
|
|
|
Главная страница Магнитные цепи [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [ 22 ] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] ки (примем это направление вращающего момента за положительное). Для следующего рассматриваемого момента (Ы=п/6), которому соответствует рис. 6.8, б, имеем: поток Фи равен нулю, ток iri достигает своего максимального отрицательного значения, поток Фг* увеличивается в положительном направлении, а ток i-r2 умень- 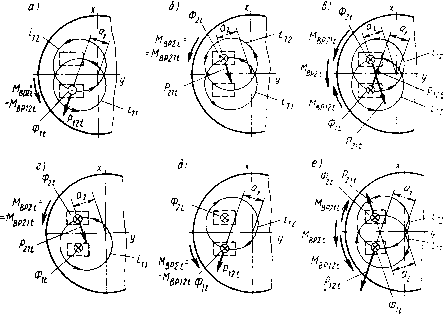 Рис. 6.8. Изменение направления магнитных потоков и токов трансформации в течение одного полупернода для двух одинаковых полюсов, симметрично расположенных относительно диска: а -прн at-O; б -прн at-nlB; в -прн «о-я/з; г -прн <й<-я/2; а -прн at~2nl3; е - прн <й*=5я/6 шается по модулю в отрицательном направлении (см. рис. 6.7). В результате мы получаем положительный вращающий момент ABp2i( = P2ua2 от взаимодействия потока Фг* с током (ть В третий рассматриваемый момент, при ti)i=n/3 (рис. 6.8, в), имеются два вращающих момента: положительный Мвр2и= = /21(02 -от взаимодействия потока Фг* с током iri и отрицательный MBp\2t=Pi2tai - от взаимодействия потока Ф с током It2, причем P2it>\Pi2t\, так как в этот момент поток Фг* и ток iVi соответственно больше потока Фи и тока ij2 (см. рис. 6.7). При 02 = 0, имеем iMBp2i<>iWBpi2<. Анализируя подобным образом все остальные случаи на рис. 6.8, приходим к выводу, что сдвинутые по фазе синусоидальные магнитные потоки двух одинаковых полюсов, симметрично расположен- ных относительно радиуса диска, создают на диске суммарный вра-щающий момент Мри, в любой момент времени направленный от полюса с опережающим потоком к полюсу с отстающим потоком (в нашем случае - от полюса с потоком Фг к полюсу с потоком Найдем теперь выражения для мгновенных и средних значении суммарного вращающего момента в конструкции, изображенной на рис. 6.4 в общем случае, когда полюса разные и углы ул и ут2 не равны нулю. Для мгновенных значений вращающих моментов Л1вр12* и Мвр2и, согласно закону Ампера, имеем Mi2t = kOiJr2m Sin »/-sin (со/+ <}.- 90-Уй)= = - *l*lmT2m sin coif • COS (ш/ + ф - Утг). (6-16) M,p2lt=22m/Tlm sin (со/+<»).sin (со/- 90 - Yti) = = -гФгтПт sin (со/+ф).С05(«)/-у.1). (6.17) где ki и кг - коэффициенты пропорциональности. Примем положительное направление суммарного вращающего момента совпадающим с положительным направлением момента Мвр12(. как показано на рис. 6.8, е. Тогда мгновенное значение суммарного момента с учетом (6.16) и (6.17) определится выражением Лвр£* = Л1врШ-Л1„р2и=-*1Ф1тт2т sin со/• COS (со/+ Ф" Утг) + + himlm sin (}t -f1)-cos (">/ - Yxi)- (618) среднее за период значение суммарного момента BPS- I j BP..d/= = Y 1*1»"т2т sin (1-Ут2) + *2Ф2тт1т sln (-Yxl)! (6.19) Знаки плюс перед составляющими выражения (6.19) при учете \3>Yti и i3>Yt2 свидетельствуют о том, что истинное направление среднего значения суммарного вращающего момента совпадает с принятым выше его положительным направлением, т. е. от полюса с опережающим потоком к полюсу с отстающим потоком. Амплитудные значения токов трансформации в выражениях (6.16) -(6.19) (6.20) /х2.=»>Фг„/,2=">Ф2« /К/г-Ьсог . (6.21) где Zti, Rt\, (oZ-ti - полное, активное и реактивное электрические сопротивления диска току in, а Zt2, /?т2, «тг - соответствующие сопротивления току It2. Если полюса одинаковы по размерам и расположены симметрично относительно оси у (рис. 6.8), то *1 = *2=*; т1=т2=т; Ln=L,2=W, (6.22) Yt1 = Yt2 = Yt- Тогда с учетом (6.18) -(6.22) имеем вра< = ЛГвря = [sin(4.