
|
|
|
Главная страница Магнитные цепи [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [ 32 ] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] образом, что срабатывание или возврат феррида происходит только при одновременном воздействии двух обмоток, перемагничивающих ЭМП в одинаковом направлении. Примером аддитивного управления является схема параллельного феррида (рис. 9.П), в котором на одной (перемагничиваемой) половине / ЭМП расположены обмотки двух цепей (хну), а вторая представляет собой постоянный магнит 2. Для перемены состояния МК требуется изменить полярность импульсов. Аддитивный способ относительно прост, однако имеет ряд недостатков [43]. Наиболее существенный из них - необходимость достаточно точной стабилизации амплитуды импульсов тока. При дифференциальном управлении каждая из цепей х или у (колонка или ряд) коммутационной матрицы в точке коммутации имеет две обмотки (рис. 9.12): основную с числом витков kw (где к>1) и дополнительную с числом витков w. Основные и дополнительные обмотки цепей хну размещаются на разных частях ЭМП. Дополнительная обмотка цепи х размещается на участке расположения основной обмотки цепи у, а до- 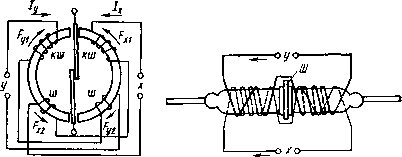 Рис. 9.12. Параллельный феррид с дифференциальным управлением Рис. 9.13. Расположение дифференциальных обмоток на гезаконе полнительная обмотка цепи у - на участке расположения основной обмотки цепи х. Дополнительная обмотка одной цепи включается встречно основной обмотке другой цепи, в чем и заключается принцип дифференциального управления. Число витков дополнительной обмотки и ток через нее должны быть такими, чтобы МДС, создаваемая этой обмоткой, не была меньше значения, необходимого для перемагничивання соответствующей части ЭМП по полной петле гистерезиса. При возбуждении обеих пар обмоток каждая из дифференциальных МДС [(Fi-Fy2) - {klx-Iy)w] или [{Fyi-Fx2) = (kly-Ix)w] также должна быть достаточной для перемагничивання ЭМП по полной петле гистерезиса. Для срабатывания устройства (рис. 9.12) импульсы тока, равные по значению и совпадающие во времени, должны быть поданы в обе цепи и иметь такую полярность, чтобы дифференциальные МДС создавали в двух частях ЭМП магнитные потоки, направленные встречно. Возврат происходит при подаче импульса в одну цепь. Для магнитного потока в этом случае создается последовательный магнитный контур по частям ЭМП, и МК размыкается. Возврат феррида по схеме рис. 9.12 можно осуществить и подачей импульсов в обе цепи, но и в этом случае необходимо изменить полярность импульса в одной из них. Дифференциальное управление можно реализовать и в последовательных ферридах, например в ферриде на гезаконе (рнс. 9.13). Второй описанный способ управления не требует стабилизации амплитуд импульсов тока в направлении их увеличения по сравнению с аддитивным способом, если изменения токов в цепях происходят одинаково и в одном и том же направлении. Это определяет возможность форсирования процесса перемагничивания. Выбор максимальных амплитуд импульсов при дифференциальном управлении ограничивается энергетическими соображениями, нагревом обмоток, а также электромагнитным влиянием ферридов друг на друга в матрице. По сравнению с аддитивным дифференциальный способ требует большей мощности управления. При способе безгистерезисного намагничивания в одну из обмоток (например, цепь у) подается импульс постоянного тока, а во вторую (например, цепь х) - серия знакопеременных затухающих до нуля импульсов, причем начальная амплитуда последних должна быть достаточной для насыщения ферромагнетика. В нашем случае таким ферромагнетиком является ЭМП. Затухание знакопеременных импульсов осуществляется до прекращения импульса постоянного тока. 