
|
|
|
Главная страница Механотроны [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [ 37 ] [38] [39] [40] нейной деформации биоткани. Значение Да отсчиты-вается по шкале выходного прибора ИП. Степень эластичности Л исследуемой биоткани определяется из выражения Л = Да/F, где f - сила, создаваемая разновесами, установленными на весоприемном элементе, сН; Да - линейная деформация биоткани, мкм. С целью расширения функциональных возможностей прибора индентор 5 выполнен сменным, причем каждый из применяемых инденторов отличается от другого формой и величиной поверхности соприкосновения с исследуемым объектом. Механотронный биоэластометр имеет следующие технические характеристики: Диапазон контролируемой эластичности (податливости), мкм/сН........... Рабочий диапа.з.о« перемещений индентора, мм . Погрешность измерения эластичности, %, не более 0-4; 0-40 Описанный биоэластометр применяется в экспериментальной хирургии (например, для определения степени эластичности биотканей и органов после консервации), в онкологии при определении жесткости опухолевых заболеваний, в косметологии для определения эластичности тургора кожи и в других областях медицины и биологии. ГЛАВА ВОСЬМАЯ ДРУГИЕ ПРИМЕНЕНИЯ МЕХАНОТРОННЫХ ПРЕОБРАЗОВАТЕЛЕЙ 8.1. ПРИМЕНЕНИЕ МЕХАНОТРОНОВ В ГИДРО- И АЭРОМЕТРИЧЕСКИХ ПРИБОРАХ В настоящее время для измерения скорости и давления внутри потока жидкости или воздуха находят применение гидро- и аэрометрические приборы с механотронными датчиками маятникового и мембранного типов [95-98]. Действие маятникового датчика основано на использовании зависимости выходного электрического сигнала механотрона от сопротивления при пространствен- НОМ обтекании потоком приемного элемента в виде круглой пластинки или шара. При этом происходит смещение штыря механотрона, пропорциональное силе действия потока на приемный элемент. Связь между скоростью потока и силой действия на приемный элемент датчика определяется следующим уравнением [95]; где сила, возникающая в результате сопротивле- ния тела (приемного элемента) при его пространственном обтекании потоком жидкости (газа); С - безразмерный коэффициент сопротивления, величина которого Рис. 8.1. Однокомпонентный датчик скорости течения жидкости Рис. 8.2. Двухкомпонентный датчик для измерения малых значений вектора скорости течения жидкости 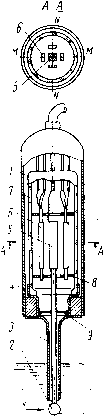 зависит от формы приемного элемента; р - плотность жидкости (газа); 5 - площадь наибольшего сечения приемного элемента, перпендикулярного направлению потока; v - скорость потока. На рис. 8.1 показана конструкция механотронного гидрометрического датчика маятникового типа. Датчик состоит из приемного элемента /, цилиндрического обтекателя 2, удлиненного штыря 3, корпуса 4, внутри которого проходят электрические провода, соединяющие механотрон 5 с измерительной схемой. Принцип работы этого датчика состоит в смещении приемного элемента / при давлении на него потока жидкости и передаче этого смещения непосредственно на штырь механотрона, что вызывает перемещение подвижного анода последнего. В рассмотренном датчике чаще всего ислользуются сверхминиатюрные механотроны типов 6МХ1Б, 6МХ2Б, 6МХ8Б. Собственная частота колебаний датчика составляет 80-100 Гц, а диапазон измеряемых датчиком скоростей потока лежит в пределах 1-200 см/с [96]. Описанный датчик является однокомпонентным и позволяет определить только одну составляющую скорости потока. Однако при решении задач, связанных с изучением турбулентности потоков жидкости, возникает необходимость измерения не только величины, но и направления скорости потока, т. е. измерения по крайней мере двух составляющих скорости потока. Двухкомпонентный механотронный датчик, изображенный на рис. 8.2, позволяет фиксировать две составляющие плоскостного вектора скорости потока. Датчик состоит из двухкоординатного механотронного преобразователя перемещений и усилий /, на конце штыря которого укреплен шарообразный приемный элемент 2, цилиндрического обтекателя 3 и корпуса 4. Подвижный анод 5 механотрона имеет форму призмы квадратного сечения, причем напротив каждой из четырех граней призмы располагаются четыре неподвижных катода 6, связанных с баллоном 7 механотрона посредством слюдяных изоляторов 8. Датчик имеет две оси наибольшей чувствительности ММ и NN, совпадающие с осями прямоугольной системы координат, а мембрана 9 механотрона выполняет роль динамометрической упругой системы. Принцип действия датчика состоит в том, что при воздействии на приемный элемент (шар) потока жидкости происходит смещение штыря механотрона в произвольном направлении, причем каждая из двух механотронных систем, расположенных по осям ММ и NN, фиксирует величину одной из составляющих вектора скорости потока. По измеренным значениям этих составляющих может быть рассчитан модуль вектора скорости