
|
|
|
Главная страница Механотроны [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [ 12 ] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] ного электрода. Такие характеристики мы будем называть подобными (в отношении нелинейности). По крутизне электронно-механических характеристик механотронов определяется статическая чувствительность преобразователя по току к измеряемой .механической величине (rj/a, riiF, riip и т. д.). Для всех указанных выше типов механотронных преобразователей важной статической характеристикой помимо рассмотренных является анодная характеристика механотронной системы преобразователя, которая для диодных механотронов имеет вид Д = /(а) при rfa.K =const, а для триодных механотронов -/а =/(f/a) при 4.С = const (или dc.k = const) и f/c = const. По этой характеристике графическим путем легко определить внутреннее дифференциальное сопротивление механотрона Ri. 2.2. РАСЧЕТ МЕХАНОТРОННЫХ ПРЕОБРАЗОВАТЕЛЕЙ Исходными данными при расчете механотронного преобразователя обычно являются его чувствительность по току (т1,м ) или по напряжению (гим ) к измеряемой механической величине М и диапазон измеряемых величин от М„,„ до М. Обычно задаются также чувствительность по току или по напряжению W электродной системы, частота собственных колебаний кинематической системы и габаритные размеры приборов. Целью расчета механотрона является определение основных размеров его электродной и кинематической систем по заданным параметрам. Решение этой задачи, как ясно из формул, приведенных в табл. 1.2 и 1.3, является неоднозначным. В связи с этим при разработке механотрона некоторые из размеров произвольно выбираются (обычно из конструктивных и габаритных скюбражений), а остальные - рассчитываются. В задачи расчета механотрона входит также определение тех его параметров, которые не установлены техническим заданием на разработку прибора. При расчете преобразователя, прежде всего из урав-НЕНпя (1.2), определяется чувствительность его кинематической системы к измеряемой величине (по перемещению подвижного электрода): а = Г,(„,м/Р;(„). (2.39) Затем, полагая основную характеристику кинематической системы линейной и используя выражение (1.6), п» максимальному значению измеряемой величины (Mmaj) определяется максимальное перемещение подвижного электрода (или электродов) механотрона; Aflf„„,-aM„,,. (2.40) По заданной чувствительности (или и найденному максимальному перемещению Мх определяются конструктивные параметры электродной системы механотрона. Найденная величина о является основным исходным Таблица 2.1
параметром при проектировании кинематических систем механотронных преобразователей. При проектировании механотронов очень важно оценить минимальное перемещение Ad„(„ подвижного электрода, соответствующее минимальной измеряемой механической величине и равное Мп,„ = М„,„. (2.41) Определяя уровень Ad„(„, следует учесть, что при измерении очень малых механических сигналов, соответствующих перемещению подвижного электрода Ad< <0,05 мкм, значительно возрастают требования к стабильности источников питания механотронов и, как правило, возникает необходимость в температурной стабилизации преобразователей. Это существенно усложняет конструкции измерительных приборов с применением механотронов и повышает их стоимость. Поэтому при проектировании механотронных преобразователей следует стремиться к тому, чтобы минимальное перемещение Ad,„ подвижных электродов, соответствующее минимальному измеряемому механическому сигналу, было бы больше 0,05 мкм. Общие схемы расчета различных механотронных преобразователей приведены в табл. 2.1. Ниже рассматриваются особенности расчета некоторых преобразователей, а также определяются конструктивные параметры кинематических и электродных систем механотронов различного назначения. Расчет кинематических систем механотронных преобразователей. Для механотронного преобразователя перемещений значение собственного измерительного усилия Р„, как правило, устанавливается техническим заданием на разработку прибора. Значение ао, входящее в формулу (2.5) для обычно определяется исходя нз максимального перемещения арабочего диапазона механотрона: причем коэффициент k для больщинства реальных конструкций механотронов лежит в пределах 0,5-1,3. Для специальных механотронов, предназначеииых для контроля легкодеформируемых объ-ектов, к которым особо предъявляется требование по уменьшению Ри, «о может быть выбрано равным (0,1-0,2) (Хтах- С учетом вышесказанного и используя (2.5), чувствительность Зр для механотронного преобразователя перемещений можно представить в виде ap = b -i-. (2.42) После определения из выражения (2.39) значения Ор, используя формулу (2.42), определяют основные размеры и материал деталей кинематической системы механотрона, что выполняется обычно в следующей последовательности: 1. Часть размеров системы мембрана-стержень, например и Дс, выбирается нз конструктивных и габаритных соображений. 2. Выбирается также материал мембраны с известными £ и р. При этом в качестве материала мембран механотронных преобразователей перемещений и усилий рекомендуется применять сплав ковар 29НК (£=1,4-104 н/м; (,i«U,3). 