
|
|
|
Главная страница Магнитные цепи [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [ 48 ] [49] [50] Магнитоферрожидкостные опоры. В последние годы в различных областях техники и в медицине получили распространение феррожидкости-коллоидные растворы ферромагнетиков. Наибольшее применение в настоящее время они нашли для магнитных уп- 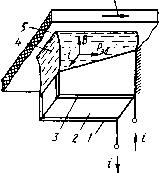 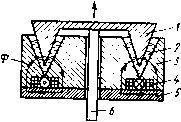 Рис. 15.6. Принцип действия коидукциоииой магиитогидро-динамнческой опоры Рис. 15.7. Магнитоферрожидкост-ная опора уууу уу/уу/. лотнений вращающихся валов с целью предотвращения проникновения вдоль вала среды изнутри устройств наружу или наоборот. Но феррожидкости могут применяться и в магнитных опорах. Опора (рис. 15.7) имеет магнитную систему, состоящую из твердых ферромагнитных деталей 5 и 5, обмотки 4 и феррожидкости 2, заполняющей кольцевой конусообразный зазор в детали 5. При протекании тока по обмотке в феррожидкости создается неоднородное магнитное поле, напряженность которого увеличивается к вершине конусообразного зазора. Феррожидкость, стремясь переместиться в область поля с большой напряженностью (вниз), выталкивает из себя немагнитный фигурный диск /, который перемещается при Этом вверх вместе со штоком 6. Применение феррожидкости для магнитного уплотнения вала иллюстрируется рис. 15.8. Феррожидкость 5 находится в зазорах между зубчатыми поверхностями кольцевых ферромагнитных полюсов 3 и ферромагнитным валом 4 и удерживается в этих зазорах магнитным полем, создаваемым кольцевым постоянным магнитом 2. Полюса 3 и постоянный магнит закреплены на неподвижном немагнитном основании /. 290 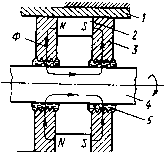 Рис. 15.8. Пример феррожид костного уплотнения вала § 15.4. Электромагимтиые опоры Электромагнитные опоры нашли применение в устройствах автоматики и в приборостроении. Электромагнитные опоры производят центрирование подвижной части устройства. Схема двухкомпонентной электромагнитной феррорезонансной опоры приведена на рис. 15.9, а. Опора состоит из магнитопровода /, четырех обмоток 2, надетых на полюса магнитопровода. Каждая обмотка с последовательно включенной емкостью С запитывается от источника переменного тока. Якорь 3 жестко связан с подвижной частью устройства и может в пределах воздушного зазора пе- 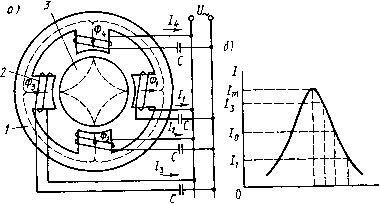 Рис. 15.9. Электромагинтнан феррорезонанснаи опора ремещаться, приближаясь к полюсу магнитопровода или удаляясь от него. При смещении якоря от центрального положения на него действует электромагнитная сила, стремящаяся вернуть якорь в исходное состояние. Такая электромагнитная сила называется центрирующей. Рассмотрим процесс возникновения центрирующей силы при горизонтальном смещении якоря. При перемещении якоря изменяется проводимость воздушного зазора и соответственно меняется значение тока на резонансной кривой (рис. 15.9,6). Емкости С выбираются такими, чтобы при центральном положении якоря (Л=Ло) значение тока /о в обмотках опоры находилось на зарезоиансной части кривой /=/(Л). При приближении якоря к правому полюсу проводимость между полюсом и якорем увеличивается до Ль ток в обмотке этого полюса в соответствии с кривой I=f{A) уменьшается до /] и, следовательно, уменьшается сила притяжения Pi якоря к полюсу. Вместе с тем удаление якоря от левого полюса приводит к умень- шению проводимости между этим полюсом и якорем до Лз и резкому увеличению тока до I3, в результате чего сила притяжения Р3 якоря к левому полюсу возрастает. Центрирующая сила (15.4) Воздущный зазор в феррорезонансных опорах невелик. Он составляет 0,1-0,5 мм, поэтому для определения сил Pi и Рз можно использовать приближенную формулу Максвелла Pi = 0?/2ixo5; Яз=ф1/2!х„5, (15.5) где Ф] и Фз - потоки правого и левого полюсов; S - площадь сечения полюса. Подставляя (15.5) в (15.4), получаем Я=(Фз фП/2(х„5. При симметричном положении якоря Ф1 = Фз и Рц=0. Если якорь сместится вправо, Фз возрастает, а Ф] уменьщается, в результате чего образуется Рц=70. Изменение потоков Ф] и Фз обусловлено резким изменением токов /] и /3 в соответствии с резонансной кривой /=/(Л). При вертикальных смещениях якоря аналогично создается центрирующая сила опоры. Отношение центрирующей силы к перемещению якоря называется жесткостью опоры: K=PJx. Здесь X -перемещение якоря. Чем больще жесткость опоры, тем с меньшими перемещениями подвижной части работает устройство и тем точнее осуществляется центрирование его подвижной части. Принципиальная схема электромагнитной опоры, выполненной на базе соленоидного электромагнита, приведена на рис. 15.10. Опора состоит из соленоида /, внутри которого расположен цилиндрический якорь 2, связанный с подвижной частью устройства. Электромагнитная сила соленоида уравновещивает силу тяжести якоря и внешнюю силу, если последняя действует в том же направлении, что и сила тяжести якоря. Зависимость силы втягивания якоря Рэм от его перемещения х приведена на рис. 15.11. Суммарная сила Рмг от постоянной внешней нагрузки и силы тяжести якоря изображена прямой, параллельной оси