
|
|
|
Главная страница Механотроны [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [ 36 ] [37] [38] [39] [40] при подготовке датчика к работе измерительный резервуар, образованный колпачком 2 и мембраной 5 манотрона, заполняется физиологическим раствором. Это делается с помощью обычного шприца, игла которого вводится в резервуар через пробку 4. После заполнения измерительного резервуара физиологическим раствором и удаления из него пузырьков воздуха игла датчика 5 вводится между позвонками позвоночника в область ликвора. При этом ликворная жидкость в небольшом количестве попадает в полость иглы 3, создавая давление на мембрану манотрона. Выходной сигнал манотрона, пропорциональный ликворному давлению, отсчитывается по шкале стрелочного прибора в диапазоне 0-30 мм рт. ст. с погрешностью не более 3% либо регистрируется самописцем, который подключается к измерительной схеме манотрона. Для измерения пульсаций давления в дыхательных путях наркотизированных животных разработан высокочувствительный манометрический датчик избыточного давления, который содержит (рис. 7.6) металлическое основание /, механотронный преобразователь 2, установленный на основании в специальном креплении 3 с хомутиком 4, и мембранную коробку со штуцером. Мембранная коробка складывающегося типа выполнена из двух эластичных мебран, имеющих большую эффективную поверхность, что обеспечивает очень высокую чувствительность к давлению указанной коробки. 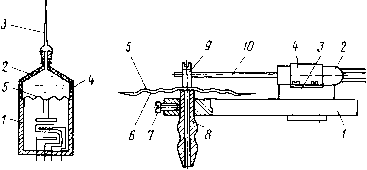 Рис. 7.5. Маио-троииый датчик ликвориого давления Рис. 7.6. Высокочувствительный механотронный датчик для регистрации пульсаций давления в дыхательных путях Мембранная коробка закреплена на основании 1 с помощью винта 7. Нижняя мембрана коробки соединена со штуцером 8, а центр верхней мембраны посредством втулки 9 соединен со штырем 10 механотрона. В качестве механотронного преобразователя в манометрическом датчике применен механотрон типа 6МХ2Б. При работе прибора штуцер 8 мембранной коробки посредством резинового шланга соединяется с дыхательными путями животного. При этом в момент выдоха давление в полости мембранной коробки возрастает, коробка «раскрывается», т. е. верхняя мембрана перемещается относительно нилней мембраны и относительно основания. Перемещение верхней мембраны вызывает перемещение конца штыря 10 механотрона, что, в свою очередь, вызывает перемещение подвижного анода относительно катода. Последнее приводит к разбалансу измерительного моста и появлению выходного сигнала механотрона, пропорционального измеряемому давлению. Технические характеристики прибора: Диапазон измеряемых давлений, мм рт. ст. Нелинейность характеристики в рабочем диапазоне, %, не более............. 2 Погрешность измерения, %, не более......3 ±5 и ±50 7.3. ПРИМЕНЕНИЕ МЕХАНОТРОНОВ В ДРУГИХ МЕДИЦИНСКИХ ПРИБОРАХ При проведении различных офтальмологических исследований актуальным является измерение внутриглазного давления (ВГД) прямым способом в эксперименте и в клинических условиях (витреоэктомия, фа-коэмульсификация и т. п.). Задача непосредственного измерения ВГД прямым способом возникает также при контрольной тарировке различных тонометров - приборов для измерения ВГД косвенным методом (например, путем измерения величины деформации роговицы глаза под действием фиксированной нагрузки). Для решения этих задач на основе манотрона 6МДХПС разработан механотронный датчик ВГД [94]. Конструкция механотронного датчика ВГД аналогична конструкции датчика ликворного давления (рис. 7.5). При использовании датчика ВГД его шпри-цевая игла вводится в полость глаза. Выходной сигнал манотрона 6МДХ11С, пропорциональный ВГД, отсчи- 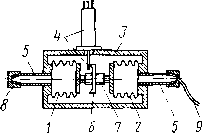 Рис. 7.7. Механотронный датчик цистомано-графа: /, 2 -сильфоны; 3 - корпус; i - механотрои; 5 - штуцер; б - гайка; 7 - втулка с резьбой; S -заглушка; 9 - катетер тывается по шкале стрелочного прибора либо регистрируется самописцем. Рабочие диапазоны механотронного датчика ВГД О-50 и О-30 мм рт. ст. Остальные его технические характеристики аналогичны характеристикам механотронного датчика ликворного давления (рис. 7.5). Механотронные манометрические датчики успешно применяются также для измерения давления в полых органах, например, в кишечнике, желудке, мочевом пузыре и пр. В цистоманографе ЦМГ-1, предназначенном для измерения и регистрации давления жидкости в мочевом пузыре, применен двухбаллонный дифференциальный манометрический датчик (рис. 7.7), в котором в качестве упругих чувствительных элементов использованы сильфоны из нержавеющей стали. Конструкция этого датчика в основном аналогична конструкции универсального дифференциального манометрического датчика (см. рис. 6.3). Давление в измерительном баллоне сравнивается с давлением в эталонном баллоне, которое поддерживается постоянным и равным атмосферному. Для поддержания постоянства давления в эталонном баллоне его штуцер герметично зыкрыт заглушкой. Перед началом работы цистоманографа его измерительный баллон стерилизуется, заполняется фурацили-ном и с помощью катетера 9 соединяется с мочевым пузырем пациента. Цистоманограф ЦМГ-1, в состав которого входит самописец КСП-4, имеет следующие технические характеристики: Диапазоны измеряемых давлений .......0-9,8-103 Па (0-100 см вод. ст.) О-19,6-103 Па (О-200 см вод. ст.) Основная