
|
|
|
Главная страница Периферийные измерительные устройства [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [ 31 ] [32] [33] [34] [35] Рис 4.33. Мнемосхема п. ВОЙ индикации по сравнению с визуальным совмещением с помощью микроскопа. Сокращению времени совмещения способствовала очень простая мнемосхема алгоритма работы установки (рис. 4.33). Метки на кремниевой пластине изображены двумя взаимоперпендикулярными линиями, две первые совпадают с линией Л, а третья направлена вдоль линии Б. Перемещение любой из линий до совпадения с одной из трех точек, изображающих ЧЭ, вызывает загорание лампочки указания положения линии. Наличие информации о положении линий относительно средних точек ЧЭ позволяет исключать ложные перемещения по направлениям х, у, ф. Информация о положении линий в зоне ЧЭ шириной ±1 мм может легко использоваться для автоматизации процесса совмещения, для экономии ручного труда, а также для исключения субъективных ошибок совмещения при ручном режиме. С этой целью последующая технологическая операция блокируется, если отсутствует сигнал совмещения одновременно от трех считывающих элементов. Предложенный нами метод совмещения по трем линиям в отличие от метода совмещения по двум точкам позволяет решить задачу автоматизации позиционирования, не прибегая к круговому сканированию [121] подвижного объекта. Значительное упрощение установки и алгоритма позиционирования получено, благодаря использованию трех КЭ, каждый из которых выполняет позиционирование при одновременном перемещении. 4.12. Устройство позиционного у автоматизированными подвижнь и объектами Описанное ниже устройство относится к системам управления местоположением или курсом и может быть применено для управления подвижными роботами, роботами-манипуляторами, грузоперемещаю-щими механизмами, распределительными тележками и другими транспортными средствами, перемещающимися по искусственно обозначенным траекториям. Известны устройства для позиционного управления, использующие оптическую следящую систему за курсовой контрастной полосой, нанесенной белой краской или выполненной в виде ленты из алюминиевой фольги [122]. Они характеризуются низкой помехоустойчивостью отслеживания курсовой полосы, которая зависит от расстояния между ЧЭ и курсовой полосой, незначительных загрязнений, пыли, дефектов полосы, неравномерности освещения рабочей зоны, снижения интенсивности светового потока по времени. Поэтому устройствам с оптической следящей системой предъявляются жесткие требования к стабилизации высоты ЧЭ над курсовой полосой и к состоянию контрастной курсовой полосы, что вызывает значительные неудобства при эксплуатации. 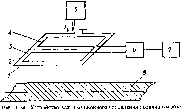 Другие устройства управления безрельсовыми подвижными объектами в качестве курсового указателя используют электромагнитное поле кабеля, проложенного вдоль пути следования, по которому протекает электрический ток [123]. Такие устройства, как и оптические, обладают низкой помехоустойчивостью отслеживания курса, которая зависит от расстояния между ЧЭ и курсовым кабелем и наличия металлических предметов в районе кабеля. Кроме того, кабель необходимо подключить к источнику ЭДС и образовать замкнутый контур тока. Принципиально новым решением является использование пассивной курсовой полосы в виде двухпроводной линии, а в качестве считывающего элемента - индуктивного полоскового трансформатора. - Структурная схема устройства для позиционного управления подвижными объектами изображена на рис. 4.34. Оно состоит из чувствительного элемента /, содержащего рамку возбуждения 2, подключенную к генератору импульсов тока 5, и две индуктивно связанные с ней равновеликие съемные рамки 3 а 4, расположенные в плоскости, параллельной рамке"возбуждения 2, разделяющие площадь рамки вовбуждения на две равные части вдоль траектории движения и включенные встречно по отношению друг к другу; блока различения сигналов б, выходы которого подключены к съемным рамкам; регулятора направления движения 7, подключенного к блоку различения сигналов, и курсовой полосы 8, выполненной из проводящего материала. Устройство работает следующим образом. Генератор 5 выдает периодические импульсы тока прямоугольной формы в рамку возбуждения 2. Во время нарастания фронта импульса тока k = /» (1 - где /в - амплитуда импульса тока; т - постоянная времени нарастания фронта импульса, вокруг шины, образующей рамку возбуждения 2, создается нарастающее во времени практически с постоянной т магнитное поле. Поскольку между рамкой возбуждения 2 и съемными рамками За 4 существует взаимная индуктивная связь, то в съемных рамках в момент нарастания фронта импульса тока индуцируются импуль- сные сигналы, амплитуда которых