
|
|
|
Главная страница Периферийные измерительные устройства [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [ 27 ] [28] [29] [30] [31] [32] [33] [34] [35] 1>- Рис. 4 19. Схема обработи (рис. 4.19), которая свободно располагается в корпусе щупа. Считанные сигналы ортогональными рамками Lj и L, усиливаются дифференциальными усилителями и до уровня 0,4-0,5 В, на котором эффективно можно воспользоваться нелинейностью вольт-амперных характеристик транзисторов для квадратичного детектирования. Квадратичный детектор выполнен на транзисторах Т1 - Т4. Вольт-амперная характеристика биполярных транзисторов не является квадратичной [251. Однако эффект возведения в квадрат легко получить путем включения лннеализирующего сопротивления и выбора рабочей точки транзисторов с помощью делителя напряжения на резисторах R2, R3. Благодаря тому что транзисторы представляют собой генераторы тока, легко получить эффект суммирования выходных сигналов на общем сопротивлении нагрузки R4. Схема выполняет аналоговое преобразование е=е? + е+е + 4, (4.43) где Ci = F„ sin а; = -Е„ sin а; = Е„, cos а; = -Е cos а; максимальное значение амплитуды сигнала. Подставляя значение в формулу (4.43), получаем е = 2Е1 sin* а -- 2Е1 cos а = 2Е1. (4.44) Выходной сигнал посредством схемы на транзисторах Т5 и Т6 передается по кабелю на вход схемы различения сигналов по уровню в виде импульсного компаратора. Обработка считанных сигналов по выражению (4.44) дает возможность исключить влияние углового положена ния съемника относительно координатных линий. Влияние изменения оси наклона съемника относительно рабочего поля устраняется путем ограничения высоты рамок с помощью экрана в виде конуса на конце щупа. Благодаря такому ограничению величины рамок их потбко-сцепление остается практически постоянным при наклоне оси щупа на 45° относительно плоскости рабочего поля. Указанный принцип съема сигналов реализован в устройстве кодирования дискретной графической информации «Графокод» (рис. 4.20) [361. Ниже приведены особенности посгроения действующего устройства, в котором воплощены ранее принятые общие принт п.i построения устройств цифрового кодирования. Функциональная схема (см. рнс. 4.20) является типичной для подобных устройств. Однако ряд существенных отличий имеют входящие в нее блоки. Рабочее поле устройства выполнено в виде трехслойной печатной платы размером 320 X 320 мм. Первый слой представляет собой сплош-
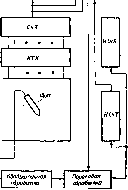 Рис 4.20. Функциональная схема устройсгва сГрафокод» ную проводящую поверхность, образованную слоем фолын толщиной 35 мкм. Проводники X шириной 0,4 мм расположены с шагом 1,25 мм и отделены от проводящей поверхности диэлектриком 0,5 мм. Они получены травлением второго слоя двухстороннего фольгированного стеклотекстолита. Проводники Y аналогичной конфигурации получены путем травления тонкого фольгированного диэлектрика ФДМ-0,1 и наклеены над проводниками X. Системы проводников X иУ оказываются разделенными диэлектриком толщиной 70 мкм. Проводники У защищены от внешних воздействий диэлектриком толщиной 20 мкм. Входы проводников X к У подключены к соответствующим коммутаторам тока. По амплитуде импульсы тока возбуждения не превосходят 45 мА и имеют фронт около 10 не. Частота работы коммутатора импульсов тока длительностью 100 не составляет 5 МГц. Счетчики X н У, управляющие работой двух коммутаторов тока на 256 выходов каждый, работают поочередно, поэтому шины X, а затем У выбираются последовательно. Если щуп установлен на рабочем поле в окрестности шины не далее чем 0,4 мм от ее оси, то считанный сигнал превысит пороговый уровень на импульсном компараторе и его выходной триггер установится в «1». Однако полезный сигнал не может непосредственно использоваться для считывания кода со счетчика выбора шины на выходной регистр по причине тремора руки оператора в момент совмещения щупа с кодируемой точкой. Компаратор воспринимает тремор в виде чередующихся серий единиц и нулей с возрастающим во времени числом «1». Процесс совмещения щупа с кодируемой точкой можно считать заЛршенным, если серия «1» является непрерывной на заданном интервале времени, например 0,25 с. Аппаратно антитреморный режим кодирования реализуется с помощью счетчика накопления «1», который сбрасывается в нуль любым импульсом «О», поступающим с выхода импульсного компаратора. Съем координаты производится в том случае, если накопительный счетчик полностью заполняется считанными «1». Обычно вместо накопительного счетчика для устранения тремора применяют кнопку, вмонтированную в щуп, которую приходится нажимать при кодировании каждой точки. Помимо