абсцисс. Точка пересечения этих линий определяет координату зависания хзав или х"заъ. В положении, соответствующем координате хз&ъ (точка /), якорь находится в неустойчивом равновесии, так как небольшое смещение якоря (при уменьшении х) вызывает дальнейшее его перемещение, вследствие того, что электромагнитная сила Рэм становится меньше механической Pmi-292 При смещении якоря вверх (при увеличении х) электромагнитная сила Рэм становится больше механической Рмг, и якорь поднимается до перехода в положение, соответствующее координате хзли (точка 2). В этом положении якорь находится в состоянии устойчивого равновесия. Если якорь сместится вниз от точки 2, что соот- Рис. 15.10. Солеиоидиаи опора 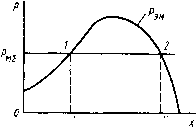 Рис. 15.11. Характеристика солеиоид-иой опоры ветствует уменьшению координаты х, то будет Рзм>Рм1 и якорь возвращается в первоначальное положение. Если якорь сместится вверх от точки 2, т. е. при увеличении х, то будет Рэм<Рм1, что приводит к возвращению якоря в точку 2. При уменьшении внешней силы якорь втягивается внутрь соленоида, а при увеличении опускается вниз. Если на якорь действует переменная внешняя сила, то он будет перемещаться вдоль оси соленоида. Электромагнитные опоры с внешней системой стабилизации нашли применение в ряде областей техники, например для подвески роторов центрифуг и моделей в аэродинамических трубах. Принципиальная схема электромагнитной опоры с внешней системой стабилизации приведена на рис. 15.12. Ферромагнитная деталь 4, связанная с подвижной частью устройства, удерживается вблизи соленоида / магнитным полем, симметричным относительно вертикальной оси и расходящимся книзу. Благодаря такой топографии поля достигается устойчивость этой детали в горизонтальной плоскости. Стабилизация вертикального положения детали обеспечивается внешней следящей системой. При смещении детали 4 в вертикальном направлении появляется на выхо- Рис. 15.12. Электромагнитные опоры с внешней системой стабилизации де датчика 3 сигнал, который подается яа усилитель 2. Усилитель преобразует сигнал и изменяет соответствующим образом ток / соленоида. Если деталь 4 сместится вниз, то ток соленоида увеличивается, а при смещении детали вверх ток соленоида уменьшается. Изменение тока соленоида приводит к возвращению детали в исходное положение. Для гашения автоколебаний применяется жидкостной демпфер 5, который устраняет автоколебания за счет трения подвижной детали о неподвижную жидкость. Электромагнитные опоры с внешней системой стабилизации работают при малых перемещениях подвижной части устройства. В случае необходимости устанавливают системы стабилизации по трем осям координат. ЗАКЛЮЧЕНИЕ Уважаемые читатели! Вы ознакомились с вопросами теории и особенностями конструкций многих электромеханических аппаратов автоматики. Однако из-за большого разнообразия ЭМАА авторы не смогли в объеме данного учебника изложить все, что хотели. Так, в нем не описаны реле времени, электротепловые реле, шаговые искатели, грузоподъемные электромагнитные механизмы. Весьма кратко изложен материал по поляризованным электромагнитным реле, командной аппаратуре с герконами, исполнительным устройствам контроля и управления. Если поставить себе цель дать подробные сведения, то по каждому классу этих аппаратов, а также по аппаратам, описанным в учебнике, нужно было бы опубликовать отдельную книгу. Как вы убедились, большинство ЭМАА содержит магнитную систему, поэтому мы постарались подробнее рассмотреть в теоретическом отношении именно эту их составную часть, дали представление о расчете магнитных систем постоянного и переменного токов методами теории цепей, в том числе методом вариации картин магнитного поля, формы его граничных линий индукции (сепаратрис) и координат особых точек, который еще не излагался в учебной литературе. Впервые дан материал по использованию особых точек магнитного поля для создания ЭМАА - релейных аппаратов и магнитных опор. Многие вопросы по магнитным системам переменного тока мы рассмотрели с применением понятия условно-положительных направлений величин. Более подробно, чем в имеющейся учебной литературе по электрическим аппаратам, представлен материал по электромагнитным муфтам. Однако и в теоретической части из-за ограничений по объему учебника нам не удалось изложить все желаемое. Так, мы считаем, что будущим инженерам необходимо иметь сведения по тепловым расчетам ЭМАА, по критериальной (обобщенной) оценке их характеристик, влиянию внешних воздействующих факторов (температуры окружающей среды, механических воздействий, радиации и Др.), системам автоматизированного проектирования (САПР) и автоматизированным системам научных исследований (АСНИ) ЭМАА, численным методам анализа и методам аналогового и физического моделирования ЭМАА, планированию эксперимента при многофакторном исследовании и ряду других вопросов. Желающим углубить свои знания, полученные после изучения настоящего учебника, необходимо обратиться к специальной литературе. [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [ 48 ] [49] [50] 0.0117 |