
|
|
|
Главная страница Магнитные цепи [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [ 46 ] [47] [48] [49] [50] сам 1 и 2; Р„х - усилие возвратной пружины 4 (см. рис. 14.3); S - площадь поверхности трения, равная S=n/{Dl-dl)/4. (14.20) С учетом (14.18) -(14.20) полный момент, который может пройти через муфту, == *тр (Л„ - -Рмх) {Dl+Aflf,+db/l (А -f dl)]. (14.21) МДС обмотки через подведенное напряжение, число витков обмотки ш и ее сопротивление R равна F=UwlR, магнитное напряжение на двух последовательно соединенных зазорах 6i и бг равно U,=Flk„ = Uw/(RkJ, (14.22) где й„ - коэффициент, учитывающий магнитное напряжение на магнитопроводе и нерабочих зазорах. С учетом (14.21), (14.17) и (14.22) окончательно получим полный момент k,f{Dl + Didi + dl) 3(Oi + di) t/2a>2H.o5ip52p(5ip4-52p) . *2;?2(8,S2p--825lp)2 (14.23) Напомним здесь, что если под йтр иметь в виду Атр.с.с, то этот момент называется моментом со скольжением; если йтр.б.с, то по (14.23) получим момент без скольжения. § 14.5. Электромагнитные зубчатые и порошковые муфты Электромагнитная зубчатая муфта (ЭЗМ) передает момент и вращение от ведущей части муфты к ведомой с помощью пары деталей, имеющих мелкие зубья, расположенные на торцовых поверхностях дисков или конических поверхностях [27]. ЭЗМ с зубьями на торцовых поверхностях в варианте с неподвижной катущкой показана на рис. 14.13 в замкнутом (а) и разомкнутом (б) положениях. Шлицевая втулка 4 вращается относительно неподвижной части 6 магнитопровода муфты и катущки 7 на подщипнике 5. Для соединения с ведущим валом в щли-цевой втулке 4 предусмотрена щпоночная канавка /. Со втулкой 4 муфты скользящим щлицевым соединением 3 связан якорь 8, который может перемещаться в осевом направлении - направо под действием электромагнитных сил притяжения к ведомой части 9 муфты, налево - под действием силы возвратной пружины 2, правый конец которой ограничен упором 10, являющимся частью шлицевой втулки 4. В отключенном положении между концами зубьев 12 ведомой части муфты 9 и якоря 8 должен быть зазор Дв (рис. 14.13, б), зависящий от геометрических размеров и точности изготовления муфты. Магнитные системы ЭЗМ отличаются от ЭФМ увеличенным ходом якоря, так как этот ход складывается из зазора Дв, который имеется и в ЭФМ, и хода, на длине которого зубья, расположенные на торцовой поверхности якоря 8, входят между зубьями на торцовой поверхности ведомой части 9 муфты. Для уменьшения потоков рассеяния Ф в якоре предусмотрены окна . Зубчатые муфты по сравнению с однодисковыми фрикционными муфтами позволяют передавать значительно большие моменты, а i б 7 8 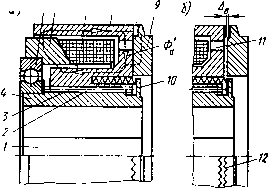 Рис. 14.13. Электромагнитная зубчатая муфта при передаче одинаковых моментов имеют меньшие габариты. Недостатком ЭЗМ является то, что сцепление и расцепление их возможно только при относительно малой разнице в линейных скоростях зубьев ведущей и ведомой частей. Увеличение этой разницы усиливает деформацию и износ зубьев. Электромагнитная порошковая муфта (ЭПМ) осуществляет связь между ведомой и ведущей частями с помощью ферромагнитного порошка. Эта связь увеличивается при увеличении индукции магнитного поля. Ферромагнитный порошок является основной частью наполнителя, расположенного в зазоре между ведущей и ведомой частями муфты. Через этот зазор проходит рабочий магнитный поток. Схематично устройство простейшей ЭПМ с вращающейся катушкой показано на рис. 14.14. Ведущая часть муфты состоит из ферромагнитного полого цилиндра 3 и немагнитных зубчатого колеса / и крышки 7. При обесточенной катушке 4 ведущая часть может свободно проворачи-  Рис. 14.14. Простейшая электромагнитная порошковая муфта с вращающейся катушкой ваться относительно ведомого вала 9. на котором жестко закреплена ферромагнитная ведомая часть 2 муфты с катушкой 4 и контактными кольцами 8. Элементы 2 п 3 образуют магнитопровод. При подаче сигнала управления создается рабочий поток Ф, который, замыкаясь по частям 2 п 3 магиитопровода, проходит через цилиндрический зазор 5 с наполнителем (показан точками). Механическая связь между ведущей и ведомой частями муфты усиливается. Так как зазор 5 рабочий поток проходит дважды, такая муфта называется «двухзазорной», а так как зазор имеет форму цилиндра - «цилиндрической». Уплотнители 6 необходимы для того, чтобы частицы наполнителя не проникали к местам трения ведущей части муфты о ведомый вал (уплотнение рабочей области ЭПМ на рис. 14.14 показано условно). Наполнители ЭПМ представляют собой смесь ферромагнитного порошка с