--Yx)-fsin(]--Y,)], (6.23) т. е. в этом случае вращающий момент не имеет переменной составляющей. При допущении /,т=0 (ут=0) из (6.23) получаем вР8<=.Р5=(ЬФ1„Ф2„ sin (») ?,. (6.24) В ненасыщенной магнитной системе потоки примерно пропорциональны создающим их токам в обмотках. На рис. 6.4 оба потока определяются одним и тем же током /, поэтому при отсутствии насыщения из (6.24) следует i,Pi = /L (6 25) При неизменных значениях и, Ф,, Фг и -ф вращающий момент зависит от толщины и удельного электрического сопротивления диска, а также от так называемой геометрической постоянной индукционной системы, представляющей собой функцию от размеров 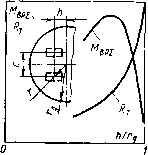 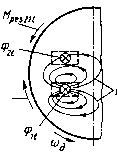 Рис. 6.9. Влияние смещения Рис. 6.10. Возникновение мо- полюсов относительно цен- ментов от токов резания тра диска на электрическое сопротивление диска токам трансформации н вращающий момент полюсов, их взаимного расположения и размещения относительно диска (рис. 6.9). Так, например, при перемещении полюсов от центра диска к его краю вращающий момент сначала растет, достигает максимального значения, а затем падает (рис. 6.9). Это связано с тем, что с удалением полюсов от центра диска растет электриче-136 ское сопротивление последнего на пути прохождения токов трансформации, но при этом увеличивается плечо приложения силы, возникающей от взаимодействия потоков Ф1 и Ф2 с этими токами. При вращении диска под действием Afapi в нем появляются ЭДС резания £рез1 и £рез2, обусловленные пересечением диском магнитных потоков 61 и 62. Направление этих ЭДС определяется правилом правой руки. В свою очередь ЭДС резания вызывают в диске токи резания /рез1 и /рез2, которые, согласно закону Ленца, препятствуют вращению диска. Рассмотрим этот процесс на примере пересечения диском потока Ф (рис. 6.10). Считая поле равномерным под полюсом, получим приближенное выражение для мгновенного значения ЭДС резания: ер,,г--,Ф1п.тЫ, (6.26) где г -удаление оси полюса от оси вращения диска (рис. 6.9); /п -средняя длина линии тока под полюсом; Sn - площадь поперечного сечения полюса; <0д -угловая скорость диска. Мгновенное значение тока резания "през! где Zpeai - полное электрическое сопротивление диска на пути прохождения тока /рез1- При допущении 7рез1=рез1 ток 1рез1 совпадает по фазе с потоком Ф]. На рис. 6.10 направление мгновенных значений потоков Фи и Ф2< показано от нас к диску, а вращение диска происходит против часовой стрелки, поэтому по правилу правой руки ток под полюсом с потоком Фи должен протекать слева направо. Момент, создаваемый взаимодействием потока Ф1/ с током ipeai, будет, согласно правилу левой руки, направлен по часовой стрелке (т. е. против суммарного вращающего момента), а его мгновенное значение при допущении совпадения по фазе потока Ф1 с током /рез1 (Урез1=0) равно реэ11< = *з">дФ1т51п»«)/, (6.28) где кз - коэффициент пропорциональности. Часть тока tpeai пройдет под соседним полюсом (рис. 6.10) и, взаимодействуя с потоком Фг*, создаст момент Мрезш, направленный против момента Мрезш- Мгновенное значение этого момента при урез1=0: рез2и = *4«»ФыФ2т sin (oZ-slfl (со/ -f ф). (6.29) Мгновенные значения аналогичных моментов: (6.30) (6.31) 137 рез22( = *5«Ф2т 51П» (ш/ -f ф); рез12/ = *6дФ1«Ф2« Sin 0)/.sin («)/--ф). Значение >Ирез21< <Л*рез11<, а значение iWpe3i2< •< Afpe322<i так как под полюсом с потоком Фг проходит незначительная часть тока резания, возникающего под полюсом с потоком <i>i, а под полюсом с потоком Ф] -- незначительная часть тока резания, возникающая под полюсом с