погрешность, %, не более.......2,5 При проведении различных исследований в стоматологии и косметологии важным и актуальным является измерение силовых факторов опорного аппарата зубов и губ, например измерение усилий сжатия зубов, усилия, развиваемого круговой мышцей рта, усилия прижатия губ к деснам и т. п. Эти измерения производятся различными стоматологическими динамометрами. Конструкция механотронного стоматологического динамометра изображена на рис. 7.8. Динамометр состоит из механотронного датчика и измерительного блока, содержащего мостовую измерительную схему и источники питания механотрона. Механотронный датчик содержит фигурный корпус 1, в который вмонтирован и укреплен винтами 2 механотронный силоизмерительный элемент (СИЭМ) 3. СИЭМ состоит из подвижной 4 и неподвижной 5 колодок, соединенных двумя плоскими пружинами 6, и механотрона 7, баллон которого жестко связан с неподвижной колодкой 5, а внешний конец его управляющего стержня - с подвижной колодкой 4. На подвижной колодке СИЭМ с помощью винтов 8 закреплена втулка 9. В посадочные отверстия втулки 9 и корпуса / устанавливаются и закрепляются винтами 10 съемные насадки И и 12, которые непосредственно воспринимают усилие F сжатия зубов или губ. Насадки И я 12 обычно выполняются из оргстекла или эбонита. Провода 13, обеспечивающие подачу напряжений на электроды механотрона, закреплены в корпусе 1 с помощью втулки 14, выполненной из изоляционного материала. Описанный стоматологический механотронный динамометр работает следующим образом. Насадки И и 12 динамометра устанавливаются между соответственно верхней и нижней губами и деснами-пациента. Затем измерительный прибор ИП устанавливается на нуль. После этого пациент сжимает губы, что сопровождается сокращением круговой мышцы рта. 11 9 8 If 5 5 7 г 1kn 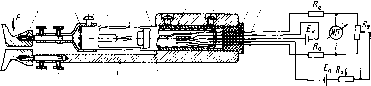 II 10 1 3 Развиваемое при этом усилие сжатия воздействует на насадки и 12, вызывая перемещение подвижной насадки 11, закрепленной на подвижной колодке 4 (СИЭМ), относительно неподвижной насадки 12, жестко связанной с корпусом / датчика. Таким образом, под воздействием усилия F происходит перемещение подвижной колодки СИЭМ относительно его неподвижной колодки 5, причем величина этого перемещения определяется жесткостью пружин 6 силоизмерительного элемента. Перемещение подвижной колодки СИЭМ относительно неподвижной его колодки приводит к смещению щтыря механотрона, что, в свою очередь, вызывает перемещение подвижного анода относительно катода механотрона и изменение тока подвижного анода. Изменение тока подвижного анода приводит к разбалансу мостовой измерительной схемы, причем напряжение разбаланса, измеряемое прибором ИП, пропорционально контролируемому усилию сжатия. Динамометр имеет следующие технические характеристики: Диапазоны измеряемых усилий, Я.....05; О-Ю; 0-50; 0-500 Максимальная чувствительность по току к усилию, мкА/Н..........10 Погрешность измерения, %, не более .... 3 Прибор для измерения и регистрации тремора («дрожания») конечностей больных гиперкинетическим синдромом содержит механотронный датчик ускорения инерционного действия, измерительный электроблок и самописец. Датчик прибора (рис. 7.9) представляет собой двухкоординатный механотронный акселерометр. В датчике применен двухкомпонентный механотронный преобразователь перемещений 1, на щты-ре 2 которого укреплена инерционная масса 3, погруженная вместе со щтырем в демпфирующую жидкость 4 демпфера 5. Вдоль граней подвижного анода 6 механотрона расположены две пары катодов 7. 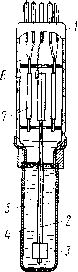 Рис. 7.9. Механотронный датчик треморографа Описанный треморограф имеет следующие основные технические характеристики: Диапазоны измеряемых ускорений, м/с .... 0.2; О-20 Погрешность измерения, %, не более .... 5 Механотронный биоэластометр (рис. 7.10)-прибор для определения степени эластичности (податливости) биотканей (например, кожи человека) содержит механотронный преобразователь линейных перемещений (деформаций), весоприемное устройство с индентором и разновесами и измерительный электроблок, к которому при необходимости подключается самописец. Измеритель деформации кожи представляет собой упругую систему, содержащую цилиндрический корпус /, две круглые плоскопараллельные пружины 2 и 3, жестко соединенные по контуру с корпусом. Центры пружин соединены с весоприемным элементом 4 и с индентором 5 посредством подвижного щтока 6, причем щток, в свою очередь, с помощью специальной пружины 7 соединен со щтырем механотрона 8, баллон которого жестко связан с корпусом измерителя деформации. Индентор 5 устанавливается на контролируемом объекте, например на участке кожи пациента. Для обеспечения , высокой эластичности пружины 2 и 3 имеют фигурный вырез. При нагружении посредством разновесов 10 весо-приемного элемента 4 силой F происходит деформация биоткани и перемещение щтока 6 в направлении, перпендикулярном плоскостям пружин 2 и 3, что, в свою очередь, вызывает перемещение щтыря механотрона 8 и приводит к возникновению напряжения разбаланса в мостовой измерительной схеме, причем возникающий выходной сигнал механотрона пропорционален Да ли- 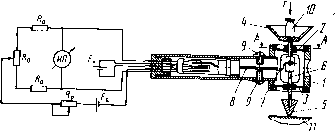 Рис. 7.10. Механотронный биоэластометр [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [ 36 ] [37] [38] [39] [40] 0.0141 |