разделительной средой. В ЭПМ с жидким наполнителем разделительная среда - минеральное, кремнийорганическое и другие жидкие масла; в ЭПМ с сухим наполнителем разделительная среда - мелкодисперсные порошки окиси цинка, окиси магния, талька, слюды и др. Разделительная среда уменьшает износ частиц ферромагнитного порошка, предотвращает их слипание и комкование. В качестве ферромагнитного порошка используется обычно карбонильное железо с размерами частиц порядка нескольких микрометров. Большинство ЭПМ имеет цилиндрический рабочий зазор. Длина рабочего зазора зависит от размеров муфты, размеров частиц ферромагнитного порошка и бывает обычно в диапазоне 0,4-3 мм. ЭПМ можно классифицировать по разным признакам: по виду наполнителя (с сухим и жидким); по виду токосъема (с вращающейся катушкой и контактными кольцами, с неподвижной катушкой без контактных колец); по количеству рабочих зазоров, пронизываемых потоком последовательно (двухзазорные, многозазор-иые); по форме рабочих зазоров (цилиндрические, конические, дисковые); по инерционности ведомой части (инерционная, средней инерционности и малоинерционная). В малоинерционных ЭПМ ведомая часть муфты изготовляется в виде тонкостенного цилиндра с малым моментом инерции. Конструкция такой муфты в варианте с неподвижной катушкой показана на рис. 14.15. Ведущая часть муфты состоит из жестко соединенных между собой деталей: ведущего зубчатого колеса 10, шпонки , крышки 12, немагнитной части 13, пружинного кольца 14, двух кольцевых постоянных магнитов 23, ферромагнитного кольца 4, немагнитного кольца 3, вращающейся части магиитопровода 24, пробки 25 (закрывающей отверстие для заполнения муфты порошком), внутренних обойм подшипников 7 и 26 и наружных обойм подшипников 17 и 19. Ведомая часть муфты состоит из жестко соединенных между собой ведомого зубчатого колеса 15, гайки и шайбы 16, распорной втулки 18, ведомого вала 20, защитной шайбы 21, немагнитного козырька 6, ферромагнитного кольца 5 и внутренних обойм подшипников 17 и 19. Неподвижная часть муфты состоит из жестко соединенных между собой корпуса /, катушки 2, пружинных колец 8 и 28, крышек 9 и 27, кожуха 29. Крепление крышек 12 я 27 к элементам 13 и 1 конструкции, а также узлы для крепления корпуса / муфты не показаны. Рабочий поток Ф проходит через нерабочие зазоры 6i и 62, отделяющие неподвижную часть муфты от вращающейся ведущей части, и рабочие зазоры бз и 64, заполненные наполнителем (пока-  Рис. 14.15. Малоинерционная электромагнитная порошковая муфта с неподвижной катушкой зан точками). Конструкция муфты рис. 14.15 предусматривает использование сухого наполнителя. Уплотнение пространства, занятого наполнителем, осуществляется здесь комбинированно: с помощью козырька 6, постоянных магнитов 23, лабиринта 22 и защитной шайбы 21. Постоянные магниты образуют поток, замыкающийся по каждому из постоянных магнитов и дважды проходящий через зазор между ними. Частицы, проникшие в этот зазор, располагаются в нем по направлению линий индукции между противоположными полюсами постоянных магнитов. При этом возникают два сплошных слоя из нитей, образованных притянувшимися друг к другу ферромагнитными частицами. Эти два слоя препятствуют дальнейшему продвижению частиц ферромагнитного порошка по направлению к подшипнику 19. Дальнейшее продвижение частиц, прошедших козырек и постоянные магниты, к подшипнику 19 затрудняет лабиринт 22 и защитное кольцо 21. Оба постоянных магнита укреплены в немагнитных элементах 13 ведущей и 6 ведомой частей муфты. Преимущества и недостатки. ЭПМ при одинаковых передаваемых мощностях и моментах по габаритам и массе обычно несколько больше, чем ЭФМ и ЭЗМ. Однако по сравнению с последними ЭПМ обладают более высоким быстродействием (до единиц миллисекунд), большей частотой переключения, в них отсутствуют изнашивающиеся поверхности. ЭПМ используются не только в релейном режиме (включено - отключено), для которого, в основном, предназначены ЭФМ и ЭЗМ, но и для ограничения вращающего момента и управления процессами ускорения и замедления механизмов. ЭПМ может работать в режиме постоянного скольжения. Момент, передаваемый ЭПМ, почти не зависит от скольжения и практически линейно связан с током в обмотке муфты, поэтому на базе ЭПМ создаются тормозные устройства, работающие в режиме постоянного торможения. С помощью таких тормозов, снабженных измерителями момента, можно поддерживать постоянной или изменять по заданной программе статическую нагрузку (при отводе выделяющейся в муфтах теплоты). ЭПМ позволяют рещать