
|
|
|
Главная страница Магнитные цепи [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [ 41 ] [42] [43] [44] [45] [46] [47] [48] [49] [50]  Раздел пятый Исполнительные устройства и опоры Исполнительные устройства и опоры являются неотъемлемой частью систем автоматики. Исполнительные устройства преобразуют какую-либо электрическую величину, например ток, в механическую (усилие, момент, перемещение и др.). По принципу действия исполнительные устройства можно разделить на магнитоэлектрические, ферродинамические, электромагнитные поляризованные, электромагнитные и др. Опоры могут быть механическими, пневматическими, гидравлическими, электрическими и магнитными. В настоящем разделе рассматриваются только магнитные опоры как наиболее распространенные. Магнитные опоры преобразуют внешнее возмущающее воздействие в электромагнитное и обратно. ГЛАВА 13. МАГНИТОЭЛЕКТРИЧЕСКИЕ, ФЕРРОДИНАМИЧЕСКИЕ, ЭЛЕКТРОМАГНИТНЫЕ ПОЛЯРИЗОВАННЫЕ И ЭЛЕКТРОМАГНИТНЫЕ ИСПОЛНИТЕЛЬНЫЕ УСТРОЙСТВА В различных системах и устройствах автоматики возникает необходимость в преобразовании электрических сигналов в механические. Для этой цели разработаны и применяются многочисленные исполнительные устройства. Исполнительным устройством называется устройство, осуществляющее перемещение регулирующего органа в соответствии с управляющими сигналами, поступающими от измерительного преобразователя или управляющего элемента. Широкое распространение получили магнитоэлектрические, ферродинамические, электромагнитные поляризованные и электромагнитные исполнительные устройства. В зависимости от требований, предъявляемых к исполнительному устройству, применяется та или иная его схема. Например, для получения высокой линейности характеристики управления целесообразно использовать магнитоэлектрические исполнительные устройства, однако они не работают на переменном токе. В данной главе дается краткое описание принципа действия и характеристик исполнительных устройств. § 13.1. Магнитоэлектрические исполнительные устройства Магнитоэлектрические исполнительные устройства нашли широкое применение в различных системах автоматики. Он имеют лучшие характеристики, чем ферродинамические исполнительные устройства, при одинаковых габаритных размерах. Магнитоэлектрические исполнительные устройства имеют высокую линейность характеристики управления при фиксированном положении подвижной части и обладают хорошей стабильностью характеристик. Недостатками магнитоэлектрических исполнительных устройств является подверженность их влиянию магнитных полей и работа только на постоянном токе. На рис. 13.1, а приведена принципиальная схема магнитоэлектрического исполнительного устройства, предназначенного для 4- 5 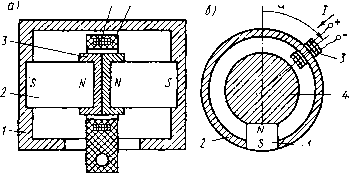 Рис. 13.1. Магнитоэлектрические исполнительные устройства: а - принципиальная схема устройства, преобразующего ток в усилие; б - схема устройства, работающего при больших угловых перемещениях создания усилий, действующих на подвижную часть механизма при небольших ее перемещениях. Устройство состоит из двух постоянных магнитов 2, включенных встречно, магиитопровода /, катушки 4, установленной внутри пластмассовой детали 5, и ферромагнитного кольца 3. Постоянные магниты создают индукцию в воздушном зазоре, в котором расположена катушка. Катушка связана с подвижной частью устройства и может перемещаться в воздушном зазоре, не касаясь магнитной системы. При прохождении через катушку постоянного тока на нее действует сила Здесь Въ - индукция в воздушном зазоре; / - ток, протекающий через катушку; /ср - длина среднего витка катушки; ш -число витков катушки. Значение индукции В(, в воздушном зазоре определяется из расчета магнитной цепи. Максимальное значение тока ограничивается нагревом катушки. Направление силы, действующей на катушку, определяется по правилу левой руки. При постоянном