
|
|
|
Главная страница Механотроны [0] [1] [ 2 ] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] в механотронной преобразователе перемещений н усилий (рис. 1.3,а) входной механический сигнал (перемещение а или сила F) подается на внешний конец стержня 1, впаянного в мембрану 2, являющуюся частью вакуумной оболочки 3. При этом подвижный электрод - анод 4, укрепленный на внутреннем конце стержня, перемещается относительно неподвижного катода 5, что приводит к изменению анодного тока и выходного сигнала преобразователя. В механотронном преобразователе давлений, (мано-троне), изображенном на рис. 1.3,6, под воздействием измеряемого давления р мембрана 1 прогибается, в результате чего возникает перемещение подвижного анода 2 относительно катода 3, жестко связанного с оболочкой 4 механотрона. 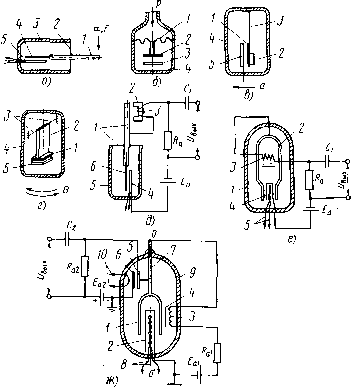 Рис. 1.3. Конструкции механотронных преобразователей различного назначения Механотронные преобразователи ускорений -акселерометры являются приборами инерционного типа, относительное смещение электродов в которых возникает за счет действия сил инерции. В механотронном акселерометре с внутренним управлением (рис. 1.3,0) подвижный анод 1 вместе с инерционной массой 2 укреплен на одном из концов плоской пружины 3. Второй конец пружины жестко связан с оболочкой 4 механотрона. При ускоренном движении акселерометра (ускорение а) за счет действия силы инерции на массу 2 и анод / последний смещается относительно катода 5. В механотронном преобразователе углов поворота (рис. 1.3,г) массивный анод / посредством держателя 2 укреплен на торсионном подвесе 3, причем концы тор-сиона связаны с оболочкой 4 механотрона. При повороте механотрона на угол 9 катод 5, жестко соединенный с оболочкой 4, также поворачивается на угол 9, а анод 1 остается в начальном положении благодаря действию на него силы тяжести и закручиванию тор-сиона. В результате этого в механотроне происходит относительное смещение анода и катода и соответствующее изменение анодного тока и выходного сигнала преобразователя. Для измерения параметров вибраций используются механотронные преобразователи инерционного типа, аналогичные изображенному на рис. 1.3,0. В качестве датчика частоты практически может быть использован любой механотронный преобразователь, снабженный системой возбуждения колебаний (например, электромагнитным приводом). На рис. 1.3,д приведена схема датчика частоты на основе диодного механотронного преобразователя перемещений, содержащего неподвижный катод 4 и подвижный анод 6. В качестве механического осциллятора i здесь использована система мембрана - стержень. Датчик снабжен электромагнитным приводом, состоящим из магнитного сердечника 2 и обмотки 3. При соответствующем включении этот датчик может быть использован как в качестве узкополосного фильтра, так и в качестве автогенератора [17]. На рис. 1.3,д изобра- жена схема включения датчика в режиме автогенератора, в которой при определенных условиях возбуждаются и устанавливаются незатухающие колебания с частотой, близкой частоте собственных колебаний системы мембрана-стержень. 2-1003 17 Наибольший практический интерес представляют собой механотронные преобразователи частоты с внутренней кинематической системой, выполненной в виде камертона, обладающего, как известно, высокой добротностью и высокой стабильностью собственной частоты. Такие механотронные преобразователи частоты получили название фонотронов. На рис. 1.3,е изображена схема диодного фонотро-на, включенного в режиме автогенератора. В вакуумном баллоне 1 расположены механический осциллятор-камертон 2, являющийся одновременно анодом прибора, электромагнитный привод 3, содержащий обмотку и магнитный сердечник, и катод 4 с подогревателем 5. Катод установлен между ветвями камертона и образует с последними диодную механотронную систему продольного управления, подвижным электродом которой является анод-камертон. Электромагнитный привод камертона также установлен между ветвями камертона, в его верхней части. Катод 4 электрически соединен с отрицательным зажимом источника анодного питания Е, а обмотка привода 3 через резистор соединена с положительным зажимом источника питания £3- В момент подключения фонотрона к источникам питания из-за переходных процессов в его анодной цепи возникают начальные колебания анодного тока. Поскольку анодный ток проходит через обмотку привода <?, его колебания создают переменное электромагнитное поле, которое через сердечник привода воздействует на камертон 2, вызывая перемещение его ветвей (анода) по отношению к неподвижному катоду. При этом межэлектродное расстояние анод - катод периодически меняется; в соответствии с этим изменяется анодный ток прибора. Эти изменения анодного тока, в свою очередь, воздействуют на камертон и т. д. Очевидно, при таком режиме осуществляется положительная обратная связь. Система «раскачивается» и начинает совершать незатухающие колебания. Как показывает теоретический анализ описанного явления [7J, частота этих колебаний близка частоте собственных колебаний камертона и отличается высокой стабильностью. Таким образом, в фо-нотроне происходит преобразование механических колебаний анода-камертона в гармонические колебания анодного тока прибора. Для устойчивой работы генератора на фонотроне необходимо выполнение известных условий баланса амплитуд и фаз [17]. Выходной сиг- нал фонотрона обычно снимается с межэлектродного промежутка прибора анод-катод через разделительный конденсатор Сь При использовании фонотрона в качестве фильтра частот обмотка привода является входом фильтра, а анодная цепь прибора -его выходом. На рис. \.2>,ж представлена схема механотронного преобразователя угловой скорости, разработанного на базе фонотрона [18-21]. В этом преобразователе кроме механотронной системы, образованной ветвями камертона 1 и катодом 2 с подогревателем 8, снабженной электромагнитным приводом с сердечником 4 и обмоткой 3, служащей для возбуждения автоколебаний камертона, имеется еще одна механотронная система,, содержащая катод 6, жестко соединенный с баллоном 9, и анод 5, механически связанный с ножкой 7 камертона. Преобразователь крепится на исследуемом вращающемся объекте таким образом, что его продольная ось совпадает с осью вращения объекта. При вращении преобразователя (вместе с объектом) относительно оси 00 возникает момент инерции, обусловленный действием сил Кориолиса, в результате чего ножка 7 камертона начинает совершать крутильные колебания, амплитуда которых пропорциональна угловой скорости и фиксируется второй механотронной системой с анодом 5. Выходной сигнал t/вых. снимаемый с преобразователя через разделительный конденсатор Сг, пропорционален угловой скорости вращающегося объекта. Процесс преобразования входной .