эргономических неудобств и низкой скорости кодирования такое решение не позволяет реализовать режимы отслеживания и рисования щупом. Для режима поточечного кодирования характерно наличие срабатывания двух накопительных счетчиков от сигналов, индуцированных шинами X и Г. По сигналам срабатывания накопительных счетчиков (НСч) ХкУ производится передача состояния счетчиков X и У во внешние регистры и вырабатывается сигнал выдачи кода (ВК) Срабатывание НСч приводит также к появлению звукового сигнала, который указывает оператору, что кодирование точки произошло и щуп можно перемещать на следующую точку. В момент перехода от точки к точке появля-кэтся сигналы считывания «О», которые и устанавливают НСч в нуль. Режим отслеживания линий и рисования отличается от режима поточечного кодирования тем, что оператор в процессе кодирования может располагать щуп между зонами чувствительности, совпадающими с узлами координатной сетки рабочего поля. В этом режиме коэф- фициент пересчета НСч устанавливается таким, чтобы обеспечить их заполнение в течение нескольких миллисекунд. Сигнал выдачи кода вырабатывается при полном заполнении только одного из НСч, а изменение содержимого выходных регистров происходит только в одном }13 них. Таким образом, при пересечении курсором координатной шины устройство выдает координату х и прежнее значение координаты t/ (или координату у и прежнее значение координаты х). Многократная выдача одной и той же координаты не происходит, если отсутствует установка НСч в «О», что имеет место только в том случае, когда щуп оказывается за пределами зоны чувствительности. Максимальная частота выдачи координат устройства «Графокод» составляет 2 кГц, что практически не накладывает никаких ограничений на скорость отслеживания или рисования. В процессе эксплуатации устройства в режиме рисования было обнаружено быстрое стирание наконечника щупа. В этом отношении такие материалы, как керамика и ситалл, мало подходят по механическим свойствам. Наиболее подходящим материалом для изготовления наконечника щупа оказался по-ликор, который имеет достаточную твердость и легко обрабатывается алмазным инструментом. В режимах поточечного кодирования и отслеживания устройство настраивается на шаг квантования по координатам jc и у 1,25 мм или 2,5 мм. Настройка производится изменением коэффициента пересчета счетчиков, управляющих работой коммутаторов тока. Одновременно с переключением шага дискретизации изменяется ширина зон чувствительности, что достигается подачей на вход импульсного компаратора различных пороговых уровней напряжения. Два уровня дискретизации соответствуют двум наиболее распространенным задачам, решаемым с помощью устройства; задаче проектирования печатного монтажа и задаче корректировки фотошаблонов печатных плат. Шаг 1,25 мм является нормализованным для установки компонентов и сверления отверстий, поэтому информация на фотошаблонах изменяется с таким же шагом, Эскнзирование печатного монтажа ведется в масштабе 2: 1, что требует кодирования установочных мест деталей и переходных точек проводников с шагом 2,5 мм. Оценим, в какой мере эксплуатационные параметры устройства соответствуют концепции" микро-АРМ. Требование доступности АРМ для каждого конструктора можно удовлетворить, если затраты ресурсов на его создание окупятся в течение нескольких лет за счет повышения производительности труда конструктора. Для уменьшения срока окупаемости стоимость оборудования рабочего места не должна в несколько раз превышать годовую выработку конструктора. Поэтому стоимость каждого из устройств АРМ не должна превышать 2-3 тыс. руб. Указанная стоимость устройства «Графокод» достигается за счет использования обычной технологии фотохимической печати для получения рабочего поля и вследствие управления координатными шинами посредством выходных сигналов маломощных микросхем. Одними нз необходимых эргономических требований к устройствам микро-АРМ являются малые габариты и потребляемая мощность. Первое из них позволяет разместить АРМ на рабочем месте конструктора. Рис. 4.21. Устройство цифрового кодирования графической инфорг а второе - обходиться без специальных систем охлаясдения. Указанные требования также в значительной мере влинют на затраты ресурсов и величину капитальных вложений. Устройство «Графокод» имеет габариты 600 X 500 X 40 мм и выполнено в настольной конструкции (рис. 4.21). Потребляемая мощность от сети переменного тока составляет 35 ВА. Столь низкое потребление получено за счет использования для питания устройства только напряжения +5 В и разработки бестрансформаторного источника стабилизированного напряжения с КПД 70 % [1121. При массе усузойства 6,5 кг в процессе разработки решена задача обеспечения надежной работы транзисторов инвертора без применения делителей напряжения питания, а также предложена схема управления инвертором, использующая только микросхемы ТТЛ. Указанные выше технические решения дали возможность также уменьшить массу устройства до 6,5 кг. Достигнутые результаты по упрощению и уменьшению габаритов позволяют прогнозировать, что область применения устройств цифрового кодирования дискретной графической информации в ближайшее время будет расширена за счет их использования в навигационном оборудовании, радиолокации, гидроакустике. 