
|
|
|
Главная страница Магнитные цепи [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [ 36 ] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] личие остаточного сигнала, чувствительность к изменению напряжения питания, а также наличие фазовых искажений. Работают индуктивные преобразователи только на переменном токе. Индуктивность обмотки магнитной системы с немагнитным зазором без учета рассеяния магнитного потока где w - число витков обмотки; Zm - полное магнитное сопротивление магнитной цепи; Rmc и Хмс - активная и реактивная составляющие магнитного сопротивления магнитопровода; /?мв и Хмь- активная и реактивная составляющие магнитного сопротивления немагнитного зазора. При этом где 1м - средняя линия магнитопровода; Sm и 5в - площади поперечного сечения магнитопровода и воздушного зазора; цо - магнитная проницаемость воздуха; рмлм и рмхм - удельное активное и реактивное сопротивление магнитопровода; рмжэк-эквивалентное удельное реактивное сопротивление немагнитного зазора, частично или полностью занятого электропроводным материалом (экраном). Здесь Rut, дано для равномерного магнитного поля. Приведенные уравнения показывают, что индуктивность обмотки зависит от изменения активной и реактивной составляющих магнитного сопротивления немагнитного зазора и от изменения активной и реактивной составляющих сопротивления магнитопровода. 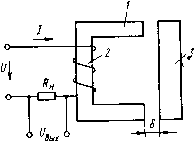 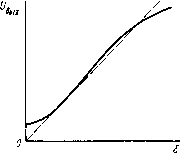 Рис. 11.12. Индуктивный преобразо- Рис. 11.13. Характеристика управ-ватель ления индуктивного преобразова- теля Схема нереверсивного индуктивного преобразователя с переменным активным магнитным сопротивлением немагнитного зазора приведена на рис. 11.12. Преобразователь состоит из С-образ-ного магнитопровода /, на который намотана обмотка возбуждения 2, и подвижного якоря 3. При перемещении якоря изменяется сопротивление магнитной цепи и, следовательно, индуктивность обмотки, что приводит к изменению ее полного сопротивления. Рассмотрим работу этого преобразователя при горизонтальных перемещениях якоря, изменяющих длину воздушного зазора б. Для малых величин б воздушного зазора с большой площадью поперечного сечения магнитопровода 5м = 5б магнитная проводимость Если пренебречь сопротивлением магнитопровода, которое для ненасыщенных систем мало по сравнению с магнитным сопротивлением воздушного зазора, то индуктивность Индуктивное сопротивление обмотки А=ш1=ш1го5;„а;2/(28), где со - угловая частота. Сопротивление электрической цепи преобразователя Z=yRX\ , где R=Ro6-\-Ra, Ro6 - активное электрическое сопротивление обмотки: Rn - сопротивление нагрузки. Выходное напряжение преобразователя UB..=fRn=URjVR4i<HSMmy В большинстве конструкций индуктивных преобразователей Xl>R. в этом случае U,,,2URM\oSm)- в полученном выражении переменной величиной является б. Зависимость, построенная по этой формуле (/вых=/(б), представляет собой прямую, проходящую через начало координат (рис. 11.13, штриховая линия). Реальная кривая, изображенная на рис. 11.13 сплошной линией, не проходит через начало координат. Это объясняется тем, что при 6 = 0 сопротивление магнитной цепи имеет конечное значение, и поэтому индуктивное сопротивление катушки не равно оо. При значительных воздушных зазорах характеристика управления отклоняется от линейной функции вследствие того, что в этом случае индуктивность обмотки становится соизмеримой с активным сопротивлением цепи. Кроме того, на величину индуктивности оказывают влияние возросшие потоки рассеяния, поэтому при больших зазорах индуктивность меняется мало. Индуктивные преобразователи такого типа имеют следующие недостатки: фаза выходного напряжения зависит от величины воздушного зазора; на якорь действует значительная электромагнитная сила; характеристика управления расположена только в пер- bom квадранте. В силу указанных недостатков эти преобразователи применяются редко. реверсивные индуктивные преобразователи имеют лучшие характеристики по сравнению с нереверсивными, и поэтому получили широкое распространение. Существуют две основные схемы включения реверсивных преобразователей: дифференциальная и мостовая. Дифференциальная схема включения показана на рис. 11.14,0. Преобразователь состоит из двух неподвижных С-образ- 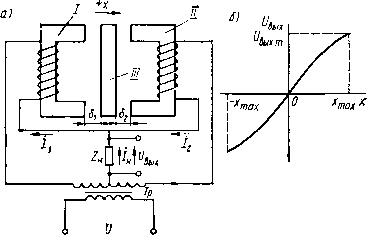 Рис. II.