
|
|
|
Главная страница Периферийные измерительные устройства [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [ 26 ] [27] [28] [29] [30] [31] [32] [33] [34] [35] 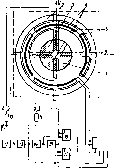  Рис. 4.17. Схема двухкоордннатного датчп! Рис. 4.18. Эквивалентная схе* двухкоордннатного датчика ность получить лучшую линейность преобразования по сравнению с известными устройствами [103]. При изготовлении бло- -ii ка измерения методом фо- 18 рВыиД толитографии выдерживает-"•" ся высокая точность геоме- трических размеров ЧЭ, дифференциального трансформатора и модулирующего элемента, а также достигается хорошая повторяемость характеристик преобразователей за счет использования одного и того же набора фотошаблонов. В преобразователе поле полосковйх проводников ЧЭ и дифференциального трансформатора локализуется в ограниченном объеме пространства, что позволяет уменьшить габариты блока измерения и обеспечивает большую помехоустойчивость. Двухкоординатный полосковый преобразователь перемещений (рис. 4.17) работает следующим образом. Задающий генератор 12 вырабатывает импульсные сигналы прямоугольной формы, которые, пройдя через элемент задержки 13, поступают в базу ключевого транзистора «, а с выхода элемента задержки 15 - ъ базу транзистора 9. Импульсы напряжения преобразуются транзисторами 5 и 5 в импульсы тока возбуждения ЧЭ 4, расположенных соответственно вдоль осей х и у. Амплитуда импульсов тока возбуждения, поступающих с коллекторов транзисторов 8 я 9, определяется соответственно токозадающи-ми резисторами 10, И и выбирается равной для обей» пар ЧЭ 4. Поскольку обе пары ЧЭ конструктивно выполнены одинаково, рассмотрим для определенности работу одной их них, например расположенной вдоль оси X (рис. 4.18). При отсутствии модулирующего элемента 7 параллельно включенные ЧЭ 4 каждой пары и последовательно соединенные с ними первичные обмотки 5 дифференциального трансформатора, образующие два плеча мостовой схемы, имеют одинаковое резистивное сопротивление. Вследствие этого ток возбуждения г, распределяется поровну меявду двумя плечами моста. При нарастании амплитуды тока возбуждения, т. е. иа фронте импульса во вторичной обмотке 6 дифференциального трансформатора переменных магнитных полей каждой из двух встречно включенных первичных обмоток 5 наводятся ЭДС взаимоиндукции ei и е, равные по амплитуде и противоположные по знаку. Синфазная составляющая сигнала, наведенного во вторичной обмотке 6, (4.3! Дифференциальная составляющая сигнала, снимаемая с выходов вторичной обмотки, f/„ = ei-e, = 0. Рассмотрим случай, когда модулирующий элемент 7 расположен над ЧЭ 4 (см. рис. 4.17) таким образом, что его геометрический центр совпадает с геометрическим центром 3 блока измерения, асам модулирующий элемент перекрывает полосковые проводники ЧЭ на половине их длины. Магнитное поле проводников, представляющих собой вместе с проводящим основанием 2 несимметричную полосковуюЦлинию, взаимодействует с проводящим модулирующим элементом. В результате проникновения переменного магнитного поля в проводящую пластину в ней возникают вихревые токи, магнитное поле которых направлено встречно полю полосковых проводников и стремится воспрепятствовать возрастанию его магнитного потока, что эквивалентно увеличению индуктивности полосковой линии. Это ведет к уменьшению на-юдимых во вторичной обмотке 6 ЭДС взаимоиндукции. При наличии модулирующего элемента наводимые ЭДС имеют вид eiM = ei -Ав1, e2M = es -Ае. (4.40) Вследствие симметричного расположения модулирующего элемента 7 относительно чувствительных элементов 4 ке = Авг, и дифференци- альная составляющая сигнала вторичной обмотки при наличии модулирующего элемента Мостовая схема остается сбалансированной. При смещении модулирующего элемента 7 вдоль оси х вследствие встречного включения чувствительных элементов 4 пары индуктивность одного из них увеличивается на величину AL, пропорциональную величине смещения Ах, а индуктивность другого уменьшается на ту же величину AL. Перераспределение реактивных сопротивлений между двумя плечами моста приводит к пропорциональному перераспределению TOijjpB в них, а следовательно, изменению наводимых во вторичной обмотке 6 ЭДС. При смещенном модулирующем элементе наводимые ЭДС eiM(A*) = бы -f Ае, е2ш\х) = - Ае, (4.41) а дифференциальная составляющая сигнала вторичной обмотки 6, пропорциональная величине смещения модулирующего элемента 7, /д.