
|
|
|
Главная страница Магнитные цепи [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [ 39 ] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] Схема преобразователя угловой скорости в электрический сигнал приведена на рис. 12.3. По принципу действия этот преобразователь относится ко второй группе. Преобразователь состоит из постоянного магнита /, жестко связанного с магнитопроводом 2, на стержнях которого расположена обмотка. Обмотка состоит из двух катушек 3, соединенных последовательно и согласно. При вращении зубчатого колеса 4 периодически меняются полная прово- 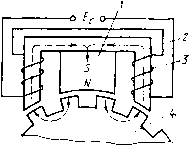 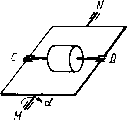 Рис. 12.3. Преобразователь угловой скорости Рис. 12.4. Схема гироскопа димость системы и магнитный поток, пронизывающий обмотку, в результате чего в обмотке наводится ЭДС, пропорциональная скорости вращения колеса. Наибольшее изменение магнитного потока ДФ=f•/Zд,-/(Zд,-l-ДZд,), где -МДС магнита, а 2м и {Zm-\-AZm) - крайние значения магнитного сопротивления. Амплитуда и действующее значение потока при синусоидальном его изменении соответственно равны Ф„ = ДФ/2; Ф=ДФ/(2>2). ЭДС, индуктируемая в обмотке, juiwF I 1 ±1-2 I При расчете обмотки необходимо учитывать реакцию ее поля, т. е. влияние МДС катушки на индукцию в воздушном зазоре. Ток обмотки должен быть достаточно мал, чтобы МДС ее была значительно меньше магнитного напряжения, создаваемого постоянным магнитом. При проектировании индукционного преобразователя скорости большое внимание следует уделить получению линейной зависимости индуктируемой ЭДС от скорости. Погрешность преобразователей первой группы составляет 0,02-0,1%. У преобразователей второй группы линейность преобразования зависит от магнитных характеристик ферромагнитных материалов, из которых выполнена магнитная цепь. Поскольку эти характеристики обычно нелинейные, преобразователи второй группы имеют большую погрешность. Индукционные преобразователи перемещений предназначены для измерения малых перемещений вращающихся тел. В ряде устройств, например в гироскопических приборах, требуется измерять угловые перемещения а вращающегося ротора относительно оси MN, перпендикулярной оси вращения CD (рис. 12.4). Эту задачу можно решить с помощью индукционного преобразователя перемещений, подвижная часть которого вращается вместе с ротором. Принципиальная схема преобразователя изображена на рис. 12.5. Магнитопровод / жестко связан с вращающимся ротором 3. Катушка 5 крепится к корпусу прибора с помощью пласт- 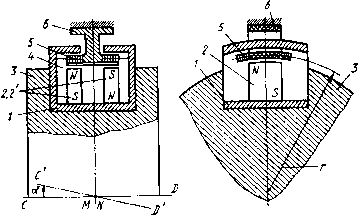 Рис. 12.5. Индукционный преобразователь угловых перемещений массового кронштейна 6 и находится в неподвижном состоянии. Такое крепление катушки позволяет устранить гибкие токоподводы, накладывающие вредный момент на подвижную часть устройства. Магнитная система преобразователя состоит из магиитопровода / и постоянных магнитов 2 и 2, создающих поток в воздушном зазоре 4. Магнитная система вместе с ротором может поворачиваться на небольшие углы относительно оси hAN, перпендикулярной плоскости чертежа. Для уяснения принципа работы преобразователя обратимся к схеме, изображенной на рис. 12.6, а, на которой показано сечение, проходящее через середину воздушного зазора, а катушка представлена в виде среднего витка. При вращении ротора постоянные магниты, имеющие противоположную полярность, наводят в катушке ЭДС, пропорциональную разности магнитных потоков, пересекающих ее. При симметричном положении катушки 5 (см. рис. 12.5) относительно магнитопрово- У*» да /, т. е. при отсутствии угла отклонения ротора, ЭДС, наводимая в катушке, вследствие равенства потоков равна нулю. При смещении катушки относительно магнитной системы на выходе преобразователя появляется сигнал, пропорциональный этому смещению (углу отклонения а). При определении зависимости выходного сигнала