пропорциональна площади съемных рамок e=MS. (4.48) Съемные шины 3 и 4 включены встречно, поэтому результирующий сигнал на нх выходе равен разности сигналов, индуцированных в съемных рамках. Так как площади съемных рамок 3 н 4 одинаковы, то в них индуцируются сигналы одинаковой амплитуды, т. е. ej = е„ и результирующий сигнал на выходе блока различения 6 врез = е,- - = 0. Магнитное поле рамки возбуждения 2 не только индуцирует импульсные сигналы в съемных рамках 3 и 4, но и взаимодействует с курсовой полосой 8, выполненной в виде сплошной токопроводящей ленты (или стрежня) или двух параллельных проводов, замкнутых на концах между собой и образующих замкнутый контур. В первом случае в результате проникновения в металл проводящей полосы магнитного поля тока рамки возбуждения в полосе возникают вихровые токи, магнитное поле которых по закону Ленца направлено встречно магнитному полю тока рамки возбуждения. Аналогично возникает магнитное поле тока, индуцированного в курсовой полосе в виде проводникового контура, образованного замкнутыми на концах параллельными проводами. Магнитное поле тока рамки возбуждения охватывает проводниковый контур курсовой полосы. В момент нарастания фронта импульса тока в указанном контуре индуцируется ток, направление которого противоположно направлению тока в рамке возбуждения. Поэтому и магнитное поле тока, индуцированного в контуре, образующем курсовую полосу, направлено встречно полю тока рамки возбуждения. Металлический стержень или трубу, образующих курсовую полосу, можно рассматривать как металлическую ленту, в которой индуцируются вихревые токи. В результате вычитания полей токов рамки возбуждения и курсовой полосы потокосцепленне рамки возбуждения и съемных рамок }тленьшается. Это уменьшение характеризуется коэффициентом модуляции магнитного поля б = MJM, где М„ - взаимная индуктивность рамки возбуждения и съемных рамок при наличии курсовой полосы. Если ось курсовой полосы совпадет с границей раздела съемных рамок 3 н 4, то ослабление потокосцепления съемных рамок 3 н4 с курсовой полосой будет одинаковым (ерез = 0): е,-е, = Ш1--, (4.49) где / - длина съемных рамок; b - ширина курсовой полосы; /- - площадь курсовой полосы, ограниченная проекцией на нее одной съемной рамки. При смещении оси курсовой полосы относительно границы раздела съемных рамок модулируемое магнитное поле, воспринимаемое съемными рамками 3 н 4, изменяется. Соответственно изменяются и индуцированные в них сигналы: в одной рамке амплитуда сигнала увели- чивается, в другой - уменьшается. Это изменение пропорционально изменению площадей курсовой полош, ограниченных проекциями на нее съемных рамок 3 и 4: ?i = 6M/(-f+Ах)-, в, = бМ/(4-Ах)4-. (4.50) При смещении оси курсовой линии в стороны первой съемной рамки результирующий сигнал на выходе съемных рамок ерез. = 2бМ/Ах-. При смещении в сторону второй съемной рамки ерез. = -2бМ/Ах-§-, (4.51) (4.52) т. е. смещение осн курсовой относительно границы раздела съемных рамок в ту или другую сторону вызывает появление импульсных сигналов на выходе съемных рамок положительной или отрицательной полярности. Эти сигналы поступают в блок различения сигналов 6, построенный по схеме дифференциального усилителя. Прн совпадении оси курсовой полосы с границей раздела съемных рамок Зн4на выходе съемных рамок и соответственно на выходе блока различения 6 сигналы отсутствуют. Появление сигнала положительной полярности на выходе съемных рамок и аналогично преобразованному в стандартную форму сигналу на выходе блока 6 соответствует смещению ЧЭ в одну сторону относительно осн курсовой полосы. Появление отрицательного сигнала соответствует смещению ЧЭ в другую сторону. Отслеживание курсовой полосы автоматизированным подвижным обьектом заключается в том, что ЧЭ располагается на подвижном объекте и ориентирован таким образом, чтобы граница раздела съемных рамок была ориентирована вдоль направления движения. При движении подвижного объекта, если граница раздела съемных рамок совпадает с осью курсовой полосы, то на выходе схемы различения сигналов 6 сигнал равен нулю. В регулятор направления движения сигнал не поступает, и объект продолжает двигаться без изменения направления. Если подвижный объект сместился относительно курсовой полосы, то на выходе блока различения сигналов появляется сигнал положительной (нли отрицательной) полярности, который поступает в регулятор направления движения 7, н подвижный объект поворачивается в сторону оси курсовой полосы. Минимальная шнрнна курсовой полосы должна превышать расстояние между смежными сторонами рамок возбуждения настолько, чтобы при смещении ЧЭ относительно оси курсовой линии в съемных рамках индуцировался результирующий