специальные задачи привода, которые с ЭФМ и ЭЗМ решаются хуже или вообще не решаются. ЭПМ применяются, в частности, в приводах большой мощности в качестве сцепных муфт и тормозов при тяжелых условиях пуска (в электроприводах буровых лебедок); в системах регулирования натяжения в текстильных машинах, арматурно-навивочных машинах; в приводах антенн, рулевых устройств, лентопротяжных механизмов и т. д. Недостатком ЭПМ является невозможность их работы при относительно больших линейных скоростях наполнителя: электромагнитные силы сцепления ферромагнитных частиц становятся соизмеримыми с действующими на эти частицы центробежными силами. При этом теряется управляемость муфтой. Наполнитель ЭПМ имеет ограниченный срок службы (обычно несколько сотен часов), по истечении которого требуется его замена. ГЛАВА 15. МАГНИТНЫЕ ОПОРЫ Механические опоры подвижных объектов, выполняемые в виде различных подшипников, подпятников и др., широко используются в технике. Однако возрастающие скорости подвижных объектов, требования по повышению ресурса, чувствительности и точности различных устройств, требования надежной работы в условиях сверхвысоких и сверхнизких температур и в глубоком вакууме, а также необходимость получения высокочистых материалов с применением бестигельной плавки привели к созданию других видов опор. Магнитные опоры, принцип действия которых основан на законах магнитостатики или магнитодинами-ки, получили наибольшее применение. К ним относятся следующие виды: электромагнитные опоры, опоры на постоянных магнитах, индукционные, диамагнитные, кондукционные, магнито-гидродинамические, магнитоферрожидкостные и комбинированные опоры. Объект может находиться относительно своей опоры в следующих четырех состояниях. 1. Объект перемещается. Это означает, что результирующая сила, действующая на него, не равна нулю. Под результирующей си-282 лой понимается векторная сумма всех сил, в том числе гравитационной силы Рг (силы веса) и реакции опоры. 2. Объект находится в неустойчивом равновесии (HP). В положении, соответствующем этому состоянию, результирующая сила отсутствует, однако при смещении объекта она появляется и стремится увеличить смещение. 3. Объект находится в устойчивом равновесии (УР). При смещении объекта из положения, соответствующего этому состоянию, также появляется результирующая сила, но в отличие от предыдущего случая она стремится уменьшить смещение. Такое состояние объекта характеризуется минимумом потенциальной энергии системы - «потенциальной ямой». 4. Объект находится в нейтральном равновесии, что характеризуется отсутствием результирующей силы в любом положении объекта на данном участке линии или поверхности. Идеальная опора обеспечивает левитацию (свободное парение) объекта, состоящую в том, что при отсутствии механической связи с опорой равновесие объекта вдоль любой оси координат устойчиво или нейтрально. Проблема устойчивости объекта имеет первостепенное значение при разработке магнитных опор. Еще в 1839 г. английский ученый Ирншоу доказал, что статическая система тел, притягиваюш,их или отталкивающих друг друга с силой, обратно пропорциональной квадрату расстояния между ними, не может находиться в состоянии устойчивого равновесия. Эта теория была в 1939 г. развита Браунбеком. Ученый доказал, что система, в которой действуют статические гравитационное, магнитное и электрическое поля, левитация возможна лишь при наличии тел, изготовленных из материалов с относительной диэлектрической проницаемостью ег< 1 или относительной магнитной проницаемостью Цг<1. Так как не известны материалы с ег<1, то в электростатическом поле левитация невозможна. В статическом магнитном поле, т. е. при использовании постоянных магнитов или электромагнитов, обмотки которых питаются постоянным током неизменной величины, левитацию можно осуществить в том случае, если хотя бы часть системы выполнена из диамагнитного материала. Диамагнетиками при нормальных температурах являются, например, висмут и графит. Идеальным диамагнитным качеством (р,г=0) обладают сверхпроводники первого рода *, находящиеся в сверхпроводящем состоянии. К таким сверхпроводникам относятся некоторые чистые металлы, например свинец, олово и ртуть. Во внутрь сверхпроводника с идеальными диамагнитными свойствами поле не проникает (эффект Мейсснера). * Сверхпроводники первого рода в отличне от других сверхпроводников имеют только два возможных состояния: нормальное и сверхпроводящее. [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [ 46 ] [47] [48] [49] [50] 0.0116 |