
|
|
|
Главная страница Магнитные цепи [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [ 33 ] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] Порогом чувствительности называется минимальнре значение входной величины, которая вызывает изменение выходной величины. Появление порога чувствительности вызывается как внешними, так и внутренними факторами (трение, люфты, гистерезис, внутренние шумы). § 10.2. Динамические характеристики первичных преобразователей Динамическими характеристиками ПП называются такие свойства, которые сказываются только при изменении измеряемой величины во времени. Обычно динамические характеристики рассматриваются как причина динамических погрешностей, однако иногда они используются в полезных целях: сглаживания, фильтрации, усреднения и т. д. Большинство ПП можно отнести к линейным средствам измерений непрерывного действия. Б таких ПП связь выходной величины y{t) с входной x{t) выражается дифференциальным уравнением (10.1), в котором символ дифференцирования p=d/dt: (ар"+а„,р- + ....\)у=Кф„р" + Ь„-,р»- +... +1) X, (10.1) где К - статическая чувствительность (коэффициент преобразования), т. е. чувствительность к входной величине, не изменяющейся во времени. При медленно меняющихся входных величинах уравнение (10.1) может быть представлено в виде y(t)=Kx(t). Например, таким уравнением определяется связь между входной и выходной величинами трансформаторного ПП при перемещении подвижной части с малой скоростью. При значительных скоростях кроме трансформаторной ЭДС появляется генераторная ЭДС, зависящая от скорости подвижной части ПП. В этом случае зависимость y(t) следует определять из уравнения (10.1). На практике решение уравнения (10.1) находится при определенных типовых воздействиях x{t) и начальных условиях у(0). Применяют следующие виды типовых воздействий: 1. Единичное ступенчатое воздействие, которое мгновенно возрастает от нуля до единицы и далее остается неизменным. Это воздействие математически выражается единичной ступенчатой функцией 1 (/): 1(0 = 0 при /<0; 1 при />0. 2. Воздействие, описываемое единичной импульсной функцией 6(0- Функция 6(0 представляет собой импульс бесконечно боль- шой амплитуды и бесконечно малой длительности, площадь которого равна 1: со при i!=0; Единичная импульсная функция может быть также представлена как скорость изменения во времени единичной функции: 3(0=dl(0/d. 3. Воздействие, описываемое гармонической функцией x=X„sin K + <Pi(<«)], где Xm -амплитуда входного сигнала; ы -угловая частота; ф1 ((!)) - начальная фаза. Реакция ПП на входную величину, имеющую вид единичной ступенчатой функции 1 (О, называется переходной характеристикой h(t) (рис. 10.2). Чем быстрее приближается переходная характеристика /2(0 к установившемуся значению, тем меньше инерциоииость ПП. Если нереходная характеристика хорошо аппроксимируется экспоиентой ft(0 = l-e~ то инерционность ПП можно характеризовать постоянной времени т. Зная постоянную времени, можно 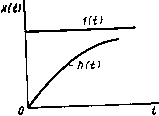 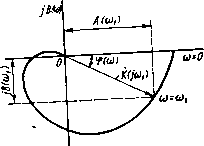 Рис. 10.2. Переходная характеристика Рнс. 10.3. Амплитудно-фазовая характеристика преобразователя определить время, необходимое для приближения переходного процесса к установившемуся значению с любой заданной точностью. Отметим, что если ПП характеризуется постоянной времени, то это указывает на то, что его рассматривают как апериодическое звеио. Реакция ПП на воздействие единичной импульсной функции 6(О называется импульсной характеристикой. Переходная и импульсная характеристики связаны между собой. Импульсная характеристика равна производной от переходной характеристики W{t)=dh{t)/dt. Чем быстрее затухает импульсная характеристика, тем меньше инерционность ПП. Воздействие в ви- де короткого импульса единичной площади характерно для ПП, предназначенных для измерения ударных ускорений. Реакция ПП на гармоническое воздействие. Если на вход ПП подать гармоническое воздействие x=XmS\n[(xit-\-+ (fi{(o)], то в установившемся режиме выходная величина будет изменяться по гармоническому закону с той же частотой, которую имеет входная величина, но с другими амплитудой н фазой; f/ = K„sin K+cpHI- Амплитуда и фаза выходного сигнала зависят от частоты возмущающего воздействия. По их изменениям в зависимости от частоты можно судить о динамических свойствах ПП. Как правило, вследствие инерционности выходной сигнал отстает по фазе от входного тем больше, чем выше частота