сигнал, равный порогу срабатывания схемы различения сигналов. Максимальная шнрнна курсовой полосы не должна превышать суммарную шнрнну двух съемных рамок. В противном случае смещение ЧЭ относительно оси курсовой полосы на величину, превышающую этот параметр, не вызывает появления chiv пала на выходе съемных рамок и устройство не выдает сигнал о смещении ЧЭ относительно курсовой полосы. Максимальная высота ЧЭ над курсовой полосой равна ее ширине. Снижение высоты ЧЭ ведет к повышению точности отслеживания курсовой полосы. Описанный ЧЭ и курсовая полоса совершенно нечувствительны к воздействию внешней среды. Благодаря тому что ЧЭ работает на принципе воздушного трансформатора, надежность его не зависит от пыли, влаги, температуры и диэлектрических предметов между ЧЭ и курсовой полосой. ЧЭ и курсовая полоса не содержат элементов, подтвер-женных старению, и обладают практически неограниченным сроком службы. Использование курсовой полосы в виде параллельных проводов, замкнутых на концах между собой, позволяет программно управлять траекторией движения подвижного объекта. Для этого в местах развег-вления курсовых полос устанавливаются управляемые ключи, замыкающие проводниковые контуры в заданном направлении движения (рис. 4.35). По сравнению с известными описанное устройство обладает более высокой надежностью отслеживания курсовой полосы. Положительный эффект достигается благодаря тому, что курсовую полосу можно защитить диэлектрическим покрытием раской, асфальтом, керамической плиткой), т. е. защитить от механических повреждений. На работу устройства не действуют внешние атмосферные воздействия, диэлектрические предметы, расположенные на курсовой полосе, и мелкие металлические предметы. Расстояние между ЧЭ и курсовой полосой определяется шириной курсовой полосы, максимальное расстояние равно ширине полосы. По сравнению с устройствами, применяемыми в качестве курсового указателя - электромагнитное поле кабеля, по которому протекает электрический ток,- в описанном устройстве используется пассивная 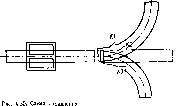 траекторией движения подвижного курсовая полоса, не подключаемая к источнику тока. Поле одиночного проводника на большом удалении имеет малый градиент в горизонтальном направлении, совпадающем с направлением отслеживания, а вертикальная составляющая поля практически равна нулю. Поэтому устройство отслеживания электромагнитного поля курсового кабеля подвержено внешним помехам и отличается низкой помехоустойчивостью отслеживания курса. В описанном устройстве используется двухпроводниковая курсовая линия с высоким градиентом. 4.13. Изм« еской проводимости. магнитной и диэлектрической проницаемости материалов Устройства для измерения электрической проводимости, магнитной и диэлектрической проницаемостей относятся к многопараметрическим датчикам физических величин и используются для контроля токопро-водящих и магнитных материалов по параметрам электрической проводимости и магнитной проницаемости, диэлектрических и полупроводниковых материалов по параметрам проводимости и диэлектрической проницаемости, а также размерных величин изделий из материалов с известными параметрами электрической проводимости, магнитной и диэлектрической проницаемостей. Известно много способов измерения проводимости, магнитной и диэлектрической проницаемостей материалов. Один из них - метод уравновешивания мостовых схем [124] - основан на принципе перебора параметров резисторов, индуктивностей и емкостей. При этом шаг перебора определяется порогами чувствительности AR, AL и ДС по параметрам уравновешивания R, L и С. Максимальное число операций перебора при одном двухпараметрическом измерении = = (4.53) где R„, L„, - максимальные значения параметров сопротивления, индуктивности и емкости. Малые значения AR, AL и ДС достигаются в результате выбора соответствующего времени измерения равного времени преобразования сигнала. Поэтому время двухпараметрического измерения методом уравновешивания (4.54) недопустимо велико для большинства применений. Например, при RJAR = LJAL = CJAC = 10» и = 1 мс время измерения = = 10» с. Несмотря на применяемые методы ускоренного перебора, величина Гн остается большой, что ограничивает использование метода в устройствах автоматического контроля электрических, магнитных и диэлектрических параметров исследуемых материалов. Кроме того, для измерения параметров указанным методом необходимо изготавливать специальные образцы для включения в мостовые схемы. Большим быстродействием обладают методы прямого измерения электрических и магнитных параметров. Индукционный способ пря- [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [ 31 ] [32] [33] [34] [35] 0.0084 |