
|
|
|
Главная страница Магнитные цепи [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [ 37 ] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] рис. 11.18,6. Характеристикане проходит через начало координат, и на ней можно выделить лишь небольшой линейный участок. Кроме того, на экран действуют значительные электромагнитные силы. Перечисленные недостатки проявляются значительно меньше в схемах индуктивных преобразователей с двумя обмотками. Прин- 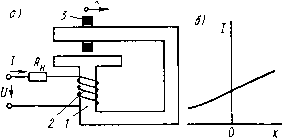 Рис. 11.18. Индуктивный преобразователь с КЗВ: а -принципиальная схема; б - характеристика управления дипиальная схема такого преобразователя показана на рис. 11.19. Преобразователь имеет замкнутый магнитопровод /, на крайних вертикальных стержнях которого расположены две одинаковые катушки- 2 и 2. Вдоль верхнего горизонтального стержня перемещается экран 3. Обмотки л) 2 Рис. 11.19. Симметричный индуктивный преобразователь с КЗВ преобразователя включены в два соседних плеча моста. В другие два плеча включены одинаковые балластные сопротивления Rt- При симметричном положении экрана индуктивности катушек равны, мост находится в равновесии и выходное напряжение равно нулю. При смещении к экрана от среднего положения индуктивность одной катушки увеличивается, а другой - уменьшается, в результате чего появляется выходное напряжение t/вых, зависящее от положения экрана. Характеристика управления такого преобразователя изображена на рис. 11.19, б. Характеристика расположена в первом и третьем квадрантах, имеет больший линейный участок и проходит через начало координат. На экран действует меньшая электромагнитная сила, так как она является разностью сил, создаваемых правой и левой катушками. Индуктивные магиитоупругие преобразователи предназначены для измерения значительных механических сил. Принцип действия магнитоупругих преобразователей основан на изменении магнитной проницаемости ц ферромагнитных тел под воздействием механических сил. Изменение магнитной проницаемости ферромагнитных материалов при действии механических напряжений называется магнито-упругостью. Хорошими магнитоупругими свойствами обладают же-лезоникелевые и железокобальтовые сплавы. Конструкционные стали имеют несколько худшие магиитоупругие свойства, но они обладают большей стабильностью характеристики. На рис. 11.20 приведены снятые при механических напряжениях растяжения кривые намагничивания никеля. Из анализа кривых видно, что у никеля под дейст- вием механических напряжений происходит уменьшение магнитной индукции В, а следовательно, и магнитной проницаемости. Принципиальная схема маг-нитоупругого преобразователя приведена на рис. 11.21, а. Преобразователь представляет собой замкнутый магнитопровод, на одном из стержней которого расположена обмотка. При изменении силы Р, действующей на магнитопровод, меняется полное электрическое сопротивление обмотки. Вклю- В Jfl 0,5 0,к 0,5 0,2 0,1
15 Н,кШ Рис. 11.20. Кривые намагничивания никеля тттт 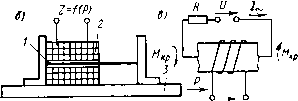 Рис. 11.21. Схемы магнитоупругих преобразователей Чая обмотку в потенциометрическую или мостовую схему, можно получить преобразование механической силы в электрическую величину (напряжение или ток). Магнитоупругий преобразователь для измерения деформаций (рис. 11.21,6) состоит из пермаллоевого провода /, помещенного внутри катушки 2, и жестко связанного с исследуемой деталью 3, на которую действует растягивающее усилие Р. Деформация пермаллоевого провода приводит к изменению индуктивности катушки и соответственно к изменению ее полного сопротивления. Преобразователи с использованием эффекта Видемана (рис. П.21,в) применяются для измерения крутящего момента. В ферромагнитном стержне при действии крутящего момента появляется винтовая составляющая повышенной магнитной проницаемости. Если при этом через стержень проходит переменный ток, то в нем возникает винтовая составляющая магнитного потока, которую можно считать результатом суперпозиции продольного и кругового потоков. Продольный переменный поток создает в обмотке, надетой на стержень, ЭДС, пропорциональную крутящему моменту. Статические характеристики (характеристики