3. Отношение т/п плеч рычага кинематической системы определяется заранее по отношению чувствительностей tj и Т,- (или iua и и)- Реальная длина каждого плеча (т и п) определяется обычно в соответствии с заданием на общие габариты механотрона. При этом следует учитывать, что в большинстве случаев длина п штыря механотрона должна быть достаточной для крепления измерительного наконечника или какого-либо другого контактного приспособления. Из этих соображений делать штырь механотрона короче 10 мм обычно неудобно. Следует учитывать также, что с целью уменьшения механического гистерезиса при работе кинема-ти1шской системы длина штыря должна удовлетворять условию 4. Наконец, по выбранным величинам Dm. Dc, £ и ц и найденным значениям Ор, т я п определяется толщина материала мембраны механотрона. Для этого можно воспользоваться формулой (табл. 1.3, графа 2), если приведенная чувствительность кинематической системы ар=ар/тп не превышает 1 • 10-см-• сН-. Если Же ар>1-Ю-* см--сН-то при определении толщины материала мембраны следует пользоваться диаграммой, изображенной на рис. 1.18. Определение конструктивных параметров кинематической системы механотронного преобразователя усилий по известному значению чувствительности ар аналогично описанному выше. При проектировании механотронного преобразователя давления прежде всего выбирают тип упругого элемента в соответствии с рекомендациями, изложенными в § 1.5. Далее по рассчитанной чувствительности кинематической системы манотрона (табл. 2.1), основываясь на одной из формул, приведенных в табл. 1.3 (пп. 3, За, 4), определяют конструктивные параметры кинематической системы преобразователя. Например, из конструктивных и габаритных соображений задаются радиусом Ra и данными материала £ и ц плоской мембраны и по формуле табл. 1.3 (п. 3) рассчитывают толщину h материала мембраны. Сведения о материалах упругих элементов для различных преобразователей давлений можно найти в специальной литературе [32-34, 39]. В механотронах, предназначенных для измерения избыточных давлений и давлений, близких к атмосферному, в качестве упругих элементов часто используются плоские и гофрированные мембраны изготовленные из ковара марки 29НК (£=1,4-10» Н/м2; ц«0,3). Для удобства расчета этих мембран целесообразно использовать номограммы RM=f{h) при а =const, изображенные на рнс. 2.3 и 2.4. При расчете этих номограмм для гофрированных мембран  usirHi.s) 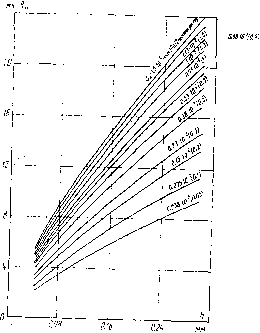 Рис. 2.3. Зависимо-сти JR,=f{h) пр.и "р =const для плоских мембран из ковара Рис. 2.4. Зависимости Лм=/(Л) при ap=const для гофрированных мембран из ковара с глубиной гофрировки Я/=0,4 (рис. 2.4) высота гофра Я принималась равной 0,4 мм, ширина гофра /- 1,33 мм (Я =«0,3), а коэффициент а в формуле для чувствительности aj, определяется из универсальных диаграмм, приведенных в [32]. Используя эти кривые по предварительно рассчитанной чувствительности к давлению Ор легко определить размеры мембран Ru и Л. Обычно радиус мембраны выбирается исходя из заданных габаритов манотрона, а толщина материала А определяется непосредственно по кривым рис. 2.3 и 2.4. Для гофрированных и плоских мембран важно определить также максимальный ход (прогиб) центра упругого элемента Womax соответствующий верхнему пределу измеряемых давлений Ртах- Щтах=рРтах- (2-43) При этом максимальный ход упругого элемента Woax не должен превышать его линейный ход Шол: max < «ол. (2.44) Нелинейность характеристик Wa=f(p) для плоской и гофрированной мембран не превышает 1% при выполнении следующих условий [4]: дад плоской мембраны даол< 0,128/г, (2.45) для гофрированной мембраны (2.46) где h - толщина материала мембран; а и b - постоянные коэффициенты, зависящие от формы профиля гофра и глубины гофрировки гофрированной мембраны и определяемые из диаграмм, приведенных в [4, 32]. В маиотронах обычно применяются гофрированные мембраны с синусоидальными гофрами при относительной глубине гофрировки Я 1>4 (табл. 1.3), для которых значение >а/6 - ие менее 25, а соотношение (2.46) имеет вид Вдол > 2,5Л. (2.46а) Из сравнения (2.45) и (2.46а) следует, что в отношении линейного хода гофрированные мембраны значительно превосходят плоские мембраны. Поэтому применение гофрированных мембран в манотроиах является предпочтительным, хотя по чувствительности dp эти-мембраны уступают плоским (табл. 1.3). Помимо увеличения линейного хода гофрировка мембраны стабилизирует ее геометрию. Гофрированная мембрана лучше плоской Противостоит посторонним механическим и температурным воздействиям, менее подвержена короблению и работает более стабильно. Чувствительность по давлению гофрированной мембранной коробки, складывающегося типа (см. табл. 1.3) примерно в 2 раза выше чувствительности одиночной гофрированной мембраны: °pW~2a(,). (2.47) Мембранная коробка не боится даже значительных внешних перегрузок. Действительно, при увеличении внешнего давления вы- [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [ 12 ] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] 0.0131 |