значении индукции характеристика управления линейная. На рис. 13.1, б изображена схема магнитоэлектрического исполнительного устройства, работающего при больших угловых перемещениях катушки относительно магнитопровода. Оно имеет магнитопровод, состоящий из кольца 2 и цилиндра 4. Между кольцом и цилиндром закреплен постоянный магнит / таким образом, чтобы воздушный зазор был равномерным. Кольцо 2 охватывает подвижная катушка 3, которая может совершать угловые перемещения, не касаясь при этом магнитопровода. Момент вращения, действующий на катушку, M = BJlwr, где Вй - индукция в воздушном зазоре, создаваемая постоянным магнитом; / - ток, протекающий по катушке; /а -длина активной части витка катушки (т. е. части витка, находящейся в магнитном поле); w - число витков; г - радиус вращения катушки. При симметричном положении катушки относительно вертикальной оси {а=0) магнитоэлектрическое исполнительное устройство имеет линейную зависимость момента от тока (рис. 13.2), если же катушка находится в несимметричном положении, то зависимость момента от тока несколько отклоняется от прямой линии. Это происходит из-за влияния МДС катушки на значение индукции в воздушном зазоре. Если при отклонениях катушки по часовой стрелке момент растет, то при отклонениях против часовой стрелки момент уменьшается. В первом случае поток, создаваемый МДС катушки, складывается с потоком постоянного магнита, а во втором он вычитается, так как при этом потоки направлены встречно. Для повышения линейности характеристики управления следует использовать ее начальный участок, т. е. пропускать через обмотку 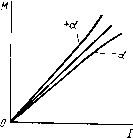 Рис. 13.2. Зависимости момента от тока в магнитоэлектрическом исполнительном устройстве небольшие токи, а для увеличения момента следует повышать индукцию в воздушном зазоре, уменьшая воздушный зазор или применяя постоянные магниты с большой энергией. На характеристику управления оказывает влияние изменение температуры окружающей среды. Изменение температуры на 10°С вызывает погрешность 0,2-0,3%. Кроме того, на характеристику управления влияют внешние магнитные поля, вибрация и удары. § 13.2. Ферродинамическме исполнительные устройства Ферродинамические исполнительные устройства предназначены для преобразования электрического тока в механическое усилие или в момент вращения. Для них характерны простота конструкции и технологии изготовления. Работают ферродинамические исполнительные устройства как на постоянном, так и на переменном токе. Ферродинамические исполнительные устройства отличаются от магнитоэлектрических тем, что подвижная обмотка с током расположена в магнитном поле, создаваемом другой обмоткой с током. Принципиальная схема ферродинамического исполнительного устройства приведена на рис. 13.3, а. На магнитопроводе / расположена неподвижная обмотка возбуждения 2, питаемая током /]. Вдоль верхней части магнитопровода перемещается обмотка управления 3, жестко связанная с подвижной частью механизма и питаемая током h. От взаимодействия тока h с магнитным полем, создаваемым током Л, образуется сила Р, действующая на подвижную обмотку: P=B,I4w, где В(,- индукция в воздушном зазоре, определяемая из расчета магнитной цепн; /а -активная длина витка (часть витка, находящаяся в магнитном поле); ву -число витков подвижной обмотки. В некоторых устройствах требуется, чтобы к подвижной части не присоединялись провода от источника питания. В этих случаях используются ферродинамические исполнительные устройства с подвижным магнитопроводом. Схема такого устройства приведена 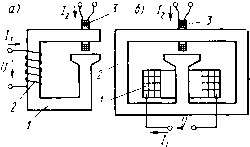 Рис. 13.3. Ферродииамическое исполнительное устройство: а - принципиальная схема; б -схема устройства с подвижным магнитопроводом на рис. 13.3, б. Обмотка возбуждения / жестко связана с обмоткой управления 3 и вместе с ней крепится на