
|
|
|
Главная страница Периферийные измерительные устройства [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [ 30 ] [31] [32] [33] [34] [35] лубины проникновения индуцированных токов на фронте излучаемого магнитного поля; контроль неоднородностей проводящих поверхностей с диэлектрическим равномерным покрытием, что упрощает также позиционирование микроскопа относительно исследуемой поверхности. Технико-экономические характеристики индукционного микроскопа позволяют определить преимущественные области его применения. К ним относятся диагностика и контроль материалов и изделий. В области диагностики становится практически разрешаемой задача контроля в рабочем режиме поверхностей сильно нагруженных трущихся поверхностей, например валов в подшипниках скольжения. В области контроля индукционный микроскоп целесообразно использовать для обнаружения поверхностных дефектов лопаток турбин, размерного контроля проводящих элементов печатных плат, бесконтактного измерения и сортировки шариков для подшипников. 4.11. Устройство совмещения Операция совмещения выполняется над двумя подвижными объектами, расположенными в параллельных плоскостях. Различают совмещение объектов в одной и двух точках. Совмещение в одной точке обеспечи-ваег одинаковое взаимное расположен! двух объектов, если их взаимное перемещение имеет одну степень свободы. Этот случай наиболее широко распространен в технике, так как он лежит в основе измерений длины объектов компараторным методом. Процесс измерения состоит в сравнении объекта измерения со шкалой. Он неизбежно включает операцию совмещения шкалы с началом и концом объекта. Для повышения точности измерения длины, например эталонной линейки, ее начало и конец помечают метками, которые позволяли бы устанавливать по отношению к ним линию считывания с минимальной погрешностью. Наибольшую повторяемость по совмещению имеют фотоэлектрические микроскопы. Достигнутая минимальная ошибка совмещения со штриховой меткой в режиме сканирования составляет 0,02 мкм IП7]. В технике производственных измерений широко распространен щуповой метод, реализуемый в трехкоординатных измерительных машинах. Поскольку начало и конец измеряемого объекта нельзя пометить меткой, выполняющей роль модулятора для считывающего элемента, то начало измеряемой длины фиксируется по усилию, оказываемому объектом на щуп при контактировании. Значение этого усилия фиксируется по совмещению метки, связанной со щупом относительно считывающего элемента. Этим методом достигнута повторяемость измерений не хуже 1 мкм [118]. Элементы фиксации совмещения при одномерном движении модулятора по отношению к считывающему элементу составляют основу устройств дискретного позиционирования в микроэлектронике - фоюштампы, фотоповторители, электронно-лучевые установки [119]. В вычислительной технике увеличение плотности расположения информационных дорожек на магнитном и оптическом дисках связано с решением задачи повышения точности дискретного позиционирования 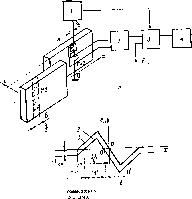 Рис. 4.29. Устройство магнитных головок [120] и фиксации начала записи. В технике измерения прямолинейного и углового механического движения до сих пор наиболее широко применяются устройства счета эталонных величин, равных или кратных шагу квантования. К таким устройствам относятся интерферометры, фотоэлектрические преобразователи со штриховыми линейками, индуктосины. Для автоматической установки начала отсчета все они нуждаются в дополнительных элементах совмещения в одной точке. Устройство совмещения в одной точке строится на основе одного КЭ (рис. 4.29). На неподвижном объекте А размещается считывающий элемент, шина возбуждения которого соединена с формирователем тока /, а съемная шина - с усилителем 2. Усилитель 2 через пороговый элемент 5 соединен с регистрирующим блоком 4. Подвижный объект Б перемещается относительно объекта А с зазором С. Он содержит модулирующий элемент в виде проводящей полоски шириной Я/2. Зависимость амплитуды выходных сигналов от перемещения оси z модулирующего элемента вдоль оси х иллюстрирует ВМХ / на рис. 4.29, б. Пока ось 2 находится на интервале оси х - оо ч---\К амплитуда  Рис. 4.30. Завис ной скорости nepeMeutet решающей способности ВЫХОДНОГО сигнала равна нулю и импульсный компаратор 3 срабатывает от случайных помех. Во избежание случайных переключений на один из входов компаратора подают напряжение £с„. Приведенная ко входу ВМХ для этого случая на рис. 4 29, б изображена кривой 2. Там же показаны положения модулирующего элемента, которые соотвегствуют состояниям «/» и «Л импульсного фильтра 4. Зона чувствительности КЭ примерно рав- на 1,5 X, т. е. 3 мм при А, = 2 мм, что позволяет своевременно принять решение