воздействия. Это отставание приводит к убыванию амплитуды, так как выходной сигнал еще не успевает возрасти, когда входной уже начинает уменьшаться. Поэтому отношение К{(>)) = Ym/Xm всегда затухает с ростом частоты (О. При разных значениях ы отношение амплитуд К((о) выходного Ym и входного Хт колсбаний, а также разность фаз <p((i)) = = ф2((о)-ф1((о) имеют разные значения. Связь между параметрами входного и выходного колебания при разных частотах описывается амплитудно-фазовой частотной функцией или комплексным коэффициентом передачи: К (;«))=а: (ш) еХ")=Л (ш) -f jB (со). (10.2) где Л(©) и В((о) - соответственно вещественная и мнимая частотные функции. Прн графическом построении функции 7<(/(о) в комплексной плоскости в зависимости от изменения ш (например, от О до с») конец вектора /((/(о) описывает на комплексной плоскости некоторую кривую (годограф), являющуюся амплитудно-фазовой характеристикой. На рис. 10.3 приведен один из видов характеристики K(jix>). Вектор, проведенный из начала координат в какую-либо точку характеристики, определяет амплитуду и фазу, комплексного коэффициента передачи при соответствующей частоте, например /(((Ol) и ф(0)1). Амплитудно-фазовая характеристика объединяет амплитудно-частотную и фазочастотную характеристики. функция /С((й) = I/((/ш) I является амплитудно-частотной характеристикой ПЛ. В соответствии с (10.2) К (ш)=УА(ш)-\-В(ш). Амплитудно-частотная характеристика показывает изменение отношения амплитуд выходного и входного сигналов в зависимости от частоты входных гармонических колебаний. функция ф(о)), представляющая собой разность фаз выходного и входного колебаний, является фазочастотной характеристикой: ср (0))=arctg 5 (<й)/Л (<й). Графическое построение функций /((ш) и ф((й) удобно выполнять в виде логарифмических частотных характеристик. Если прологарифмировать выражение (10.2), то получим зависимость 1п К (;">)= In К (")) + у> (о)), состоящую из вещественной и мнимой частей, каждую из которых можно представить в виде функции логарифма частоты. Вместо 1п/С((о) обычно рассматривают функцию L((u) =201g/(((o), графическое изображение которой в логарифмическом масштабе частот называется логарифмической амплитудно-частотной характеристикой, функция ф(ш), построенная в логарифмическом масштабе частот, называется логарифмической фазочастотной характеристикой. При воздействии на ПП сигнала произвольной формы его можно разложить с помощью ряда Фурье на простые гармонические составляющие и получить результат общего воздействия как сумму воздействий от отдельных составляющих. Выявление динамических свойств преобразователей облегчается в случае представления их типовыми звеньями, которое основано на идентичности линейных дифференциальных уравнений, описывающих процессы в различных элементах. Типовое звено обладает направленным (детектирующим) свойством, т. е. пропускает управляющее воздействие только в одном направлении: от входа к выходу. Дифференциальные уравнения типовых линейных звеньев можно составлять независимо от других звеньев, поскольку при однонаправленности действия подключение последующего звена не оказывает обратного действия на предыдущее звено. Для подавляющего большинства систем автоматического регулирования и управления различают следующие основные типовые звенья: апериодическое, колебательное, интегрирующее, дифференцирующее, усилительное и звено с запаздыванием. Следует отметить, что один и тот же элемент или комбинация из нескольких элементов может относиться к различным типовым звеньям в зависимости от того, какие физические величины приняты за входной и выходной сигналы. § 10.}. Погрешности первичных преобразователей Качество передачи информации ПП принято характеризовать не их точностью, а размером допущенных погрешностей. Погрешности ПП классифицируются на разновидности по целому ряду признаков. Методические н инструментальные погрешности. Методические погрешности определяют приближенный характер метода измере- НИИ. Например, прямо пропорциональной зависимостью y=kx можно считать лишь при постоянном значении к. Если же коэффициент k даже незначительно изменяется при воздействии каких-либо факторов, то зависимость y=kx можно считать линейной с некоторой погрешностью. Инструментальные погрешности образуются из-за недостаточной точности изготовления деталей и сборки ПП. Величина инструментальных погрешностей зависит от класса точности изготовления, наличия трения и люфтов в опорах и от других