потока. При погружении приемного элемента датчика в поток жидкости отмечают расположение его осей чувствительности ММ и NN, что позволяет в дальнейшем по измеренным составляющим вектора потока определить направление вектора скорости контролируемого потока. Частота собственных колебаний описанного датчика составляет 100 Гц, а диапазон измеряемых датчиком скоростей потока (по каждой из осей координат) лежит в пределах 1-300 см/с. Путем введения в конструкцию датчика дополнительной трубки, расположенной коаксиально относительно штыря механотрона, удается значительно расширить диапазон измеряемых скоростей потока до 5 м/с. Механотронный гидрометрический датчик мембранного типа (рис. 8.3) состоит из специального мембранного дифференциального манометра с механотроном 1 и трубкой Пито, выполняющей роль приемного элемента. Дифференциальный манометр разделен металлической или резиновой мембраной 2 на рабочую камеру 3 и камеру 4, в которой создается противодавление жидкости для компенсации постоянной составляющей давления («статического» давления) на различных глубинах потока. При этом камера 3 соединена с внутренним каналом 5 трубки Пито, отверстие которого направлено навстречу скорости потока, а камера - с внешним каналом 6 трубки Пито, который имеет четыре отверстия, распо- Рис. 8.3. Датчик динамического давления жидкости с гидрометрической трубкой 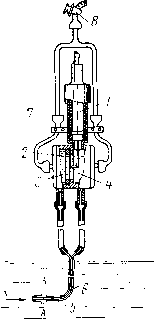 ложенных в сечении А-А, причем их оси перпендикулярны вектору скорости потока. Перед началом измерений из рабочих полостей камер 3 я 4 через шланги 7 и кран 5 откачивается воздух и камеры 5 и заполняются жидкостью, в которую погружен зонд с трубкой Пито, Динамическое давление потока передается на мембрану манометра только через внутренний канал трубки Пито. Отверстия внешнего канала 6 этой трубки располагаются на таком расстоянии от конца трубки, где динамическое давление, действующее на боковую поверхность трубки, равно нулю. Поэтому жидкость в эти отверстия попадает только под дейст-" вием гидростатического давления, величина которого зависит от глубины погружения зонда. Описанный мембранный датчик обеспечивает надежное измерение динамического давления внутри потока жидкости в пределах 1,33-2,66-103 Па (0,01-20 мм рт, ст.) при использовании в датчике тонких резиновых мембран. Инерционность этого датчика составляет менее 0,1 с, тогда как инерционность обычной трубки Пито со стеклянным дифференциальным манометром равна нескольким минутам [95]. Практическое применение описанных механотронных датчиков показало, что они надежны и просты в эксплуатации, позволяют производить измерения с точностью до 2% и могут успешно использоваться при исследовании кинематической структуры потока не только жидкостей, но и газа [98]. 8.2. ПРИМЕНЕНИЕ МЕХАНОТРОНОВ В ИСПЫТАТЕЛЬНОЙ АППАРАТУРЕ ДЛЯ ТЕХНИЧЕСКОЙ ДИАГНОСТИКИ МАШИН И МЕХАНИЗМОВ Датчики механических величин на основе механотронов с успехом применяются для решения различных задач сельскохозяйственной техники [99], и в первую очередь для технической диагностики сельскохозяйственных машин (СМ). Это обусловлено тем, что механотронные датчики обладают необходимой чувствительностью, стойкостью к механическим перегрузкам, простотой конструкции и электрических схем. Кроме того, они приспособлены к работе в полевых условиях, так как используют помимо прочего низкие напряжения питания и отличаются повышенной пылезащищен-ностью. Механотронный силоизмерительный датчик (рис. 8.4) для диагностической аппаратуры СМ содержит СИЭМ с упругой системой / рамного типа (см. рис, 5.14). Упругая система СИЭМ вместе с механотроном 2 в кожухе 3 жестко укреплена на основании 4 с помощью винтов 5 и размещена внутри стального кожуха 6, экранирующего СИЭМ от магнитных полей, возникающих при работе диагностического оборудования, и механических повреждений. На кожухе укреплен электроконтактный разъем 7, соединенный с панелькой 8, которая установлена на цоколе механотрона. Для предохранения от недопустимых перегрузок в конструкции датчика предусмотрены ограничители хода упругой системы СИЭМ, выполненные в виде одного или двух винтов 9. Зазор б между ними и подвижной колодкой СИЭМ поддерживается примерно в 1,2- 1,5 раза большим рабочего хода упругой системы. Кожух снабжен защитной втулкой 10 из эластичного материала (например, резины) и является пыленепроницаемым. В диагностическом оборудовании СИЭМ устанавливается на основании 4 и крепится винтами (или болтами), проходящими через отверстия 11, предусмотренные в этом основании. 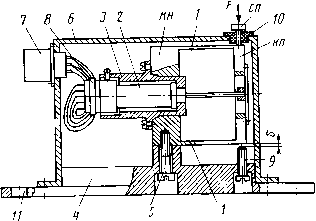 Рис. 8.4. Конструкция механотронного силоизмерительного. датчика для диагностических стендов: КП и КН -подвижная и неподвижная колодки СИЭМ, СП - силовосприни- мающая площадка [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [ 37 ] [38] [39] [40] 0.0133 |