м1Д*) = е,„(Д;ч - е2„(д,) = 2Ав. (4.42) Аналогично при смещении модулирующего элемента влодь оси у работает пара чувствительных элементов 4, возбуждаемых импульсом тока с коллектора транзистора 9 по приходу на его базу импульса напряжения с выхода элемента задержки 15. Сигнал Up,u(Ay), пропорциональный величине смещения Ау по оси у центра модулирующего элемента относительно геометрического центра 3, появляется на выходе обмотки 6 после сигнала /дм(Лх) через интервал времени, равный суммарному времени задержки элементов 14 и 15. При смещении модулирующего элемента 7 вдоль одной из пар ЧЭ 4 (т. е. вдоль одной из осей хну) изменяется только синфазная составляющая выходного сигнала вторичной обмотки 6, наводимого от другой пары ЧЭ, но остается неизменной его дифференциальная составляющая, снимаемая с выходов обмотки 6. Информационный сигнал иа выходе вторичной обмотки остается неизменным и при вращении модулирующего элемента вокруг его центра. Импульсное напряжение амплитудой i/дм с выходов вторичной обмотки 6 поступает на входы блока 18, где преобразуется в цифровой код. 4.7. Особенности развития и проблематика двухкоординатных датчиков Применение диалоговых систем для проектирования и подготовки технологической документации в электронике, машиностроении, строительстве, картографии и других областях народного хозяйства потребовало решения задачи цифрового представления достаточно полной информации об объектах. В подавляющем большинстве случаев исчерпывающее описание объекта задается чертежом, схемой, картой и другими двухмерными изображениями. Однако в таком представлении описание объектов сводится к зaдaию не только координат, а требует многочисленных комментариев к отдельным частям изображения на этапе как ввода, так и преобразования информации [104]. В принципе возможно создание автоматических устройств считывания полной информации с чертежей и ее представление в цифровом виде [105]. Однако такое решение потребовало бы неоправданно больших затрат ресурсов, поскольку в настоящее время не найдены технически простые решения задачи распознавания образов. Поэтому цифровой ввод графических описаний объектов выполняется полуавтоматически. В усфойствах полуавтоматического ввода функции распознавания выполняются человеком, а цифровое преобразование координат точек, выделенных человеком, происходит автоматически [106]. Наиболее просто и естественно такое выделение осуществляется путем ручного совмещения механического указателя в виде курсора, имеющего визирные линии, или щупа с точками, подлежащими кодированию [80]. При этом носитель информации располагается на спе циальном планшете устройства. Важным моментом в процессе кодирования является одновременный ввод сопутствующей информации, требуемой для машинной интерпретации вводимых данных. Сопровож- дающая информация может вводится с помощью клавиатуры или посредством возбуждения щупом специального символьного поля на планшете устройства цифрового кодирования. Развитие микроэлектроники, для которой характерен большой уровень стандартизации, потребовало создания устройств цифрового кодирования графики, ориентированных на дискретную графическую информацию, т. е. с заранее квантованным положением точек на плоскости. Предложено два способа кодирования дискретной информации. Первый предполагает дискретизацию рабочего поля планшета с шагом квантования Ах = Аг/, равным шагу квантования графической информации [106]. Второй способ [80] предусматривает кодирование входной информации с помощью устройства с высоким разрешением (мировой уровень УЦКГ по параметру минимального шага квантования Ах Ф Ф Ау = 25 мкм [107]) по координатам хп у с последующим квантованием с нужным