
|
|
|
Главная страница Магнитные цепи [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [ 35 ] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] сопротивления нашли применение проводниковые терморезисторы, которые изготовляются из химически чистых платины, меди, никеля и железа. Наиболее широко применяются платина и медь. Зависимость сопротивления от температуры для металлов с некоторым приближением имеет вид /?=/?o(l-fae), где Ro - сопротивление проводника при температуре 0°С; в - превышение температуры проводника относительно 0°С; а -температурный коэффициент, зависящий от свойств проводника. Терморезисторы из медного проводника могут работать при температурах -50ч-+180°С. Для изготовления терморезисторов из проводниковых материалов наиболее пригодны металлы: платина, медь, никель. С целью повышения чувствительности следует применять металлы с большим температурным коэффициентом сопротивления. Конструктивно терморезистор представляет собой бифиляриую обмотку из тонкой проволоки, размещенную на изоляционном каркасе, что и составляет чувствительный элемент, который вставляется в специальный чехол с выводами. Характеристики управления проволочных медных терморезисторов практически линейны во всем рабочем диапазоне, а характеристики платиновых терморезисторов обладают заметной нелинейностью, особенно при большом температурном диапазоне. Влияние нелинейности характеристики учитывается с помощью градуиро-вочных кривых. Чувствительность проволочных медных терморезисторов На точность работы терморезисторов влияют изменения свойств материала со временем, нестабильность сопротивления токопод-водящих проводов, дополнительный нагрев терморезисторов при прохождении по ним тока. Погрешность измерений у терморезисторов составляет 0,5-1%. Терморезисторы, изготовленные из полупроводниковых материалов, называются термисторами. В качестве материала для терми-сторов используют окислы металлов -марганца, меди, железа, никеля, кобальта и других, которые спекают при высокой температуре. Образующиеся оксиды, карбиды, сульфиды металлов обладают отрицательным температурным коэффициентом сопротивления, что характерно для полупроводников. Сопротивление термистора уменьшается с повышением температуры по экспоненциальному закону: /?,=/?,е-«=/?о(1-ав+-...), где Ro - сопротивление термистора при температуре 0°С; а -температурный коэффициент сопротивления термистора; обычно а = П \8 Л О, 0,6 D,k 0,2 О 20 ¥1 60 80 в, С 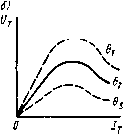 Рис. 11.6. Характеристики термистора температурная (а), вольт-амперная (б) = (0,03-f-0,06) град-; в -превышение температуры термистора относительно температуры 0°С. Характеристики термистора нелинейны. Основными из них являются зависимость сопротивления термистора от температуры и вольт-амперные характеристики (рис. 11.6,а,б). Конструктивно термисторы представляют собой тело дисковой, шаровой или других форм с металлическими выводами. Для защиты от влаги рабочее тело покрывают слоем лака или стекла, а иногда его помещают в герметически закрытый стеклянный баллон или металлический корпус. Чувствительность термисторов в S-30 раз больше, чем чувствительность терморезисторов, однако линейность характеристик обусловливает использование термисторов в узком температурном диапазоне. Термисторы находят также применение для ограничения пускового тока электродвигателей, бареттеров и мощных ламп накаливания. В момент пуска сопротивление термистора велико, а затем оно падает при нагревании термистора. Магниторезисторы предназначены для измерения индукции магнитного поля. Под названием эффект магнитосопротивления (или эффект Гаусса) подразумевают наличие зависимости удельного сопротивления полупроводника от магнитного поля. Первое упоминание о практическом использовании явления Гаусса относится к 1887 г., когда Ледюк предложил использовать это явление для измерения магиитной индукции [47]. В последние годы явление магнитосопротивления стало привлекать к себе повышенное