и. Реверсивный индуктивный преобразователь: а - дифференциальная схема; б - характеристика управления ных сердечников, на которые намотаны обмотки, имеющие одинаковое число витков. Между неподвижными сердечниками располагается подвижный якорь. Сопротивление нагрузки включается между средней точкой вторичной обмотки трансформатора Тр и средней точкой обоих сердечников. При таком включении ток нагрузки равен разности токов левой и правой половин схемы: /„ = /1-/2. Выходное напряжение ивых= {I\-h)ZH. В нейтральном положении якоря зазоры между подвижным и неподвижными сердечниками равны 61 = 62 = 6. Индуктивности обмоток также равны, поэтому токи /1 и /2 равны по модулю и совпадают по фазе, но имеют противоположное направление при прохождении через сопротивление нагрузки, в результате чего ток нагрузки /н=0 и выходное напряжение ивыт = 0. Перемещение якоря вызывает увеличение одного зазора и уменьшение другого. Это приводит к изменению индуктивностей обмоток, и на сопротивлении нагрузки появляется напряжение, пропорциональное перемещению подвижного сердечника. На рис. 11.14,6 показана характеристика управления дифференциального индуктивного преобразователя. С увеличением перемещения X якоря от нейтрального положения (х=0 при симметричном положении якоря) выходное напряжение растет по закону, близкому к линейному, при значительных перемещениях происходит замедление роста выходного напряжения, так как при больших зазорах одна из индуктивностей меняется мало. Изменение знака £/вых при изменении знака х означает изменение фазы выходного напряжения преобразователя на 180°. В мостовой схеме индуктивного преобразователя (рис. 11.15) обмотки сердечников / и включаются в смежные плечи моста. В два других плеча включаются одинаковые добавочные активные 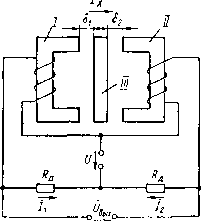 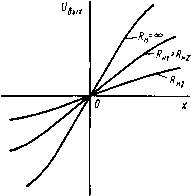 Рис. 11.15. Мостовая схема индуктивного преобразователя Рис. 11.16. Характеристики мостовой схемы индуктивного преобразователя сопротивления /?д. Напряжение питания подается на одну диагональ моста, а выходное напряжение снимается с другой диагонали. Выходное напряжение преобразователя /вь.х = (А-/2)/?д. В режиме без нагрузки Л -0/(R,-Ь/?об-f МгУ, /2-0HR, + R + Тогда выходное напряжение 0,,=JUR,a2-Li)/(R,+R6+J»Li)(R, + Ro6+M2)-При перемещении якоря изменяется разность L2-L,, а знаменатель дроби остается примерно постоянным. Выходное напряжение в мостовой схеме, так же как и в дифференциальной, при изменении направления перемещения якоря изменяет фазу на 180° (рис. 11.16). iBbix>0 при д;>0 для принятых на рис. 11.15 положительных направлений. В нагрузочном режиме при Rn¥=oo выходная характеристика идет аналогичным образом, но несколько ниже, так как при этом увеличивается падение напряжения на сопротивлениях обмоток. При этом чем меньше /?„, тем ниже проходит выходная характеристика. В третьем квадранте фаза сигнала изменяется на противоположную. Реверсивные индуктивные преобразователи по сравнению с нереверсивными имеют следующие преимущества: линейная часть выходной характеристики имеет большую протяженность; электромагнитное усилие, действующее на якорь, значительно меньше, чем усилия в нереверсивном преобразователе. Это объясняется частичной компенсацией электромагнитных усилий, действующих со стороны неподвижных сердечников. Полная компенсация происходит в нейтральном положении. Индуктивные преобразователи позволяют измерять перемещение от нескольких микрометров до десятков миллиметров. Основным недостатком индуктивных преобразователей