
|
|
|
Главная страница Периферийные измерительные устройства [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [ 25 ] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] (4.29) согласно правилу де Моргана [98] d = (ab) (abc) {аъс). (4.30) Схема, реализующая функцию (4.30), показана на рис. 4.14. Число корпусов микросхем для ее реализации т2ЛА = 4; тзлн = 3; " + . Таким образом, согласование отсчетов методом двойной линии считывания допускает значительное расхождение показаний отсчетов, равное половине шага дискретизации грубого отсчета, а поразрядная корректировка показаний грубого отсчета позволяет выполнить позиционную кодовую шкалу в двоичном коде, что сокращает затраты оборудования и улучшает схему согласования отсчетов. 4.5.1 вой датчик коорди» Цифровое измерение угловых и линейных перемещений подвижных объектов в составе различных систем автоматического управления - одна из актуальных задач, которые решаются с помощью цифровых датчиков координат положений и перемещений. Особенно актуальна такая задача в энергетических установках, где необходимо контролировать деформации и вибрации объектов. Контроль в таких установках должны выполнять датчики координат микроперемещенин в диапазоне 1-2 мм с разрешающей способностью иточностью до 0.1 мкм, функционирующие в широком температурном диапазоне, в активных средах с высокой пыле- и влагонасыщенностью. Применение в таких условиях известных в настоящее время датчиков ограничено следующим. Для оптических датчиков необходимы идеальные условия по освещенности, пьезоэлектрические датчики непригодны для измерения низкочастотных вибраций и тем более статических деформаций, индуктивные датчики неработоспособны в изменяющемся магнитном поле, полупроводниковые датчики - в средах с повышенным уровнем радиации. В этих условиях можно использовать цифровой датчик координат на микрополосковых элементах [99]. В нем в качестве ЧЭ используется система несимметричных полосковых печатных проводников опре- ГТ 1-[ ! деленной конфигурации, значение 1 Г индуктивности L которых управ- Рис. 4.14. Оптимальная схема согласо- ляется модулятором в виде токования отсчетов проводящей пластины или полоски.  Плоскость модулятора параллельна плоскости ЧЭ, расстояние между плоскостями может достигать 0,5 мм. Чувствительный элемент опрашивается импульсами тока высокой частоты (1-3 МГц). При этом измеряется падение напряжения из индуктивности образующих его проводников. Так как индуктивность зависит от положения модулятора над проводниками ЧЭ, то напряжение на индуктивности и соответственно его цифровой эквивалент однозначно определяют относительное положение модулятора с подвижными деталями, относительно ЧЭ, соединенного с неподвижной частью установки. Возбуждение чувствительных элементов высокочастотными импульсами тока позволяет выносить ЧЭ на значительные расстояния от блока возбуждения и обработки информационных сигналов, используя для этого экранированные кабели. Кроме того, импульсы возбуждения и считанные сигналы можно передать через импульсные трансформаторы, что позволяет полностью изолировать ЧЭ от активных элементов схем управления и источников питания. Это является выполнением еще одного условия использования датчиков в энергетических установках и активных средах. Принцип работы датчика поясняется его функциональной схемой (рис. 4.15), на которой раскрыт блок измерения в виде двух симметричных ЧЭ, расположенных в одной неподвижной плоскости, и подвижного модулятора [100]. Генератор импульсов создает периодические импульсные сигналы напряжения прямоугольной флрмы, предназначенные для возбуждения ЧЭ и обеспечения функционирования схемы обработки считанных сигналов Импульсы напряжения поступают на вход КТ, где преобразуются в импульсы тока и поочередно подаются в первый и второй ЧЭ блока измере11Ия. Напряжение на индуктивностях проводнаков ЧЭ усиливается и преобразуется в цифровой эквивалент блокснй обработки (БО). Этот цифровой код и определяет положение модулятора относительно ЧЭ. Остановимся более детально на описании блока измерения. В момент нарастания фронта импульса тока возбуждения напряжение на индуктивностях полосковых проводников, образующих ЧЭ, составляет (4.31) где Lo - погонная индуктивность полосковых проводников; / - длина проводника с одной стороны от оси симметрии ЧЭ. Индуктивности проводников с разных сторон от оси симметрии ЧЭ равны, поэтому равны и падения напряжения на них при подаче импульсов тока (ui - и2). Поскольку над ЧЭ расположен токопрово-дящий модулятор, то в момент нарастания фронта импульса тока возбуждения в результате проникновения магнитного поля тока в металл модулятора в нем возникают вихревые токи, поле которых направлено встречно магнитному полю тока в полосковых проводниках В результате вычитания полей индуктивность полосковых проводников уменьшается пропорционально коэффициенту модуляции б = /-т/-о. где L„ - погонная индуктивность полосковых проводников ЧЭ при наличии модулятора над ним. Модулятор перекрывает ЧЭ на длине ь, 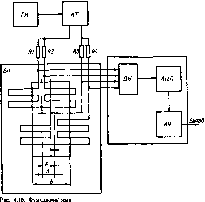 схема цифр<йюго датчика коордннг равной половине длины ЧЭ, которая задается длиной параллельных последовательно соединенных участков полосковых проводников. С учетом действия модулятора индуктивность проводника половины ЧЭ (с одной стороны от оси симметрии) составит W = Lo + ) « + (4 - 4.32) где X - смещение оси модулятора от оси ЧЭ. Индуктивность второй половины ЧЭ соответственно записывается так: (4.33) 1Лх)-= и[--х)п + Ы,[\ + х\п. Падения напряжения на индуктивностях полосковых проводников с одной и другой сторон от оси симметрии ЧЭ соответственно будут иЛх) = 4- [±-{1 + д)+ х{1- б)] , (4.34) £/, (;с) = А (1 + б) - X (1 - б)] . (4.35) Рис. 4.16. ВМХ блока i Импульсные сигналы, равные падению напряжения на индуктивностях проводников ЧЭ, поступают на парафазные входы дифференциального усилителя (ДУ), в котором разность напряжений усиливается и, поступая в АЦП, преобразуется в цифровой код: -=-!f-KyLoxn{l-&). (4.36) Для исключения влияния неинформационных параметров на точность измерения (к ним относится нестабильность высоты модулятора над ЧЭ, тока /, и длительности фронта т? импульсов возбуждения, коэффициента усиления Ку усилителя) блок измерения содержит два одинаковых ЧЭ. При этом напряжение на выходе второго ЧЭ составит (X) = А KyLo (А - д:) л (1 + б), (4.37) где А - расстояние между чувствительными элементами (между осями их симметрии). Это напряжение поступает на вход АЦП, в котором оно также преобразуется в цифровой код. Коды сигналов с первого и второго ЧЭ обрабатываются в арифметическом устройстве (АУ) по формуле Д • gl (X) «1 W -I- е, (х) (4.38) Анализ формулы (4.38) показывает, что на конечный результат не влияют дестабилизирующие факторы: изменение высоты модулятора над ЧЭ, влияющие па величину б; параметры импульсов тока возбуждения /, и т; изменение коэффициента усиления дифференциального усилителя (/Су). При этом в одинаковой пропорции изменяются величины ei (х) и (х), а конечный результат остается без изменений. Для доказательства достоверности определения х рассмотрим ВМХ первого и второго ЧЭ при смещении относительно их модулятора на участке А (рис. 4.16). Согласно выражениям (4.36) и (4.37) характеристики (х) и (х) линейны: при Х = 0 ех(0) = 0, е,(0) = A£.,д„(l б)/Cy; npи Х = А ei(A) = А£д„(1 б)/Су. еАА)=0. Сумма ei + e:=. LAn (l б) Ку постоянна на интервале О - А. геометрии вольт-метрических характеристик = / (х) и = / (л:) выводится соотношение Таким образом, описанная схема датчика обеспечивает высокую точность измерения; не зависит от дестабилизирующих факторов; пригодна для использования в активных средах, так как для измерения используется разность проводимостей материала модулятора и окружающей среды; можег эксплуатироваться в широком температурном диапазоне и в магнитном поле, поскольку блок измерения не содержит термозависимых элементов и ферромагнитных материалов; может рат ботать в радиоактивной среде, так как не содержит активных полупроводниковых элементов. Размеры ЧЭ модулятора задаются техническими требованиями и при диапазоне измерения 1 мм с разрешающей способностью 1 мкм составляют А = 1 мм; Ь = 2 мм. При этом используется 10-разрядный АЦП. !образователь перемещений 4.6. Двухкоординап Для контроля перемещений подвижных частей и дегалей устройств по двум координатным осям в автоматизированных системах управления, робототехнике и т. д. необходим двухкоординатный преобразователь перемещений. Известны фотоэлектрические измерительные двух координатные преобразователи с разветвленными световодами типа «Фотоник» [101]. Они сравнительно недолговечны и требуют подстройки в связи с изменением интенсивности излучения источника света. Кроме того, в них длина световода определяет потери света от источника к фотоприемнику, что приводит к уменьшению точности преобразования перемещения в электрический сигнал. Совершенствование конструкции таких преобразователей