4.9. Устройство цифрового кодирования непрерывной графической информации В отличие от УЦК дискретной графической информации, выходной код которых соответствует номеру КЭ в матрице, образованной пересечениями шин X и К, в УЦК непрерывной графической информации (НГИ) выходной код соответствует каждому элементу квантования рабочего поля площадью ДхАу, число которых может значительно превосходить число КЭ. В рассматриваемом ниже устройстве КЭ на пересечении координатных шин используются в качестве шкалы ГО, а ВМХ соседних НКЭГ служат для квантования расстояния между координатными шинами с требуемым шагом Дх, Ау. Применение метода шкал является основой их совершенствования. Наиболее характерный технический параметр таких устройств - разрешающая способность Ах, Ау или же шаг квантования по коорди- натам X, у, который для подавляющего большинства иностранных моделей кодировщиков равен 0,025 мм и даже 0,01 мм [1131. Систематическая абсолютная ошибка измерения координат с помощью рабочего поля обычно на порядок больше [37]. Разрешающая способность определяет повторяемость кодирования одной и той же точки и равна аппаратной ошибке. Высокая точность устройства требует снижения величины ошибок, вносимых оператором. Поэтому щуп является слишком грубым инструментом для указания на кодируемые точки. Коди-р.емые точки обычно выбираются с помощью курсора, который имеет визирные линии, служащие для совмещения с точками изображения. В связи с большим разнообразием задач, решаемых с помощью непрерывных кодировщиков, основным функциональным требованием для них является универсальность в отношении режимов работы: поточечное кодирование, отслеживание кривых (рисование) с помощью курсора и щупа. Условие совместимости режимов работы может выполняться методом обработки результатов точных измерений, полученных только с помощью курсора Помимо невысокой скорости кодирования такое решение ведет к большим аппаратурным затратам, если задача дискретизации реализуется встроенными в устройство аппаратурными средствами, или к чрезмерной загрузке внешней ЭВМ в случае программной реализации. В известных разработках кодировщиков с совмещением функций приоритет отдавался задаче непрерывного кодирования. Поэтому эргономические возможности ввода дискретной информации реализовались неполностью. Нами выполнено требование полной совместимости функциональных и эргономических возможностей в одном устройстве для режимов кодирования дискретной и непрерывной графической информации. Выполнение этого требования прежде всего влияет на выбор структуры рабочего поля. Принципиально новым решением явилось использование несимметричных полосковых линий в качестве координатных шин Наряду с обеспечением максимальных эргономических возможностей для режима дискретного кодирования и помехоустойчивости получена практически линейная ВМХ КЭ с круговым съемным витком. Как было показано в параграфе 2.2, требуемая степень линейности ВМХ достигается выбором диаметра съемного витка. Экспериментальная зависимость амплитуды считанных сигналов от смещения центра кругового витка вдоль осих, перпендикулярной к шине возбуждения X, совпадающей с осью ординат, показана на рис. 4.22, а. Максимум амплитуды сигнала иа ВМХ наблюдается при X = I Экспериментально установлено, что при х = г/2 ВМХ отклоняется от прямой линии на единицы процентов. Найдем зависимость амплитудных значений считанных сигналов от положения центра съемника между парой координатных шин Хо, Al для моментов времени, когда поочередно возбуждаются линии слева направо, начиная с линий, расположенных за пределами курсора. В момент времени/, импульсы тока поступают влиниюХ з, но поскольку ее взаимная индуктивность со сьемным витком курсора близка к нулю, то амплитуда счи1анных сигналов пренебрежимо мала независимо от положения центра съемника на интервале Хо, Xi. Возбуждение [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [ 27 ] [28] [29] [30] [31] [32] [33] [34] [35] 0.0109 |
||||||||||||||||||||||||||||||||||