
|
|
|
Главная страница Механотроны [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [ 18 ] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] быть не менее чем в 10 раз больше уровня его собственных шумов. Собственные шумы электронных приборов с одним положительным электродом, т. е. при отсутствии токо-распределения (диоды, триоды с «отрицательной» сеткой), определяются наложением друг на друга трех видов шумов: дробового шума и двух видов низкочастотных шумов. Основным видом низкочастотных шумов является фликкер-шум [24], представляющий собой шум, обусловленный флюктуациями работы выхода малых участков поверхности катода и играющий при низких частотах решающую роль в общем балансе шумов. Физическая природа второго вида низкочастотных шумов пока полностью не ясна. Основной величиной, служащей для количественной оценки уровня шумов, является средний квадрат тока шумов, который для анодной цепи механотрона определяется как il.\S;,dJ, (2.72) где Sjg-спектральная плотность тока шумов в анодной цепи прибора; и fi -частоты на верхней и нижней границах полосы пропускания устройства. Для удобства сопоставления уровня шумов с изменением анодного тока механотрона вместо среднего квадрата лучше пользоваться эффективным значением шумового тока, которое связано с га.ш соотношением га.ш.эф = / га.ш- (2.73) Для вычисления щ по (2.72) необходимо знать спектры отдельных составляющих шумов, т. е. зависимость их спектральной плотности от частоты. Ход этих зависимостей и абсолютное значение их ординат определяются электрическим режимом работы прибора и видом примененного в нем катода. Механотроны по принципу своего действия всегда работают в режиме пространственного заряда, а в качестве катода в их современных конструкциях используется оксидный термокатод. Спектр фликкер-шум а в двойном логарифмическом масштабе представлен на рис. 2.19,а. Он состоит из горизонтального участка, простирающегося от самых низких частот до некоторой граничной частоты /д, и частотно-зависимого участка выше fg, который согласно [24] подчиняется закономерности (рнс. 2.19,а) 1 а.н ~ 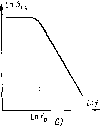
Рис. 2.19. Ход зависимости 1п 5<а.н=ф(1п/) (а), зависимости спектральной плотности Si а шума от частоты / (б) в плоском диоде с оксидным катодом для 7"к = 1070К, /а = 10 мА при rfa.K=0,37 мм (/), 0,6 мм (2) и 0,95 мм (3) и разложение спектра / на составляющие: г - фликкер-шум; /" - вторая составляющая низкочастотного шума; /" - дробовой шум где Si а.н - спектральная плотность фликкер-шума; а -коэффициент, зависящий от механизма работы катода и имеющий значения от 1 до 2; А - коэффициент, зависящий от режима работы прибора. Для оксидных катодов экспериментально найдено значение коэффициента а, равное 3/2. Поэтому в дальнейшем можно принять S; = - . (2.74) Значение коэффициента А, вычисленное по существующей теории фликкер-шума, резко расходится с результатами эксперимента. Его реальное значение легко найти по экспериментально снятому спектру (рис. 2.19,6) из ординаты при частоте fg [24, 48]. Если через 5анО обозначить спектральную плотность шума на участке спектра при f< /д, то из SJa.„g = 7(/о) следует (2.75) Спектр второй составляющей низкочастотного шума похож иа спектр фликкер-шума; отличие их заключается лишь в том, что здесь спектральные плотности меньше, частота перехода от горизонтального к частотно-зависимому участку /д (рис. 2.19,6) лежит около 450 Гц и что показатель а=2. Тогда на частотно-зависимом участке •5;а.и=-"/я. (2-76) где S" 3 и Л"-величины, аналогичные соответствующим величи-8-1003 "3 нам в (2.74). При этом А" практически определяется аналогично (2.75) по выражению "=5;a.„o(/;f. (2.77) где gл д-спектральная плотность на горизонтальном участке спектра второй составляющей низкочастотного шума при /</о. Спектральная плотность дробового шума 5,- др в пределах интересующего диапазона частот от частоты не зависит. Ее значение можно вычислить теоретически, однако результат обычно малоточен, так как в расчет входит ряд трудно контролируемых величин, связанных с условиями работы катода [24]. Практически др равно ординатам спектра на пологом участке, на который выходит спектр при высоких частотах. Спектры шумов в интересующем диапазоне частот были сняты на плоском диоде с оксидным катодом с площадью электродов 0,113 см2 и междуэлектродными расстояниями dg = 0,37; 0,60; 0,95 мм при температуре катода 1070 К и анодном токе 10 мА (рис. 2.19,6). На рис. 2.19,6 показано разложение спектра для <а =0,37 мм на составляющие по методике, описанной в [24]. Так как ход спектров составляющих низкочастотного шума не на всем своем протяжении определяется одними и теми же закономерностями, при интегрировании диапазон частот в пределах полосы пропускания устройства /г-/i целесообразно разбить на несколько частей, границы которых определяются частотами fi н /г и частотами /о " в точках перехода спектров от одной закономерности к другой. Так, при /К/о « f2>fo расчет~7д удобно выполнять по схеме /а.