об изменении скорости двилсения, если КЭ служит для совмещения в точке О объектов А и Б. Положение линии г вблизи точки О можно фиксировать не только по изменению уровня напряжения иа выходе импульсного фильтра, но и по частоте его переключения из одного состояния в другое, используя переключательную характеристику (см. рис. 3.18). Частота переключения максимальна в точке О Фиксировать частоту переключения легко с помощью счетчика переключения на заданном интервале работы генератора тока возбуждений. При этом легко изменять как интервал наблюдения, так и количество переключений на выбранном интервале. Если число переключений в «1» выбрать более 1 в течение Z, переключений импульсного фильтра, то интервал перемещения вблизи точки О, на котором имеет место это событие, равен точности совмещения Ал; с вероятностью ошибки 1/. На рис. 3.19 приведены результаты исследований точности совмещения КЭ с параметрами X = 2 мм. Ал: = 0,1 мм, полученные с помощью экспериментальной установки. По оси абсцисс отложено количество разрядов импульсного фильтра, а по оси ординат - погрешности совмещения. На рис. 4.30 показана критическая скорость перемещения Vp, при которой динамическая ошибка не превышает 2AJc Приведенные экспериментальные данные дают достаточно полное представление о точностных и скоростных свойствах устройства совмещения Оно позволяет фиксировать момент совпадения объектов Л и Б с точностью 15 мкм, перемещающихся g относительной скоростью 37,5 м/с, а при максимальной точности совмещения 0,12 мкм скорость не должна превышать 73 мкм/с. В технически распространенном случае, когда динамическая погрешность совмещения не должна превосходить 1 мкм, допустимая скорость движения составляет 40 мм/с. Приемлемый путь снижения погрешности без уменьшения скорости заключается в повышении крутизны преобразования за счет параллельного включения базовых КЭ при постоянной чувствительности схемы различения сигналов. На рис. 4.31 иллюстрируется метод повышения крутизны путем параллельного включения базовых КЭ. Схема позволяет практически получать изменение амплитуды выходного сиг- 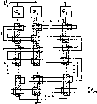 нала несколько вольт на миллиметр н чувствительность в области единиц ангстрем. Формирователи тока выдают одновременно в каждую из пшн возбуждения импульсы амплитудой до 1 А при времени нарастания 6 не. Идентичность параметров импульсов тока достигается с помощью транзисторов в режиме с общим коллектором и общей базой. Параллельное включение токов возбуждения позволило использовать низковольтный источ- г- ник питания и планарную конфигура- -л [ цию т последовательно соединенных - съемных шин, проходящих над проводящей поверхностью на расстоянии р„ 31 параллельное включе-1,0 мм и отделенных от шин возбуж- „„е КЭ дения диэлектриком 0,15 мм. В качестве модулятора используется печатная плата в виде проводящих полосок, расположенных с шагом шин возбуждения. Плата модулирующих полосок жестко связана с подвижным объектом и перемещается относительно считывающих элементов с зазором 0,1 мм. Практически испытывалась матрица (4 х 4) КЭ. Минимальная амплитуда сигнала при перемещении на 0,5 мм от положения нулевых сигналов составляла 0,6 В, т. е. получена крутизна преобразования 5 = 1,2 мВ/мкм а Ах = 0,45 нм. Рассмотренным методом удается легко получить увеличение чувствительности на два порядка, поскольку не существует технических ограничений на увеличение числа параллельно включенных КЭ, например до 1024. Высокая точность coi хенпя, практически полученная при исследовании единичных КЭ, и исключительная простота их технической реализации позволили аргументированно сформулировать и решить задачу создания установки совмещения кремниевой пластины. Актуальность такой задачи обусловлена тем, что в настоящее время точ-• ностные возможности ручного совмещения с помощью двухпольного оптического микроскопа практически исчерпаны. Полученная точность 0,25 мкм [1211 не позволяет получать ширину проводников микросхем существенно меньше 1 мкм Кроме того, ручное визуальное совмещение не исключает значительных субъективных ошибок, что является основной причиной брака. Установкам фотоэлектрического совмещения помимо исключительной конструктивной сложности присущи следующие ограничения} малое поле зрения, требующее ручного предварительного позиционирования, необходимость механического сканирования луча, требование прозрачности для материала фотошаблона На устранение указанных ограничений и была направлена разработка описанной ниже установки. Одной из наиболее трудноразрешимых технических задач в проблеме совмещаемости рисунков на пластине является получение стабиль- 13 1-243 1 93 ных по отношению к технологическим операциям (в