неподвижной части механизма. Подвижным является магнитопровод 2, который может перемещаться под действием силы от взаимодействия тока с магнитным полем системы относительно неподвижных обмоток в заданном диапазоне. Принцип действия этого устройства аналогичен вышеописанной схеме ферродинамического исполнительного устройства, однако в конструкции его предусмотрена возможность перемещения магиитопровода относительно неподвижных обмоток. Если питать обмотки ферродинамического исполнительного устройства переменными токами одинаковой частоты где ф - фазовый угол сдвига между токами Il и гг, то среднее значение силы, действующей на подвижную часть, будет Я,р = J /l„/2 sin a) sin (U)/ + ср) rfu)/ = kliJ2m COS cp. Сила, созданная ферродинамическим исполнительным устройством, зависит в этом случае не только от значений токов, ио и от угла сдвига фаз между токами. Ферродинамические исполнительные устройства используются в системах автоматического регулирования, в электрических реле и в измерительных приборах. § 13.3. Электромагнитные поляризованные исполнительные устройства Электромагнитные поляризованные исполнительные устройства наибольшее применение получили в системах автоматического управления, преимущественно в системах управления скоростью перемещения и в системах управления положением различных объектов. Обычные электромагниты в подавляющем большинстве имеют релейную характеристику. В отличие от них электромагнитные поляризованные исполнительные элементы обладают непрерывной характеристикой (выходная величина изменяется пропорционально входной). Линейное перемещение якоря или его угол поворота в таких устройствах пропорциональны электрическому сигналу, поступающему на вход. Схема электромагнитного поляризованного исполнительного устройства приведена на рис. 13.4, а. Оно состоит из магиитопровода /, якоря 2, обмотки управления 3 и обмотки возбуждения, состоящей из двух катушек 4, соединенных последовательно. Обмотка возбуждения неподвижно закреплена на стержнях магиитопровода. Обмотка управления также неподвижна, ее внутренний размер несколько больше ширины якоря. Благодаря этому якорь может поворачиваться на некоторый угол внутри обмотки управления. Между верхней частью якоря и магнитопроводом имеется небольшой технологический зазор бт, а между полюсными наконечниками магиитопровода и якорем имеются рабочие зазоры б. Обмотка возбуждения создает потоки Фв и Фв", проходящие по магнитопроводу, через рабочие воздушные зазоры и якорь. Обмотка управления образует поток Фу, разветвляющийся на два по- 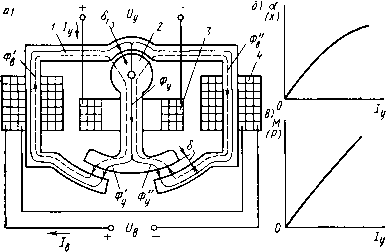 Рис. 13.4. Электромагнитное поляризованное исполнительное устройство: а - принципиальная схема; б - статические характеристики устройства тока -Фу И Фу", замыкающиеся через рабочие зазоры магиитопровода и технологический зазор. При питании обмотки возбуждения и отсутствии тока в обмотке управления якорь занимает устойчивое среднее положение. При подаче тока в обмотку управления создаются потоки Фу и Фу". В левом рабочем зазоре поток Фу складывается с потоком Фв, а в правом зазоре потоки Фу" и Фв" направлены в разные стороны. Сила, действующая на якорь со стороны левого полюса, становится больше силы, действующей со стороны правого полюса, в результате чего якорь повернется по часовой стрелке. Если изменить полярность обмотки управления, то в левом рабочем зазоре будет разность потоков Фу и Фв, а в правом - сумма потоков Фу" и Фв", и якорь повернется против часовой стрелки. Статической характеристикой электромагнитного поляризованного исполнительного устройства является зависимость перемещения подвижной части (хода якоря) от тока управления (рис. 13.4, б). С увеличением тока управления растет перемещение яко- [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [ 41 ] [42] [43] [44] [45] [46] [47] [48] [49] [50] 0.0099 |