внимание. Новые материалы, такие, как арсенид индия и аитимонид индия (InAs и InSb), позволили значительно расширить диапазон применения маг-ниторезисторов. Это объясняется тем, что магниторезистор представляет собой резистор, активное сопротивление которого легко управляется сигналом, гальванически ие связанным с этим резистором. Большинство магниторезисторов имеет начальное сопротивление порядка 0,1-0,2 Ом, однако имеются магниторезисторы, начальное сопротивление которых составляет несколько десятков Ом. Основной характеристикой магниторезистора является зависимость его сопротивления от индукции магнитного поля R = f{B). На рис. 11.7 приведена характеристика магниторезистора, выполиенно- го из InSb. В интервале малых индукций зта характеристика нелинейна, а при больших значениях индукций практически линейна. В слабых полях до индукции 0,3-0,5 Тл зависимость сопротивления магниторезистора от индукции квадратичная: где i?s -значение активного сопротивления при индукции В; Ro - значение активного сопротивления при индукции В = 0; а - коэффициент пропорциональности. При больших индукциях зависимость становится линейной, а именно: Яв-=ЬВ± Ro. Здесь b - коэффициент пропорциональности; Ro - значение сопротивления на оси ординат, соответствующее продолжению прямой линии. 20 15 10 5 О 0,5 1 1,5 2 В,Т/! -о и г Рис. 11.7. Характеристика маг- Рис. 11.8. Схема умножающего устрой- ниторезистора ства на магниторезисторах Квадратичная зависимость создает при некоторых применениях большие затруднения, поэтому используют поле предварительного смещения с индукцией 0,3-0,5 Тл. Схема умножающего устройства на основе магниторезистора приведена на рис. П.8. Эта схема устраняет нелинейность магниторезистора при слабых полях и позволяет производить умножение трех токов: Ii, /2 и /3. Схема представляет собой мост, в два плеча которого включены магниторезисторы Ri н R2 с одинаковыми свойствами, а в два другие плеча включены одинаковые сопротивления /?з, значительно большие, чем сопротивление магниторезистора. Каждый магниторезистор помещен в зазоре магнитной системы с двумя обмотками, навитыми на магнитопровод и подсоединенными, как показано на рис. П.8. Оба сердечника и обмотки на них идентичны, различие только в подсоединении обмоток W2. В результате магниторезистор Ri находится под действием суммы потоков, создающих в зазоре индукции В, и Вг. а R2 - под действием их разности (Bl-В2). Тогда соответственно Ri=Ro+a (Bl -(- Bj)2; =/?о+а (В - B) Предполагая, что сердечники далеки от насыщения, а их магнитные сопротивления пренебрежимо малы относительно магнитных сопротивлений зазоров, можно считать, что В, и Вг пропорциональны Il и /2. При пропускании тока через оба магниторезистора на зажимах магниторезисторов возникает напряжение вых=(/з-/з)/?з~/з(/?1-/?2)=4аВ1В2/з или U.,=kIJJ, где k - коэффициент пропорциональности; IsUz/Rj. § 11.2. Емкостные преобразоватепи Емкостные преобразователи служат для измерения перемещений, размеров деталей, уровня жидкости и т. п. Емкостные преобразователи нашли широкое применение в различных схемах автоматики и в измерительных приборах благодаря ряду достоинств высокой чувствительности, малым габаритам и массе, простой технологии изготовления. Их недостатки - необходимость усиления выходного сигнала и защиты от влияния паразитных емкостей. Принцип действия емкостных преобразователей основан на изменении емкости конденсатора под воздействием преобразуемой величины. На рис. 11.9 схематически изображено устройство емкостных преобразователей и приведены графики изменения их емкости при изменении площади перекрытия пластин в результате смещения одной пластины конденсатора относительно другой (рис. 11.9,а); при изменении диэлектрической проницаемости среды (рис. 11.9,6); при изменении воздушного зазора между пластинами конденсатора (рис. 11.9,в). В первом и во втором случаях изменение емкости в зависимости от перемещения близко к линейному, а в третьем - к гиперболическому. В емкостных преобразователях