от перемещения примем следующие допущения: магнитное поле между полюсами принимаем однородным и сигнальную катушку считаем сосредоточенной в виде среднего витка. Выходное напряжение преобразователя U=~64r/6t. (12.7) Здесь потокосцепление Ч для сосредоточенной катушки можно представить так: Ф = а)е(Ф2-Ф2), (12.8) Рис. 12.6. Полюса (а) и характеристики (б) иидукциоииого преобразователя где Wc - число витков катушки; Фг и Фг - магнитные потоки, создаваемые соответственно магнитами 2 и 2 (см. рис. 12.5) и пересекающие сигнальную катушку. При смещении х катушки относительно магнитной системы можно записать Ф2=В(а/2-\-х)у; Ф2.=В(а/2-х)у, (12.9) где Bj - индукция в воздушном зазоре; а - размер полюса; х - смещение катушки относительно магнитной системы; у - текущая координата (рис. 12.6, а). Подставляя (12.8) и (12.9) в (12.7), находим L.„=2BjWe (X 6y/ut -{- у dx/dt). Учитывая, что ydx/dt<t:xdy/dt, получаем U,=2Biwx dy/dt=2B,wVx, где V=dy/dt - линейная скорость перемещения катушки относительно магнитной системы по осу у. Принимая во внимание, что V=nnr/30 и х=га, получаем (12.10) Здесь п - число оборотов вала в минуту; г и а - средний радиус и угловое смещение катушки относительно ротора. Из выражения (12.10) следует, что амплитуда выходного сигнала пропорциональна индукции в воздушном зазоре, скорости вращения ротора, числу витков сигнальной катушки, угловому перемещению и зависит от квадрата расстояния от оси вращения ротора до центра катущки. Зависимости изменения потокосцепления катушки и выходного сигнала от времени при принятых допущениях приведены на рис. 12.6,6. Реально выходной сигнал в пределах периода Т получается по форме близким к синусоидальному, так как из-за наличия потоков выпучивания изменения потокосцепления не происходит по прямой линии. Период Т соответствует одному обороту ротора. При наличии одной магнитной системы одному обороту ротора соответствует только один импульс сигнала. Для получения непрерывного сигнала следует располагать на роторе ряд магнитных систем. § 12.2. Пьезо>лвктрические преобразователи Пьезоэлектрические преобразователи основаны на использовании пьезоэлектрического эффекта, которым обладают некоторые кристаллы. Пьезоэлектрический эффект используется для преобразования переменных механических усилий в электрический сигнал. Пьезоэлектрические преобразователи широко применяются для измерения вибраций, переменных усилий и в ультразвуковых генераторах. Различают прямой и обратный пьезоэффекты. Прямой пьезо-эффект заключается в том, что под действием механических напряжений на гранях кри- , сталла возникают электрические заряды. Обратный пьезоэффект состоит в том, что под действием электрического поля происходит изменение геометрических размеров кристалла. Пьезоэффект наиболее сильно выражен у кварца, турмалина и у сегнетоэлектриков: сегнетовой соли, тита-ната бария и др. На рис. 12.7,0 показан пьезочувствительный элемент из кристалла кварца, который имеет форму параллелепипеда, при этом грани его ориентированы относительно кристаллографических осей Рис. 12.7. Пьезочувствительный преобразователь: а -кристалл кварца; б - эквивалеитиая схема X, у, z (х - главная, или оптическая, ось; у - электрическая ось; г - механическая, или нейтральная, ось). При действии силы сжатия Рх вдоль электрической оси иа гранях ABCD и EKGH, перпендикулярных оси х, возникают разиопо-лярные электрические заряды. Величина этих зарядов qx не зависит от геометрических размеров пьезочувствительного элемента и определяется выражением х=*„Р,. (12.1.1) где ku - пьезомодуль материала. Пьезомодуль характеризует чувствительность пьезоэлектрического материала и определяет величину электрического заряда, возникающего при приложении определенной силы (при Р=1 Н). Измеиение знака приложенной силы Рх приводит к изменению знака зарядов. Такой эффект называется продольным