шагом полученных цифровых данных. Последняя операция, как правило, выполняется на ЭВМ. Преимущество устройств первого вида заключается в том, что они позволяют формировать сигнал для оператора в случае недостаточно точного совмещения щупа с дискретными точками чертежа. Стремление реализовать указанный режим в УЦК, способный кодировать также непрерывную информацию с малым шагом квантования, ведет к дискретно-аналоговому принципу [34] их работы. В таких устройствах расстояние между КЭ квантуется аналоговым способом. Отсюда следуют противоречивые требования к КЭ: в дискретном режиме поле КЭ должно быть сильно локализовано для обеспечения шага дискретизации, например. Ах = Ау = 1,25 мм [36], и, кроме того, оно должно быть линейно изменяющимся для выполнения линейной интерполяции выходного сигнала в режиме аналогового измерения. Специфика работы УЦКГ состоит в том, что в качестве носителя информации используются различные диэлектрики: бумага, фотопленка, полимерные пленки. С учетом влияния внешней среды и состояния поверхности перечисленных носителей их диэлектрическая проницаемость изменяется в широких пределах. Поэтому использование емкостных КЭ связано с большими погрешностями [37]. Предпочтение следует отдать индуктивным элементам, магнитный поток которых практически не зависит от свойств диэлектриков. Треб/емую степень локализации поля легко получить, применяя полосковые конструкции. В связи с тем что размер матрицы КЭ стремятся выполнить равным формату чертежа, число КЭ в УЦКГ нередко составляет 2"- 2". Поэтому фактор технологической простоты является решающим при выборе схемы КЭ и метода их опроса. Для упрощения чувствительную часть всех КЭ объединяют и совмещают с механическим указателем, а матрицу образуют лишь пересечения ортогональных шин, служащих для подачи модулируемых сигналов. Многочисленные структурные решения УЦКГ с разложением двухмерного движения на координаты х н у с помощью КЭ непрерывного типа [108, 109] нетехнологичны и имеют низкую воспроизводимость результатов кодирования, а устройства на принципе измерения времени, как правило, акустические, нестабильны в работе вследствие температурных влияний [110]. Повышение точности измерения координат в наиболее совершенных устройствах с разрешением 25 мкм достигается за счет совмещения визирных линий с центром считывающего элемента, выполненного методами микроэлектроники. В известных устройствах микроэлектронным способом удавалось выполнить только емкостной съемник, который, однако, в отличие от индуктивного весьма чувствителен к неод-нородностям носителя информации и воздействиям внешней среды. Поэтому необходимо решить задачу разработки УЦК индуктивного типа со съемником, изготовляемым по технологии фотолитографии. 4.8. Устройство цифрового кодирования дискретной графической информации Дискретные кодировщики графики вьшолняются в виде матрицы ДКЭГ с последовательной во времени модуляцией состояния. Режим последовательного переключения выражается в том, что в каждый момент времени может оказаться переключенным в состояние «1» только один элемент матрицы, выходной сигнал которого используется для установления его номеров /С,, Ку в соответствии с формулами (2.1) и (2.5). Благодаря последовательной работе имеется возможность строить конструктивно простые устройства на 10* ДКЭГ за счет использования только одной цепи считывания и обработки сигналов, а также сканирующего режима возбуждения. , Благодаря применению КЭ с двумя состояниями, различающихся уровнем выходных сигналов, рабочее поле устройства конструктивно разбивается на такие области чувствительности к воздействию модулирующего элемента (щупа), каждая из которых накрывает только одну точку кодируемого изображения, расположенную в узле координатной сетки. Поскольку зоны чувствительности не перекрываются, то появляется возможность выдавать сигналы оператору о нарушении допустимой точности совмещения щупа с кодируемой точкой и, таким образом, обеспечить низкую вероятность ошибок. Режим дискретного кодирования можно организовать с помощью