приводит к необходимости сочетания разветвленного световода с оптической системой, что существенно усложняет устройство. - Емкостные преобразователи [102] имеют конструктивно-технологические недостатки, выражающиеся в нестабильности их характеристик при изменениях внешних условий - температуры, влажности, атмосферного давления. Емкостные преобразователи подвержены большим паразитным емкостным наводкам, в том числе и от изолирующих предметов, расположенных вблизи преобразователя. К их недостаткам следует отнести и значительную погрешность измерений, обусловленную взаимным влиянием перемещения объекта по одной координате на точность определения его положения подругой. Индуктивные двухкоординатные преобразователи перемещений состоят из четырех ЧЭ, выполненных в виде индуктивных катушек, расположенных крестообразно в одной плоскости, и модулирующего элемента в виде индикаторной катушки, расположенной по центру [103]. Измерение осуществляется изменением взаимной индуктивности катушек из-за перемещения индикаторной катушки вдоль соответствующей оси координат. Такие устройства содержат многовитковые обмотки, магнитные материалы, что обусловливает их сложность в изготовлении и материалоемкость. Они громоздки из-за значительного разнесения катушек (при уменьшении размеров индикаторной катуш- ки уменьшается чув( ibHOCTb). Точность таких преобразователей ограничена вследствие разброса их параметров при сборке и настройке. Блок измерения их характеризуется повышенной сложностью изготовления, так как выполнение профилированных обмоток с изменяемой плотностью ч[1сла витков вызывает значительные технологические трудности. Уменьшение влияния краевых эффектов путем разнесения вторичных обмоток на расстояние не менее трех их диаметров приводит к увеличению габаритов блока измерения и уменьшению чувствительности преобразователя. Воздушный трансформатор, образованный сравнительно громоздкими первичной обмоткой и двумя парами вторичных обмоток, подвержен воздействию помех от внешних электромагнитных полей. В процессе сборки блока измерения преобразователя необходимо выполнить операции настройки и юстировки конструкции, что в условиях серийного производства приводит к разбросу параметров преобразователей и ограничению их точности. Наиболее простым и точным может служить двухкоординатный по-лосковый преобразователь, в котором ЧЭ блока измерения выполнены в виде размещенных над общим проводящим основанием полосковых проводников, содержащих параллельные последовательно соединенные участки равной длины, расположенные крестообразно, а подвижный модулирующий элемент выполнен в виде электрически не связанной с элементами электронной схемы проводящей пластины в форме диска, расположенной над ЧЭ, перекрывающей их на половине длины параллельных участков, отделенной от ЧЭ слоем диэлектрика и взаимодействующей с параллельными участками путем изменения их индуктивности при перемещении пластины. Блок измерения содержит дифференциальный трансформатор напряжения с двумя парами встречно включенных первичных обмоток и вторичной обмоткой, подключенной •своими выходами к информационным входам блока обработки сигнала, а средней точкой - к выходам первичных обмоток и шине нулевого потенциала Входы первичных обмоток первой и второй пары соединены соответственно с выходами ЧЭ. Первичные и вторичная обмотки дифференциального трансформатора выполнены в виде полосковых проводников, расположенных в параллельных плоскостях. Чувствительные элементы, .дифференциальный трансформатор и модулирующий элемент изготавливаются по известной технологии печатного монтажа, широко используемой в электронике. Объединенные входы ЧЭ через первый и второй ключевые транзисторы подключены соответственно к первому и третьему элементам задержки, к третьему и четвертому управляющим входам блока обработки. Выходы задающего генератора и выходы второго элемента подключены ко входам первого элемента «ИЛИ», соединенного своим выходом с первым управляющим nfinnft"* " обработки сигналов. Второй управляющий вход блока оораоотки соединен с выходом второго элемента .«ИЛИ», входы которого соединены с выходами первого и третьего элементов задержки агип°" печатного монтажа обеспечивает высокую однород-чйг н """згаитного поля полосковых проводников ЧЭ практически по всей длине, что исключает краевые эффекты и дает возмож- [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [ 25 ] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] 0.0109 |