ш = j J S,adf+ j Sadf, (2.78) fo /о где 5;а = 5;g „ + S!, „ -f др. Для количественной оценки порога чувствительности диодной механотронной системы можно определить эффективный шумовой ток в ее анодной цепи, рассматривая следующие четыре типа систем: система I с полосой пропускания от fi = l Гц до fo=15 Гц; система II с полосой пропускания от /q=15 Гц до/д = 100 Гц; система III с полосой пропускания от fg =100 Гц до /2= = 1000 Гц; система IV с полосой пропускания от fi = l Гц до f2=1000 Гц. Так как у диодных механотронов расстояние между катодом и анодом во многих случаях составляет 0,3 - 0,4 мм, то для нахождения необходимых исходных данных можно воспользоваться представленным на рис. 2.19,6 спектром для d.n =0,37 мм и его разложе-114 нием на составляющие. При этом, проведя несложные вычисления f48j, получим следующие значения 1а.ш.9ф для систем I-IV: 4.ш.эф(1)« 1,06.10-3 мкА; 4.ш.эф(11)~ 1,37-Ю-» мкА; 4.ш.эф(1П)~ 2,16-10-3 мкА; га.ш.эф(1У)~ 2.76.10-3 кА. По величине га.ш.эф(1У) можно определить границу зоны, нечувствительности диодной механотронной системы: 5, 4.Ш.эф(1У) /~ h fo А У S,adf+[s,adf+[s,adf (2.79) 8™м=10-%-108з.„. гдеЧ; -чувствительность по току к перемещению механотронной системы. Так как минимальное перемещение б„,„ подвижного электрода, которое может быть зафиксировано механотроном с достаточной достоверностью, должно вызвать изменение анодного тока, хотя бы на один порядок превышающее эффективное значение тока шумов, то (2.80) Используя для расчета выражение Wi = 2IJda.k, получаем при с/а.к =0,37 мм и /а =10 мА W- = 54 мкА/мкм. Тогда значения о,„,„ и 0з.„ для рассмотренных выше механотронных систем составляют: для первой системы (с полосой пропускания от 1 до 15 Гц) 5 . =0,2.10-3 мкм = 2,0 А и 8 =0,2 А; для второй системы (с полосой пропускания от 15 до 100 Гц) 8". =0,35.10-3 мкм = 3,5 А и 8" =0,35 А; mm з.н ДЛЯ третьей системы (с полосой пропускания от 100 до 1000 Гц) 81". =0,4-10- мкм =4,0 А и 8 = 0,4 А; для четвертой системы (с полосой пропускания от 1 до 1000 Гц) min = 0,51-10- мкм = 5,1 А и 5v = 0,51 А. Приведенный расчет показывает, что диодная механотронная система при измерении механических сигналов (перемещений) в частотном диапазоне 1-1000 Гц имеет порог чувствительности порядка десятых долей ангстрема. Следует отметить, что для количественной оценки уровня шумов /а.ш.эф И ЗОНЫ НечуВСТВИТСЛЬНОСТИ бз.н механотронных систем в рассмотренном выше случае были использованы экспериментальные данные (рис. 2.19,6), полученные на хороших оксидных катодах, прошедших тщательную технологическую обработку и работающих в оптимальных режимах. Поэтому приведенные выше данные для 4.ш.эф и К.« следует считать близкими к минимально возможным значениям. Как было показано в [48], в серийных механотронах величина зоны нечувствительности может достигать единиц ангстрема. Уровень низкочастотных шумов в триодах с отрицательным потенциалом сетки (Lc<0) в основном равен шуму, создаваемому катодом триода [48], т. е. в этом режиме можно считать, что /а.ш.эф(триода) = га.ш.эф (диода). Поэтому для триодных механотронных систем, работающих в режиме <0, при оценке зоны нечувствительности можно принять ту же величину, что и для диодной системы. Уровень шумов в триодах возрастает при Uc >0 в основном за счет появления новой составляющей - низкочастотного шума токораспределения. Однако даже при положительном потенциале сетки, равном нескольким вольтам, возрастание уровня низкочастотного шума в триоде составляет не более 5% [48]. Зону нечувствительности механотронных систем необходимо учитывать при расчете и конструировании высокочувствительных механотронных преобразователей конкретного назначения. Так, при разработке механотрона 6МХ1Б для измерения микронеровностей поверхности деталей в про-филометрии расчет зоны нечувствительности по описанной выше методике позволил правильно определить конструкцию и рабочий режим механотрона, а также 116 установить минимальную цену деления (20 А) про-филометра модели 253. С учетом зоны нечувствительности механотронной системы рассчитывалась конструкция и рабочий режим механотронного преобразователя перемещений и усилий типа 6МХ9Б, предназначенного для регистрации очень малых переменных усилий, создаваемых сокращающимися одиночными мышечными волокнами. Минимальное фиксируемое этим механотроном перемеще- ние 6„1„ принималось равным 10"* мкм (10 А), а чувствительность Ор его кинематической системы выбиралась равной 100 мкм/сН. При этом минимальное усилие которое можно измерить этим механотроном, определялось как Fi„ = =lO- сН. ар ГЛАВА ТРЕТЬЯ ИЗМЕРИТЕЛЬНЫЕ СИСТЕМЫ НА ОСНОВЕ МЕХАНОТРОННЫХ ПРЕОБРАЗОВАТЕЛЕЙ 3.1. РАБОТА МЕХАНОТРОННЫХ ПРЕОБРАЗОВАТЕЛЕЙ В ИЗМЕРИТЕЛЬНЫХ СХЕМАХ Простейшие измерительные схемы на основе диодного и триодного механотронов представлены на рис. 3.1,а и б. Они состоят из механотрона, анодной нагрузки R i, отсчетного прибора ИП с внутренним сопротивлением Rn и источника анодного питания с внутренним сопротивлением R„, соединенным последовательно. В измерительную схему с триодным механотроном (рис. 3.1,6) входит также источник постоянного сеточного напряжения Ее- Рабочая чувствительность по току механотронного преобразователя, включенного по схеме рис. 3.1, определяется выражением [4] (3.1) dM l-{-(R, + R„-{-R«)IRi где 1 - статическая чувствительность механотронно го преобразователя по току к измеряемой механической [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [ 18 ] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] 0.0115 |