устройства кодирования непрерывной информации с дополнительной программной обработкой результатов точного измерения координат. На этом основании некоторые разработчики ставят под сомнение необходимость аппарат юй реализации режима дискретного кодирования [80]. На наш взгляд, целесообразность аппаратной реализации дискретного режима обусловлена эргономическими преимуществами способа съема координат с помощью щупа по сравнению с курсором, применение которого для точного кодирования является необходимым. Эргономические соображения становятся определяющими в связи с тем, что подавляющее большинство графических задач (около 75 %, по данным [111]) относится к проектированию микроэлектроники, где превалирует дискретное кодирование. В режиме работь( со щупом оператор в состоянии кодировать до 6 • 10 точек в час. Значительно меньшая производительность присуща режиму работы с курсором. поскольку операция совмещения курсора с кодируемой точкой требует больше времени, чем совмещение щупа. Кроме того, поточечное кодирование курсором требует дополнительной операции нажатия кнопки на курсоре, что излишне при работе со щупом. Поэтому для повышения производительности в разработках УЦКГ [37] режим дискретного кодирования реализуется аппаратно. Решающее влияние на технические характеристики устройств оказывает выбор пары: рабочее поле - съемник. Принципы построения устройств допускают, однако, множественность решений для конструкции рабочего поля и съемника. Этим принципам не противоречит также широко распространенная [81] петлевая конструкция координатных шин при условии, что они выполнены в виде двухпроводных несимметричных линий (см. рис. 2.1). Благодаря включению в состав рабочего поля проводящей поверхности выполняется принцип конструирования КЭ с распределенными параметрами. Реализация этого принципа сразу устраняет ряд недостатков, присущих существующим устройствам. Устраняется краевой эффект, который выражается в изменении амплитуды считываемых сигналов на краях рабочего поля. Этот эффект обусловлен паразитными токами, индуцированными возбужденной шиной в ближайших к ней шинах. Локализующее действие проводящей поверхности приводит к устранению взаимовлияния между координатными шинами и полному исключению краевого эффекта. Эффективность проводящей поверхности еще выше в конструкции рабочего поля в виде одиночных шин (см. рис. 2.4). Второй существенный эффект состоит в повышении помехоустойчивости съема сигналов в условиях внешних помех. По результатам исследования помехоустойчивости линий полосковой конструкции уровень внешних помех уменьшается в десятки раз. Определенное положительное влияние оказывает также расширение полосы пропускания канала прохождения модулируемых сигналов на его быстродействие, оцениваемое частотой возбуждения ДКЭГ. Результаты экспериментального исследования петлевого ДКЭГ, приведенные в параграфе 2.2, явились основанием для перехода к вертикальным ДКЭГ в виде одиночных несимметричных координатных линий (см. рис. 2.3) и к считыванию горизонтальной составляющей поля рассеивания {351. Исследования структуры поля таких линий, изложенные в гл. 2, показалибольшие возможности его локализации в рамках обычных конструктивных ограничений, характерных для печатного монтажа. Однако уже нз простых соображений следовало, что съем горизонтальной составляющей поля приводит к изменению амплитуд считанных сигналов съемного витка по гармоническому закону. Угловые положения щупа с нулевым выходным сигналом можно устранить стандартным приемом - введением дополнительного ортогонального витка. Однако постоянство амплитуд от угла можно получить только при обработке амплитудных значений сигналов ортогональных витков по формуле (2.1). Одним из важных аргументов в пользу способа съема горизонтальной составляющей магнитного поля несимметричных полосковых линий с помощью двух ортогональных рамок явилась разработка простой и компактной схемы обработки сигналов [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [ 26 ] [27] [28] [29] [30] [31] [32] [33] [34] [35] 0.0109 |