механической величины М в выходную электрическую величину Э, происходящий в механотро-не, можно разделить на два этапа. На первом этапе механическая величина М преобразуется кинематической системой механотрона s линейное или угловое перемещение подвижных электродов Ad (или Д9). На втором этапе величина (или Д9) преобразуется электродной системой в изменение тока или напряжения, т. е. в электрическую величину Э. Зависимость между величинами Э и М - характеристика преобразования в общем случае может быть представлена выражением • 3=/(М). Обычно стремятся иметь линейную характеристику преобразования, т. е. прямо пропорциональную зависимость между изменением входной величины и соответствующим изменением выходной величины преобразователя. В случае линейного преобразования Характеристика преобразования механотрона при дальнейшем изложении будет называться также электронно-механической характеристикой. связь между входной и выходной величинами выражается уравнением 3 = yjm-f5o, (1.1) где 1] - постоянный коэффициент, а Эо - величина, характеризующая начальный режим преобразователя. Коэффициент пропорциональности ц в этом выражении является чувствительностью механотронного преобразователя к измеряемой механической величине. Выходной электрический сигнал Э механотрона может быть получен в виде изменения тока или напряжения. В соответствии с этим коэффициент преобразования т) называют чувствительностью механотрона по току т] г или по напряжению "Ци к измеряемой механической величине. Эффективность преобразования иа каждом этапе, в свою очередь, характеризуется чувствительностями Ч и о, причем чувствительность преобразователя г равна произведению и о: ri = Wa. (1.2) Величина - чувствительность электродной системы механотрона к перемещению Л его подвижного электрода определяется соотнощением (1.3) (при постоянных других электрических параметрах) или в дифференциальной форме Wddldn. (1.3а) в зависимости от того, в каких единицах указываются величины ДЭ и ДЛ, чувствительность может иметь размерность А/м, В/м, мкА/мкм и т. п. В дальнейшем чувствительность электродной системы механотрона по току будет обозначаться буквой Ч/, а по напряжению - буквой Ча. Величина а - чувствительность кинематической системы механотрона к измеряемой механической величине М, которая может быть силой, давлением, ускорением и т. д., определяется следующим соотнощением: а = ДЯ/АМ (1.4) (при постоянстве других механических параметров и внещних условий) или в дифференциальной форме о==дП1дШ. (1.4а) В зависимости от размерности величин ДМ и ДЯ чувствительность а может иметь размерность м/Н, м/м-с-, м/g-, м/Па и т. д. В дальнейшем чувствительность механотронных систем преобразователей и чувствительность их кинематических систем будет обозначаться буквами т1 и о с соответствующими индексами Например, чувствительность по току механотронного преобразователя усилий F будет обозначаться цр, а чувствительность его кинематической системы но перемещению к силе--О;?, чувствительность по напряжению механотронного преобразователя ускорений {о)~Цаа. а чувствительность его кинематической системы по перемещению к ускорению -Ой и т. д. Основной характеристикой кинематической системы механотрона является зависимость перемещения подвижного электрода от действующей механической величины. В случае, если под действием механической величины возникает линейное Ad или угловое А0 перемещение подвижного электрода, причем отсчет этого перемещения ведется от положения подвижного электрода, когда отсутствует действие внешней механической величины, т. е. от некоторого начального расстояния do или начального угла 9о, то основную характеристику кинематической системы можно представить в виде arf=:/(m) или де=/(м), (1.5) а выражения для а согласно (1.4а) соответственно в виде a = дid)дШ или а=(?(де)/(?М. (1.6) В общем случае характеристики (1.5) нелинейны. Однако при определенных условиях можно выбрать ограниченный участок этих характеристик - линейный, с заданной точностью. Если этот участок расположен около значений абсциссы do и Эо, то в его пределах чувствительность кинематической системы может быть определена как перемещение Ad (или Д9), приходящееся на единицу измеряемой механической величины: а = Д/М или а = Д6/М. (1.6а) Механотронная чувствительная система характеризуется обычно следующими статическими параметрами: внутренним дифференциальным сопротивлением R i, чувствительностью по току Ч""/ и чувствительностью по напряжению к перемещению подвижного электрода. Рассмотрим эти параметры на примерах вакуумных диодного и триодного механотронов. Под чувствительностью по току к перемещению понимается отношение приращения анодного тока А/а механотрона к вызвавшему его перемещению подвижного электрода АП при постоянных напряжениях на электродах механотрона: АД при Яа = const -для ДИОДНОГО механо- трона (fa-анодное напряжение); П;()=при Яа = сопз1 И L=const -для три- [0] [1] [ 2 ] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] 0.0188 |