причин. Инструментальные погрешности иногда называют технологическими. Основная н дополнительная погрешности. Как правило, ПП работают в сложных, изменяющихся во времени условиях, поэтому выходной сигнал ПП зависит не только от входной величины, но и от ряда эксплуатационных факторов (температуры, атмосферного давления, вибраций, напряжения питания и др.). При аттестации ПП создаются условия, обеспечивающие изменение влияющих величин в узких пределах. Такие оговоренные в технической документации условия называются нормальными. Суммарная результирующая погрешность, возникающая в нормальных условиях, называется основной погрешностью. Погрешности, образующиеся при отклонении условий эксплуатации от нормальных, называются дополнительными. Систематические, прогрессирующие и случайные погрешности. Систематическими называются погрешности, неизменяющиеся с течением времени. Систематические погрешности могут иметь постоянное значение или быть функциями некоторых величин (напряжения, температуры и т. п.), ие изменяющихся во времени. Примером постоянной систематической погрешности является неточная установка начального (нулевого) положения подвижной части ПП относительно неподвижной. Эта погрешность устраняется при повторной аттестации ПП. Примером второго вида систематических погрешностей служит большинство дополнительных погрешностей. Они могут быть скомпенсированы введением соответствующих конструктивных или схемных элементов. Прогрессирующими называются погрешности, медленно изменяющиеся с течением времени. Эти погрешности, как правило, вызываются процессами старения деталей аппаратов (старение резисторов, конденсаторов, постоянных магнитов, деформация механических деталей и т. п.). Прогрессирующие погрешности могут быть скомпенсированы лишь в данный момент времени, а далее они вновь монотонно возрастают. Случайными называются погрешности, не определенные по своей величине и не имеющие закономерного появления. Случайные погрешности обусловливаются стационарным случайным процессом, поэтому эти погрешности характеризуют законом распределения нх вероятностей. 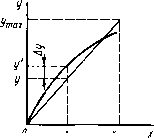 Рнс. 10.4. Характеристики измерительных преобразователей Абсолютная, относительная и приведенная погрешности. Абсолютной погрешностью называется разность между полученным значением выходной величины у и расчетным (номинальным) ее значением у (рис. 10.4): Ау=у-у. Абсолютная погрешность не служит мерой точности. Точность преобразования характеризуется относительной погрешностью. Относительной погрешностью уо называется отношение абсолютной погрешно-ности Ау к расчетному значению выходной величины у. Обычно относительная погрешность выражается в процентах: Yo = Ai/-100/t/. Текущее значение относительной погрешности не остается постоянным, а растет с уменьшением х и при х-*-0 оно стремится к бесконечности. Вследствие этого вводится понятие приведенной погрешности. Приведенной погрешностью уп называется отношение абсолютной погрешности к наибольшему значению выходной величины. Приведенная погрешность выражается в процентах: у„=Ау-100/ут. ГЛАВА 11. ПЕРВИЧНЫЕ ПАРАМЕТРИЧЕСКИЕ ПРЕОВРАЗОВАТЕЛИ Применяемые в технике ППП построены на основе различных принципов действия. Широкое применение в настоящее время нашли резисторные, емкостные, индуктивные и трансформаторные ППП. В зависимости от вида входной величины резисторные ППП делят на потенциометрические, тензорезисторы, терморезисторы и маг-ниторезисторы. Входной величиной емкостных ППП является перемещение, уровень неэлектропроводной жидкости и диэлектрическая проницаемость среды между пластинами конденсатора. Индуктивные ППП можно разделить на ППП с изменяющимся сопротивлением немагнитного зазора и с изменяющейся магнитной проницаемостью магиитопровода. Прн этом сопротивление немагнитного зазора может изменяться или за счет перемещения ферромагнитной детали, или при перемещении в зазоре короткозамкиутого витка (КЗВ). В трансформаторных ППП меняется магнитная связь (взаимоиндуктивиость) между первичной и вторичной обмотками или при перемещении подвижной части преобразователя, илн при изменении под действием силы магнитной проницаемости магиитопровода. Последние называются магнитоупругими преобразователями. Подвижными элементами трансформаторного ППП могут быть ферромагнитная деталь, КЗВ или обмотка. [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [ 33 ] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] 0.0116 |