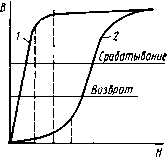 1 мопг Рис. 9.14. Безгистерезисное управление ферридом 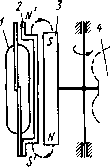 Рис. 9.15. Поворотный переключатель с ферридами На рис. 9.14 изображена безгистерезисная (7) и основная (2) кривые намагничивания. Значение напряженности магнитного поля Пг, при котором практически начинается намагничивание по основной кривой, значительно превышает значение напряженности поля и и при котором практически заканчивается намагничивание по безгистерезисиой кривой. Таким образом, если за номинальное значение импульса постоянного магнитного поля принять Няо» (цепь у) и ограничить возможные изменения напряженности этого поля величинами Н\ и Яг, то срабатывание феррида не будет происходить при возбуждении только обмотки цепи у. Возврат осуществляется при размагничивании ЭМП за счет воздействия только знакопеременных затухающих импульсов. В матрице феррид срабатывает при одновременном возбуждении обеих его цепей; ферриды, на которые действует только постоянное поле (цепь у), сохранят свое предшествующее состояние срабатывания или возврата, а ферриды, которые подвержены действию только переменного затухающего поля (цепь х), будут находиться в состоянии возврата. Достоинством безгистерезисиого способа намагничивания является большая надежность возврата ферридов, так как их ЭМП размагничиваются. Управление ферридами с помощью постоянных магнитов. В качестве примера рассмотрим поворотный переключатель (рис. 9.15), в котором параллельно МК 1, расположенным по образующим цилиндра, установлены ЭМП 2, перемагничиваемые вращающимися постоянными магнитами 3 п 4. При прохождении магнита 3 мимо какого-либо из ЭМП 2 последний намагничивается и, имея на своих концах магнитные полюса разной полярности {N н S), замыкает расположенный рядом с ним МК /. При прохождении магнита 4 мимо какого-либо из ЭМП 2 последний перемагничива-ется и приобретает на своих концах магнитные полюса одинаковой полярности (Л"), в результате соотвествующий МК размыкается. 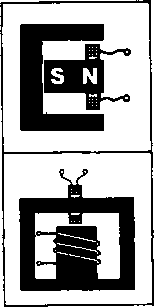 Раздел четвертый Первичные измерительные преобразователи В различных системах автоматики, телемеханики и информационно-измерительной техники возникает необходимость преобразования одной физической величины в другую. Такие функции наряду с другими выполняют измерительные преобразователи. Во всей совокупности измерительных преобразователей, используемых в общепромышленных устройствах, значительную часть составляют те из них, у которых входная величина связана с движением. Измерительным преобразователем называется средство измерений, предназначенное для выработки сигнала измерительной информации в форме, удобной для передачи, дальнейшего преобразования, обработки или хранения, но не поддающейся непосредственному восприятию наблюдателем. Первычным преобразователем называется измерительный преобразователь, к которому подведена измеряемая величина, т. е. первый в измерительной цепи. Первичные преобразователи разделяют на параметрические (пассивные) и генераторные (активные). В первичных параметрических преобразователях (ППП) энергия выходного сигнала обеспечивается только за счет энергии входного сигнала и, следовательно, мощность выходного сигнала всегда меньше мощности входного сигнала. ППП могут обеспечить лишь увеличение интенсивности передаваемых сигналов. В первичных генераторных преобразователях (ПГП) может быть дополнительный источник энергии. При этом входной сигнал лишь управляет передачей энергии источника. ППП обычно преобразуют неэлектрические входные величины (перемещение, скорость, давление) в параметры электрических цепей (сопротивление R, индуктивность L, емкость С, взаимную индуктивность М) и затем в напряжение, ток или частоту. В соответствии с видом переменного параметра их подразделяют на рези-сторные, индуктивные, емкостные, трансформаторные. Для таких элементов необходимы электрические источники питания. ПГП преобразуют неэлектрические величины (скорость, температуру, силу) непосредственно в электрическую величину: напряжение илн ток. К ПГП относятся индукционные, пьезоэлектрические, термоэлектрические и