потоком Фг- Мгновенное значение суммарного тормозного момента от токов резания, создаваемого магнитной системой на диск, ЛрезЕ< = рез11 + Л1рез22- Лрез21" Лрез12== = а[kMmSm + кф1т Sin {t + ср) -- (*4 + *б) ФхтФгт sin "> Slfl Ы -f Щ = = "д I *зФ1/п (1 - COS 2(00 -f кф\„ (1 - cos 2ф cos 2ш/ + -f sin 2ф si« 2(0/) -(*4 + *б) ФыФгг. [cos ф (1 - cos 2(о/) + --81Пф81п2«)/1/2. (6.32) Таким образом, суммарный тормозной момент от магнитной системы имеет переменную составляющую. Среднее значение этого момента М -- fpe3S<d/ = (6.34) Фп.м - магнитный = ")д (*зФ.т + *5Ф2т - (*4 + WS 1<1/2. (6.33) При одинаковых размерах полюсов и симметричном их расположении относительно диска в выражениях (6.32) и (6.33) имеем 3 = 5 И 4 = 6- В ряде случаев для ограничения скорости диска его край охватывают полюсами постояиного магнита (см. поз. 9 на рис. 6.4), тормозной момент которого на вращающийся диск от возникающих токов резаиия определяется выражением рез.п.м = Ап.м"дФп.«. где /Сп.м - коэффициент пропорциональности; поток между полюсами постоянного магнита. Так как вращающий момент в индукционных системах является функцией частоты, амплитудных значений СЬш и Фгт магнитных потоков, а также угла сдвига фаз между комплексными значениями последних [см. (6.24)], то эти системы могут быть использованы для создания различных по назначению реле: - реле частоты, если cu=var, а Ф,тФ2тsini()=const; - реле тока, если Ф1тФгш/т=уаг, а «=const и \j=const; - реле напряжения, если ф,тФ2т1/т=уаг, а (o=const и - = const; - реле активной мощности, если Ф,тФгт simj)=i cos<p=var (<р -угол между 1? и /), а (u=const; - реле реактивной мощности, если Ф1тФ2т sin if= UI sin ф=уаг, a <!) = const; - реле сопротивления - при реализации сложной схемы присоединения обмоток индукционной системы к сети [21, 23] с применением специальных трансформаторов тока (трансреакторов), имеющих воздушные зазоры в магнитной цепи. Индукционные системы с диском отличаются большими габаритами, невысокой чувствительностью и из-за значительного момента инерции подвижного элемента-относительно большим временем срабатывания, поэтому такие системы в настоящее время применяются только в реле тока серий РТ-80 и РТ-90 для реализаций зависимой от тока характеристики времени срабатывания. Указанные типы реле являются по своему принципу действия комбинированными: в них помимо индукционной системы с диском имеется электромагнитный элемент, реализующий «мгновенное» срабатывание (отсечку) при больших токах. Для создания более чувствительных и быстродействующих индукционных реле используются системы с подвижными цилиндрическим ротором, сектором или рамкой. В настоящее время распространение получили первые два вида этих реле. Индукционные реле с цилиндрическим ротором. В таких реле два магнитных потока (Ф1 и Фг) сдвинуты в пространстве на угол л/2 за счет применения специальной (четырехполюсной) конструкции магнитной системы / (рис. 6.11), а фазовый сдвиг между ни- 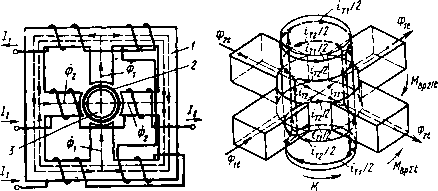 Рис. 6.!1. Иидукциоииая система с цилиндрическим ротором Рис. 6.12. Распределение токов трансформации в системе с цилиндрическим ротором МИ осуществляется определенным включением обмоток двух электрических цепей реле к внешней сети. Магнитные потоки индуктируют в стеиках цилиндрического алюминиевого ротора 2 токи, которые, взаимодействуя с магнитными потоками, создают момент, поворачивающий ротор. Внутри ротора 2 находится неподвижный [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [ 22 ] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] 0.013 |