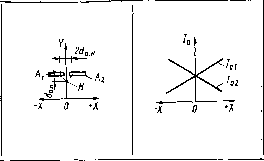 зующей эффективность использования анодного тока, при одинаковых электрических и конструктивных параметрах легко получить ?продЫ 2 (1,36) попереч(л) где / - ширина катода; d - межэлектродное расстояние анод-! катод диода. ; Поскольку для плоскопараллельных электродов, как правило, i>dg к преимущество по чувствительности и по эффективности ис пользования анодного тока механотронных систем продольного управления по сравнению с системами поперечного управления очевидно. Однако По возможностям расширения диапазона измерений, з также по линейности характеристик перемещения механотроны поперечного управления превосходят механотроны продольного управления. Как видно из табл. 1.2, статические характеристики перемещения механотронов поперечного управления практически линейны во всем рабочем диапазоне. Диодные механотроны, как правило, обладают высокой чувствительностью по току к перемещению-и малым внутренним сопро- с прямоугольным катодом где Ik - длина катода; al,2 . A (rfa.K ± X) lUf rdx rf2 тивлением, в то время как триодные механотроны обладают высокой чувствительностью по напряжению к перемещению подвижного электрода и высоким внутренним сопротивлением. При исследовании триодных механотронов продольного управления с подвижной сеткой установлено, что их характеристика перемещения имеет минимум (табл. 1.2, пп. 7 и 8), который ограничивает рабочий диапазон этой системы. Расстояние катод - сетка (с.ко) "Р" котором характеристика перемещения этой механотронной системы имеет минимум, в первом приближении можно рассчитать по формуле [4] с.х (0) = Cfa.K -f- pTUa 8 U,+ U, к.р.п / (7 рти. 8 t/c + iK.p. 4 lU + U, , (1.37) к.р.п где р - шаг навивки сетки; Т-функция коэффициента заполнения сетки; f/a. Uc, С/ р д-соответственно анодное напряжение, напряжение сетки и контактная разность потенциалов. Допустимые значения межэлектродного расстояния сетка - катод в трнодных механотронах с подвижной сеткой, как правило, должны лежать в пределах р < d < d причем нижний предел обусловлен островковым эффектом [23-25]. Трнодная система продольного управления с подвижными анодом и сеткой (табл. 1.2, пп. 9 н 10) в широком диапазоне перемещений подвижных электродов обладает высокой чувствительностью, превышающей чувствительность других трнодных механотронных систем продольного управления. Минимальные расстояния сетка - катод, допустимые в этих механотронах, должны удовлетворять условию <с.к ш/я Большие возможности в отношении расширения диапазона измерений (по перемещению) н простотой конструкции отличаются триодные механотроны с подвижным анодом (анодами) (табл. 1.2, пп. 4-6). При правильном выборе режима триодного механотрона с подвижным анодом должны выполняться условия Аа.с>йа.сшМ И UU,, (1.38) причем действующий потенциал сетки, соответствующий насыщению (Vns), может быть определен (при d = d нз зависимостей is f»Mmin) (Р" Ь которые рассчитаны для диодного механотрона, а расстояние d соответствующее Ug, может быть найдено нз формулы для действующего потенциала сеткн, например нз выражения с/=и,+ 0к.р.„ + и„ (1.39) которое справедливо для случая сравнительно редких сеток (с коэффициентом заполнения, меньшим 0,3 [4, 25]) н расстояний d 30,2 мм, что, как правило, выполняется в реальных конструкциях трнодных механотронов. Механотроны с прямонакальными нитевидными катодами (табл. 1.2, пп. 15 и 16) отличаются высокой экономичностью, т. е. малой потребляемой мощностью. Рис. 1Л4. Зависимости степени нелинейности (Вэ) статических характеристик перемещения от относительного смещения (г) подвижного электрода механотронов продольного управления: / - диодного механотрона с плоскопараллельнымн электродами; 2 - триодного механотрона с плоскопараллельными электродами при f „=0; 3 - диодного механотрона с прямонакальным нитевидным катодом и плоским анодом О 0,2 0,4 0,6 0,в г Анализ различных вариантов механотронных систем продольного и поперечного управления в отношении степени нелинейности их статических характеристик перемещения, определяемой по формуле (1.19), показывает, что этн характеристики у механотронов поперечного управления в бо.аьшннстве случаев принципиально линейны. В порядке возрастания степени нелинейности характеристик перемещения механотроны продольного управления располагаются следующим образом (рис. 1.14): диодные механотроны с прямонакальными (нитевидными) катодами н плоским анодом (табл. 1.2, п. 15); Триодные механотроны с плоскопараллельнымн электродами при потенциале сеткн, равном нулю (Uc =0) (табл. 1.2, пп. 4-6); диодные механотроны с плоскопараллельнымн электродами (табл. 1.2, пп. 1-3). Различные варианты диодных и триодных механотронных систем продольного и поперечного управления с плоскопараллельными электродами используются в выпускаемых серийно отечественной промышленностью механотронах (например, типов 6МХ1С, 6МХ2Б, 6МН1Б, 6МУХ6П и др.) [27, 28]. Высокоэкономичрые механотроны с прямоканальными нитевидными катодами разработаны и применяются в отечественном приборостроении [29]. В виде триодов продольного управления выполнены механотроны RCA-5734 (США) и Met-ran-5734A (Япония) [1, 4]. 