преобразователи на основе эффекта Холла. В настоящее время термин «измерительный преобразователь» применяется достаточно широко. В данной книге рассматриваются измерительные преобразователи, выполненные на основе определенного физического принципа: индуктивные, емкостные, трансформаторные, пьезоэлектрические и др. Совокупность измерительных преобразователей, объединенных в один конструктивный узел, выносимый на объект измерения, называется датчиком. ГЛАВА 10. ОСНОВНЫЕ ОПРЕДЕЛЕНИЯ, ХАРАКТЕРИСТИКИ И ПАРАМЕТРЫ ПЕРВИЧНЫХ ПРЕОБРАЗОВАТЕЛЕЙ Объект измерения характеризуется множеством физических величин, каждая из которых может быть измерена в отдельности, но в реальных условиях действующих совместно. Первичный преобразователь (ПП) позволяет получить информацию обычно об одной измеряемой величине. Свойства ПП определяются их характеристиками. § 10.1. Статические характеристики и параметры первичных преобразователей Функционная связь между измеряемой х и выходной у величинами, выраженная для установившегося режима, называется статической характеристикой у=\{х). В литературных источниках кроме термина статическая характеристика употребляется термин характеристика управления. Статические характеристики реальных ПП в основном нелинейные. Нелинейность характеристик обусловлена физическими свойствами ПП: наличием в них насыщения, зоны нечувствительности, неоднородности магнитного поля и т. п. Статическая характеристика (рис. 10.1) ограничивается нижними (Хт\п, утш) и верхними (Хтау., I/max) првдсльными значсниями входной U выходной всли-чин. По статической характеристике могут быть определены сле-198 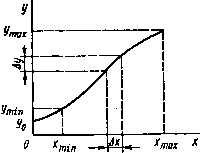 дующие параметры ПП: чувствительность, коэффициент преобразования, нелинейность, остаточный сигнал, порог чувствительности, ширина петли неоднозначности. Чувствительностью первичного преобразователя называется предел отношения приращений выходной и измеряемой величин. Для нелинейной статической характеристики чувствительность является функцией измеряемой величины. При линейной статической характеристике чувствительность имеет постоянное значение. Отношение значения выходной величины к соответствующему значению входной величины называется коэффициентом преобразования К=у/х. У ПП с линейной статической характеристикой чувствительность и коэффициент преобразования равны. Если величины л: и имеют размерность, то чувствительность и коэффициент преобразования будут также иметь размерность. Нелинейные статические характеристики ряда ПП можно с некоторым приближением заменить линейными. Погрешность от такой замены оценивается степенью нелинейности. Степенью нелинейности рассматриваемого участка статической характеристики называется отношение максимального отклонения ио ординатам характеристики от аппроксимирующей ее на этом участке прямой ко всему диапазону изменения ординаты на этом же участке. Степень нелинейности определяют, используя метод наименьших квадратов. При этом находится вспомогательная функция где /(л;) - исследуемая функция; й - коэффициент, равный тангенсу угла наклона аппроксимирующей прямой, значение коэффициента к, соответствующего наименьшей квадратичной погрешности линеаризации, находится из решения уравнения dY/dk=0. Статические характеристики ПП могут проходить или не проходить через начали координат. Если теоретически полученная характеристика проходит через начало координат, то практически при нулевой входной величине выходная величина уо (рис. 10.1) не равна нулю. Значение выходной величины ПП, соответствующее входной величине, равной нулю, называется остаточным сигналом. Остаточный сигнал отрицательно влияет на точность измерительного устройства, так как при этом в зоне малых значений х чувствительность ПП резко падает. Рис. 10.1. Непрерывная характеристика управления [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [ 32 ] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] 0.0116 |