пьезоэффектом. При действии силы сжатия Ру, направленной вдоль оси у, на тех же гранях возникают также разнополярные заряды, величина которых зависит от приложенной силы и геометрических размеров граней: где SxH Sy - площади граней перпендикулярных осям х, у. Это явление называется поперечным пьезоэффектом. При поперечном пьезоэффекте знак зарядов противоположен знаку зарядов, возникающих при продольном пьезоэффекте под воздействием сил того же направления (в формуле учитывается знаком минус). Эквивалентная схема пьезоэлектрического преобразователя приведена на рис. 12.7, б, иа котором Са - емкость между гранями преобразователя; Ra - сопротивление преобразователя. При синусоидальной силе Рх=Ртхпы1 ток с учетом (12.11) i~6qJ6t=(ok„P„jc cos со/, где Ртх - амплитуда силы, действующей вдоль оси х. В соответствии с эквивалентной схемой выходное напряжение преобразователя .ых= JKPmxRJi 1 + JRM- Из этого выражения следует, что амплитуда выходного напряжения и сдвиг фаз между напряжением и измеряемой силой зависят от частоты. Пьезоэлектрические преобразователи для статических измерений ие используются, так как заряд, возникающий на гранях пьезо-элемеита, имеет малую величину. Кроме того, происходит его утечка через изоляцию. При динамических процессах под действием переменных сил количество электричества все время восполняется, поэтому пьезоэлектрические преобразователи применяются для измерения динамических величин. Наиболее широко в пьезоэлектрических преобразователях применяется кварц. Пьезомодуль кварца Ап = 2,3-10-2 Кл/Н, диэлектрическая проницаемость е = 40-10-2 ф/м, модуль упругости Е = = (74-10)10° Па. При изменении температуры до 400°С значение пьезомодуля практически ие меняется. Свыше 400°С наблюдается сильное уменьшение пьезомодуля, и при температуре 573°С пьезомодуль равен нулю. Кварцевые преобразователи с точки зреиия точности и стабильности характеристик являются наиболее подходящими для работы в расширенном диапазоне температур при больших значениях преобразуемых усилий. Недостатком кварца является малое значение пьезомодуля, низкая диэлектрическая проницаемость и малая собственная емкость кварцевых пластин, в результате чего емкость кабеля и нагрузки значительно уменьшает чувствительность преобразователя. Сегнетова соль имеет пьезомодуль fen = 300-l(>-2 Кл/Н, рабочий температурный диапазон от -15 до 22,5°С. Сильная зависимость пьезомодуля от температуры, малая прочность и гигроскопичность ограничивают применение сегнетовой соли. В настоящее время разработаны новые пьезоэлектрические материалы с рабочим температурным диапазоном до 200°С и высоким значением пьезомодуля. Малое значение выходного напряжения и большое внутреннее сопротивление пьезоэлектрических преобразователей требуют применения усилителей с большим входным сопротивлением. § 12.3. Термоэлектрические преобразователи (термопары) Явление термоэлектричества было открыто в 1823 г. Зеебеком [46] и заключается в следующем. Если составить цепь из двух различных проводников (или полупроводников) Л и В, соединив их между собой концами (рис. 12.8, а), причем температуру 01 одного места соединения сделать отличной от температуры 00 другого, то в цепи появится ЭДС, называемая термо-ЭДС: £ла(вхво)=/(в,)-/(во). Подобная цепь называется термопарой; проводники, составляющие термопару, - термоэлектродами, а места их соединения - спаями. При небольшом перепаде температур между спаями термо-ЭДС можно считать пропорциональной разности температур: Еав= -Sab-AQ, где S/1B -коэффициент пропорциональности; Д0= =01-00. У любой пары проводников величина термо-ЭДС зависит только от материала проводников и от температуры спаев и не зависит от распределения температуры между спаями. [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [ 39 ] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] 0.013 |
||||||||||||