1.4. ГАЗОРАЗРЯДНЫЕ ЭЛЕКТРОННО-МЕХАНИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ И МЕХАНОТРОНЫ Целесообразность разработки газоразрядных механотронов обусловлена необходимостью снижения потребляемой механотроном мош,ности. При этом в газоразрядных механотронах, как правило, отсутствует цепь накала катода, на питание которой в вакуумных механотронах приходится основная часть мощности, потребляемой прибором. Рнс. 1.15. Принципиальная конструкция двуханодного механотрона тлеющего разряда с полым катодом (а) и его электродная система (б) 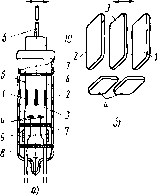 Следует отметить, что попытки создания высокоэкономичных газоразрядных механотронов на основе тлеющего разряда предпринимались неоднократно [6]. Однако предложенные ранее конструкции газоразрядных механотронов обладали весьма низкими метрологическими параметрами, что позволяло использовать их в лучшем случае в качестве индикаторов. На рис. 1.15,а схематично изображена конструкция механотрона тлеющего разряда с полым катодом [30], обладающая достаточно высоким уровнем чувствительности и точностных параметров [8, 31]. Электродная система этого механотрона (рис. 1.15,6) состоит из трех параллельных друг другу катодных пластин 1, 2 и 3 и двух пластинчатых анодов 4, плоскости которых перпендикулярны плоскостям катодных пластин. Три катодных пластины служат для формирования двух полых катодов; пластины J я 3 образуют одну полость катода, а пластины 2 и 5 -другую. Пластины катода 1 и 2, так же как и пластины анодов 4, являются неподвижными электродами механотрона, а пластина <? -его подвижным электродом. Последняя соединена с управляющим стержнем 5, на внешний конец которого воздействует контролируемый механический сигнал. В конструкции, изображенной на рис. 1.15, используется обычная для механотронных преобразователей перемещений и усилий кинематическая система мембрана-стержень. Эта конструкция содержит также обычные для механотронов крепежные траверсы 6, слюдяные диски 7, баллон 8, фланец 10, газопоглотитель 9. Принцип действия механотрона состоит в том, что при перемещении пластины 3 полость одного из катодов увеличивается, а второго уменьшается, в результате 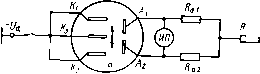 Рнс. 1.16. Электрическая схема включения механотрона тлеющего разряда; К,, К. /Сз-катодные пластины; Л,, аноды; й,,, - сопротивления анодных нагрузок; fj, - напряжение анодного питания; «„.р - ограничительный резистор чего токоотбор из первой полости уменьшается, а второй увеличивается. Это в конечном счете приводит к возникновению напряжения разбаланса мостовой схемы, изображенной на рис. 1.16. Напряжение разбаланса моста, измеряемое выходным прибором ИП, пропорционально входному механическому сигналу. Потребляемая мощность описанной конструкции механотрона тлеющего разряда менее 25 мВт при чувствительности 10-20 мВ/мкм, а нелинейность выходной характеристики перемещения порядка 1% в диапазоне ±200 мкм [31]. Описанная конструкция электродной системы механотрона тлеющего разряда может быть положена в основу создания безнакальных высокоэкономичных механотронных преобразователей давлений, ускорений, углов поворота и т. п. На рис. 1.17,а представлена схема одного из типов газоразрядных преобразователей перемещений, механи- 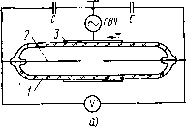 Рис. (1.17. Электронно-механический преобразователь на основе высокочастотного тлеющего разряда (а) и его рабочая характеристика перемещения (б) ческое управление в котором осуществляется за счет изменения ориентации внешнего электрического поля высокой частоты относительно разрядной трубки [13, 14]. Преобразователь содержит газоразрядную трубку 1 с двумя электродами 2 и наружный подвижный электрод 3, воспринимающий контролируемое перемещение а. Один из зажимов высокочастотного источника напряжения-генератора {ГВЧ) через конденсаторы С подключен к электродам 2, а другой его зажим -к элек- В описанном преобразователе используются эффекты накапливания пространственных зарядов в плазме 4* 51 [0] [1] [2] [3] [4] [5] [6] [ 7 ] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] 0.011 |
|||||||||||||||||||||||||||||||||||||||||||