частности, диффузии при 1200°) меток, обладающих достаточным «информационным контрастом». Эта задача практически неразрешима при считывании меток оптическими методами. Применение микрополосковых КЭ требует создания меток в виде проводящих полосок сравнительно больших размеров 3 х 1 х 0,02 мм, которые для термоустойчивости выполняются, например, из никеля, их механическое крепление достигается, благодаря помещению в углубления, вытравленные в кремнии, которые затем закрываются поликристаллическим кремнием. В таком виде метка нечувствительна к внешним воздействиям. Существукщие установки совмещения работают на принципе считывания одним чувствительным элементом двух меток, одна из которых расположена на фотошаблоне, а другая - на пластине. ЧЭ настраивается на регистрацию заданного взаимного положения меток. Так как на фотошаблонах располагается по две метки, положение которых выдержано с большой точностью относительно изображения на фотошаблонах, то при совмещении двух меток на фотошаблонах с двумя метками на пластине получаем совмещение изображений фотошаблонов по пластине. Поскольку считывание меток с фотошаблонов и пластины выполняется одним и тем же ЧЭ, то расстояние между метками на пластине должно быть равно расстоянию между метками на фотошаблонах. Принцип работы устройства совмеМ1ения существенно отличается. Метки на фотошаблонах и пластине считываются различными ЧЭ. Совмещение достигается, благодаря фиксированному размещению считывающих элементов фотошаблона и пластины, например путем их з,акреплеиия на станине установки. Так как метки на фотошаблонах и пластине с высокой точностью позиционируются относительно ЧЭ, то имеет место совмещение изображений фотошаблонов иа пластине при условии, что метки фотошаблонов занимают фиксированное положение относительно изображений. На рис. 4.32 показана функциональная схема устройства позиционирования кремниевой пластины 4 относительно ЧЭ 1-3, которые расположены на неподвижном основании устройства. Пластина механически может перемещаться в направлениях х, у а углу ф. Предположим, что в результате предварительной установки пластины она занимает положение, показанное на рис. 4.32, т. е. моделирующие элементы 1-3 находятся за пределами соответствующих считывающих эле-, ментов. Механизмом перемещения по оси х пластина смещается таким образом, что метки 1 ч 2 попадают в зону чувствительности шириной чувствительных элементов. Если чувствительные элементы находятся в режиме последовательного возбуждения коммутатором тока 5, запускаемого блоком управления 10, то попадание метки в зону чувствительности вызовет изменение полярности считанных сигналов в соответствии с ВМХ, показанной на рис. 4.29, б. Этот момент будет зафиксирован переключением импульсного фильтра 8 из «О» в «7», включенного последовательно с усилителем 6 и импульсным компаратором 7. Дальнейшее перемещение в направлении х вызовет переключение элемента / или 2, расположенного параллельно оси у, в нулевое 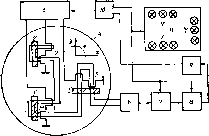 состояние. Момент совмещения осей модулирующего и считывающего элементов фиксируется по частоте изменения состояний, когда ось модулирующего элемента занимает положение о. Единичное состояние импульсного фильтра отображается левой лампочкой в группе х, которая ртносится на мнемосхеме и к кэ1, а срабатывание счетчика измерения частоты фиксируется включением средней лампочки. В момент совмещения элемента 1 ось метки 2 может оказаться как слева, так и справа от линии считывания элемента 2, что отражается на его индикаторе левой или правой лампочкой в группе ф. Срабатывание счетчика частоты от элемента 2 добивается угловым вращением ф пластины 4 вокруг центра м первого кодирующего элемента. В силу симметрии КЭ вращение модулирующего элемента вокруг центра считывающего элемента не приводит к нарушению совмещения, поскольку метка остается симметричной относительно линии возбуждения и встречно включенных частей съемной линии. Совмещение метки 5 с ЧЭ достигается перемещением пластины по направлению оси у. Цикл совмещения повторяется, если последующие перемещения пластины вызывают нарушение совмещения на предыдущих этапах. Обычно при ручном режиме не требуется больше двух-трех повторных совмещений. Действующий образец установки совмещения собран на базе измерительного микроскопа ММИ-2. Контроль совмещения наблюдался с помощью микроскопа МБС-2. Так как точность совмещения КЭ значительно выше разрешения оптического микроскопа, то контроль с помощью МБС-2 сказался лишь качественным. Работа иа установке подтвердила эргономические преимущества совмещения по сигналам сьето- 13* 195 [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [ 30 ] [31] [32] [33] [34] [35] 0.0088 |