измеряется неэлектрическая величина, функционально связанная с параметрами конденсатора. Преобразователи с изменением величины воздушного зазора и пло- 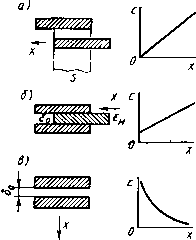 Рнс. 11.9. Устройство емкостных преобразователей щади перекрытия обычно измеряют линейные и угловые перемещения, размеры деталей, а преобразователи с изменением диэлектрической проницаемости - уровни непроводящих жидкостей. Емкостный преобразователь конструктивно представляет собой плоскопараллельный или цилиндрический конденсатор переменной емкости. Одна из пластин конденсатора неподвижна и механически соединяется с корпусом контролируемого устройства, а вторая подвижна и соединяется с деталью, перемещение которой измеряется. Емкостный преобразователь перемещения с изменяющимся воздушным зазором имеет характеристику управления, определяемую выражением где бо - начальный зазор; S - площадь пластины конденсатора. При этом чувствительность его ие постоянна и зависит от измеряемого перемещения: 5с=-е5/(8о+х)2. Такие преобразователи целесообразно применять в тех случаях, когда диапазон изменения контролируемой величины соответствует небольшому участку характеристики, поэтому они обычно используются для измерения относительно малых линейных перемещений (1 мм и меньше). Емкостный преобразователь перемещения с переменной площадью перекрытия имеет характеристику управления, описываемую выражением где а - ширина пластин конденсатора. На рис. 11.10 показано устройство емкостного преобразователя для измерения уровня жидких или сыпучих иеэлектропроводящих тел. Цилиндрический электрод / жестко соединен изоляционным кольцом 2 с полым цилиндром 3, который опускается на различные уровни в жидкость. Преобразователь состоит из двух параллельно соединенных конденсаторов: конденсатор С, образован частью электродов и диэлектриком - жидкостью, уровень которой измеряется, конденсатор Со -остальной частью электродов и диэлектриком - воздухом. Емкость преобразователя С = С, +Со- +(0- i) Sol 2л/1п , где El и ео - диэлектрическая проницаемость соответственно жидкости и воздуха; k, h, Ri и R2 показаны на рис. 11.10. Емкостный преобразователь с переменной площадью пластин изображен иа рис. 11.11, а. Такие преобразователи используются для измерения угла поворота вала. Ротор / поворачивается относительно статора 3 так, что длина зазора между ними сохраняется неизменной. Емкость преобразователя при повороте ротора изменяется от максимума (выступ ротора находится против выступа статора) до минимума, как показано на рис. 11.11,6. Достоинством емкостных преобразователей с переменной площадью перекрытия пластин является возможность соответствующим выбором формы 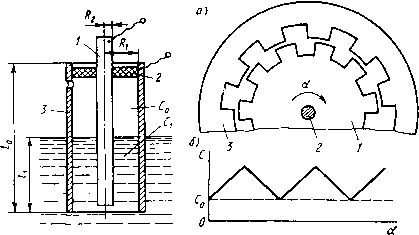 Рнс. 11.10. Емкостный преобразователь для измерения уровня Рис. 11.11. Емкостный преобразователь с переменной площадью перекрытия подвижной и неподвижной пластин получить заданную функциональную зависимость между изменением емкости и входным угловым или линейным перемещением. На работу емкостных преобразователей оказывают влияние колебания температуры и влажности окружающей среды. Для уменьшения температурной погрешности обкладки преобразователя выполняют из сплавов с малым температурным коэффициентом линейного расширения. Для устранения влияния влажности применяют герметизацию емкостных преобразователей. § 11.3. Индуктивные преобразователи Индуктивные преобразователи служат для измерения перемещений и сил. При создании индуктивных преобразователей используют изменение индуктивности, вызванное перемещением подвижной части. Индуктивные преобразователи имеют по сравнению с резисторными преобразователями существенные преимущества: большую надежность и значительно больший срок службы, так как в них отсутствуют скользящие контакты. К недостаткам индуктивных преобразователей следует отнести на- [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [ 35 ] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] 0.0129 |
||||||||||||||||||||||||||||||||||||