является наличие гальванической связи выходной цепи с цепью питания, что затрудняет включение нескольких преобразователей для выполнения счетно-решающих операций без применения каких-либо промежуточных элементов. Из-за электрической и магнитной асимметрии нейтральное геометрическое положение не соответствует действительному нейтральному положению. Реверсивные преобразователи имеют остаточное напряжение, которое содержит синфазную и квадратурную составляющие, а также высшие гармоники. Синфазную составляющую можно свести к нулю перемещением якоря в ту или иную сторону. Квадратурная и высшие гармонические составляющие перемещением якоря не компенсируются, поэтому при любом положении якоря выходное напряжение преобразователя не равно нулю. Начало отсчета определяют при минимальном (/вых- Зубчатые индуктивные преобразователи. Для точного измерения больших перемещений, например в металлорежущих станках, применяются линейные и круговые индуктивные преобразователи с зубчатыми сердечниками. Такие преобразователи имеют периодическую характеристику и позволяют измерять приращение вход-;ной величины, т. е. линейное или угловое перемещение, путем счета периодов изменения выходного сигнала в процессе движения подвижной части. Кроме того, для получения более точного отсчета можно использовать выходную характеристику в пределах одного периода. Принципиальная схема такого преобразователя приведена на рис. 11.17. Магнитопровод / имеет зубчатые полюса. На магнитопроводе расположена обмотка 2. Зубчатый якорь 3, связанный с •999 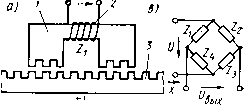 Рис. 11.17. Зубчатый индуктивный преобразователь подвижной частью устройства, перемещается в горизонтальном направлении относительно неподвижного магнитопровода /. При перемещении якоря индуктивность обмотки меняется периодически от Lmax до Lmin И соответственно меняется полное электрическое сопротивление обмотки от Zmax ДО Zmin (рис. 11.17,6). Максимальная индуктивность соответствует расположению зубцов якоря против зубцов магнитопровода, а минимальная - против впадин. Обмотка включается, например, в одно из плеч мостовой у схемы (рис. 11.17, в), которая уравновешивается при Zi=Zcp. На выходе мостовой схемы образуется выходной сигнал, близкий к синусоидальному (рис. 11.17, г). По количеству полных периодов можно грубо вычислить перемещение якоря, определив по геометрическим размерам перемещение, соответствующее одному периоду. Точно перемещение якоря можно определить, используя дополнительно выходную характеристику преобразователя в пределах последнего периода. Для повышения чувствительности индуктивного преобразователя применяют две одинаковые магнитные системы, сдвинутые на ширину зубца одна относительно другой. Обмотки включают в два плеча Zi и Z2 мостовой схемы (рис. 11.17, в). При этом если Zi растет, то Z2 падает, и наоборот. Одновременное изменение Zi и Z2 приводит к увеличению чувствительности. Индуктивные преобразователи с подвижными экранами измеряют механические перемещения. При подобном перемещении X экрана в таких преобразователях меняется эквивалентное удельное реактивное сопротивление немагнитного зазора и, следовательно, индуктивное и полное сопротивление обмотки. Принципиальная схема индуктивного преобразователя с одной обмоткой возбуждения показана на рис. 11.18, а. На магнитопроводе / расположена обмотка 2, включенная последовательно с сопротивлением нагрузки под напряжение питания. Экран 3, жестко связанный с подвижной частью устройства, охватывает верхнюю часть магнитопровода. В зависимости от положения экрана меняется реактивное сопротивление немагнитного зазора, индуктивность обмотки и соответственно ток /, протекающий через сопротивление нагрузки Rn. Характеристика управления индуктивного преобразователя с одной обмоткой приведена на [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [ 36 ] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] 0.0119 |