управления) маг-нитоупругих преобразователей обладают нелинейностью и неоднозначностью. Характеристика преобразователя, соответствующая увеличению его нагрузки, отличается от характеристики при его разгрузке. Неоднозначность характеристики определяется магни-тоупругим гистерезисом. Кроме того, для одного и того же материала под действием механического напряжения магнитная проницаемость в слабых полях может возрастать, в то время как в сильных полях - падать. Относительная чувствительность магнитопругого материала характеризуется коэффициентом где 6ц = Л}а/ц - относительное изменение магнитной проницаемости; б/= Л / -относительная деформация материала; о - механическое напряжение; Е - модуль упругости материала. Погрешность преобразователя, обусловленная магнитоупругим гистерезисом, зависит от режима его работы. Для уменьшения погрешности необходимо увеличивать напряженность магнитного поля, так как при этом необратимые процессы, связанные с переориентацией областей самопроизвольного намагничивания, ослабевают. § 11.4. Трансформаторные преобразоватепи Трансформаторные преобразователи широко применяются для измерения механических перемещений и сил. Трансформаторные преобразователи представляют собой трансформаторные устройства с переменной магнитной связью между первичной и вторичной обмотками. Трансформаторные преобразователи имеют две обмотки, включенные в первичную и во вторичную цепн. В отличие от индуктивных трансформаторные преобразователи не имеют гальванической связи между источником питания и цепью нагрузки. В трансформаторных преобразователях отсутствует скользящий контакт между подвижной и неподвижной частями. Их конструкция и технология изготовления просты. Конструкции трансформаторных преобразователей весьма разнообразны. В зависимости от предъявляемых требований они могут иметь или большую чувствительность, или высокую линейность, или не создавать усилия, действующего на подвижную часть преобразователя со стороны неподвижной. Иногда перечисленные требования необходимо выполнить одновременно. К недостаткам трансформаторных преобразователей относятся наличие остаточного сигнала (т. е. выходного сигнала, соответствующего входному, равному нулю) и подверженность помехам со стороны электромагнитных полей, если не приняты соответствующие меры. Трансформаторные преобразователи по конструктивным особенностям в зависимости от вида подвижной части делятся: на преобразователи с перемещающимся якорем, с перемещающимся электромагнитным экраном (короткозамкнутым витком), с перемещающейся обмоткой. На рис. 11.22 изображена схема трансформаторного преобразователя с перемещающимся якорем. Первичная обмотка надета на средний стержень 3. Вторичная обмотка, состоящая из двух ка- 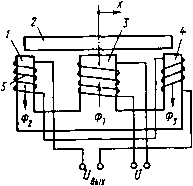 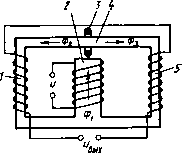 Рис. 11.22. Трансформаторный преобразователь с перемещающимся якорем Рис. 11.23. Трансформаторный преобразователь с перемещающимся экраном (с короткозамкнутым витком) тушек, включенных последовательно и встречно, расположена на крайних стержнях 1 и 4 магнитопровода. При симметричном положении якоря 2 на клеммах вторичных катушек возникают равные по величине, совпадающие по фазе, но противоположно направленные ЭДС. В этом случае выходное напряжение при идеальной магнитной и электрической симметрии преобразователя равно нулю. При смещении якоря происходит перераспределение магнитных потоков в крайних стержнях, так как меняются проводимости воздушных зазоров и на выходе появляется сигнал, зави- сящий от смещения якоря; фаза сигнала соответствует направлению смещения. Трансформаторные преобразователи с перемещающимся якорем не имеют подвижной обмотки, благодаря чему не требуются токоподводы к подвижной части, которые в преобразователях с перемещающейся обмоткой создают вредное усилие или момент. На якорь преобразователя действует электромагнитная сила, лритягивающая его к магнитопроводу. Электромагнитная сила нагружает подшипники устройства, увеличивая их момент трения. Кроме того, при смещении якоря от симметричного положения составляющая силы притяжения стремится вернуть его в исходное положение, т. е. в положение, соответствующее максимальной проводимости магнитной системы. Преобразователь с перемещающимся короткозамкнутым витком (КЗВ) изображен на рис. 11.23. Магнитная система имеет зазор между средним стержнем 2 и горизонтальным магнитопроводом 4. КЗВ 3 охватывают магнитопровод 4 и может свободно перемещаться вдоль него. Первичная обмотка, питаемая от источника U, надета на средний стержень, а последовательно и встречно включенные сигнальные катушки расположены на боковых стержнях / и 5. Первичная обмотка создает поток Ф,, разветвляющийся на потоки Фг и Фз. При отклонении КЗВ от симметричного положения происходит перераспределение потоков Фг и Фз, в результате которого образуется выходной сигнал (/вых, возрастающий по мере удаления КЗВ от нейтрального положения. Если в преобразователях с перемещающимся якорем действует электромагнитная сила, возникающая между подвижной и неподвижной частями, то в преобразователях с перемещающимся экраном возникает электродинамическая сила при взаимодействии потока первичной обмотки с током экрана, которая достигает существенной величины. Кроме того, преобразователи с подвижным экраном имеют значительные фазовые и температурные погрешности, поэтому такие преобразователи находят ограниченное применение. Наибольший интерес представляют трансформаторные преобразователи с перемещающейся обмоткой. Преобразователи такого типа имеют сравнительно высокую чувствительность, малые остаточные сигналы, практически не имеют электромагнитной силы, действующей на подвижную обмотку, и не чувствительны к поперечным колебаниям обмотки. Взаимная индуктивность между первичной и вторичной обмотками этих преобразователей изменяется при перемещении вторичной обмотки в магнитном поле, создаваемом первичной обмоткой. Преобразователь с вторичной обмоткой, перемещающейся вдоль магиитопровода, представлен на рис. 11.24. Магнитная система имеет воздушный зазор между вертикальным сердечником 2 и горизонтальным /. Последний охватывает вторичная обмотка 4. Пер- вичная обмотка 3, питаемая от источника V и создающая поток Фь расположена на среднем сердечнике. При симметричном положении вторичной обмотки она пронизывается равными и противоположно направленными магнитными потоками Фг и Фз, и поэтому результирующий сигнал близок к нулю. При смещении (х) обмотки один из потоков возрастает, а другой убывает, в результате чего образуется выходной сигнал (/вых, зависящий от перемещения. Магнитная система преобразователя с обмоткой, перемещающейся в воздушном зазоре (рис. 11.25), состоит из замкнутого магиитопровода / с одним воздушным зазором и надетой на средний 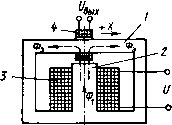 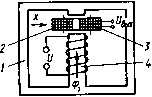 Рис. 11.24. Преобразователь линейных перемещений Рис. 11.25. Преобразователь с перемещающейся обмоткой стержень 4 первичной обмотки, питаемой от источника (/ и создающей поток Ф\. В воздушном зазоре помещается вторичная обмотка, состоящая из двух одинаковых катушек 2 и 5, включенных встречно. При симметричном положении вторичной обмотки в катушках наводятся равные по величине ЭДС и при встречном их включении выходной сигнал равен нулю. При перемещении вторичной обмотки значения ЭДС катушек меняются в зависимости от положения обмотки, в результате чего появляется выходной сигнал (/вых- На такой преобразователь магнитные поля практически не оказывают влияния, так как воздушный зазор шунтирован по отношению к внешнему магнитному полю магнитопроводом, имеющим малое магнитное сопротивление. Кроме того, такие преобразователи проще конструктивно и особенно удобны при сборке устройства, так как позволяют собирать отдельно подвижную часть устройства с подвижным узлом преобразователя, а затем уже проводить требуемую регулировку. В конструкциях преобразователей, аналогичных приведенной на рис. 11.25, разъем магнитной системы отсутствует. Выходной сигнал трансформаторного преобразователя в режиме без нагрузки (холостой ход) .b.x=">4jK2, (11-5) где - потокосцепление вторичной обмотки, изменяющееся при перемещении подвижной части (амплитудное значение). [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [ 37 ] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] 0.0134 |