
|
|
|
Главная страница Магнитные цепи [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [ 19 ] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] в состоянии II момент силы давления Pxi пружины Я на якорь уравновешивается моментом внешней силы Рвш, снимаюшей якорь с ограничителя оя: 8lII = «xin = TlW8- (5.6) При этом сила давления якоря иа ограничитель Poin = 0. Если, начиная с Pe,ii, увеличивать внешнюю силу Ры, то якорь начнет поворачиваться по часовой стрелке, занимая последовательно положения 2, 3 и 4. Положение 2 соответствует такому значению силы Рт2, при котором контакт-детали соприкасаются, но контактное нажатие Рк2 = 0. При этом положении происходит замыкание контакта при срабатывании реле и размыкание при возврате. В положении 3 (рис. 5.3, д) нижняя пружина действует на верхнюю по направлению К с такой силой Ркз, при которой последняя снимается с упора УП (Руз=0). При дальнейшем увеличении Рт, верхняя пружина оторвется от упора УП и будет изгибаться по всей своей длине. В конечном положении (положение 4, рабочий зазор б=б4=Дш, рис. 5.3, е) со стороны якоря на нижнюю пружину действует сила Рт4, а в контакт-деталях - сила конечного контакта нажатия Рк4. В этом положении 4 можно, как и в положении /, выделить два состояния. В состоянии I (рис. 5.3, ж) внешняя сила Рв41 создает момент, равный моменту силы Рт4 давления пружин на толкатель якоря: Рв41/й=Рт4/тц. Состояние II положения 4 (рис. 5.3,3) - текущее состояние. Оно отличается от состояния I лишь тем, что в состоянии II внешняя сила Рв41ь приложенная к якорю, больше силы Рб41. Момент, создаваемый силой Рь уравновешивается суммой моментов силы Рт4 и силы Рс4П давления на якорь со стороны сердечника: Рв41./в = Рт4/тц + Рс411/в. При увеличении Рв4п будет увеличиваться и Pc4ii. В состоянии I положения 4 сила давления сердечника на якорь Pc4i = 0. На рис. 5.3, и построена механическая характеристика рассмотренного реле. По оси абсцисс отложены значения длины рабочего зазора б.-, которые легко определить по изменениям рабочего зазора б,-.,+1. Последние связаны с соответствующими изменениями перемещений /т., .4-1 простой зависимостью 1,1+1=fTt,i+il,/hn, (5,7) где 1=1, 2, 3. Параметры точек механической характеристики соответствуют номеру положения и состояния механизма: точка /i -рис. 5.3, а, б; точка /ц -рис. 5.3, а, в; точка 2 -рис. 5.3, г; точка ,3 -рис. 5.3, d; точка "1 -рис. 5.3, е. ж; точка ц -рис. 5.3, е, з. При 6i на участке h-hi характеристики и при 64 на участке 4i-4n характеристики жесткость механизма реле равна бесконечности. Наименьшую жесткость механизм имеет на участке /,,-2: изгибается только одна пружина. На участке 3-4, жесткость больше, потому что изгибаются обе пружины. Еще большая жесткость - на участке 2- 3. На этом участке изгиб верхней пружины приближенно можно 116 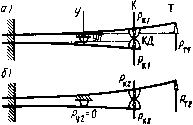 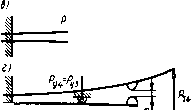 рассматривать как изгиб балки длиной /к-/у . заделанной левым концом в стенку, граница которой проходит по вертикали У. Так как жесткость балки обратно пропорциональна кубу ее длины - см. (5.3), то жесткость пружины В на участке 2-3 выше жесткости этой пружины на участке 3-4,. Изгиб нижней пружины на участке 2-3 проходит в тех же условиях, что и на участке 3- 4i, а значит, при той же жесткости. Механизмы размыкающего и переключающего контактов. В начальном положении (при максимальном зазоре электромагнита) механизм размыкающего контакта показан на рис. 5.4, а (положение /). Обе пружины имеют предварительный изгиб. Верхняя пружина находится под воздействием двух сил: по направлению Т на нее давит толкатель якоря с усилием Pti и по направлению К - нижняя пружина с усилием Ркь направленным вверх. В размыкающем контакте нижняя пружина создает силу, направленную в ту же сторону, что и сила, создаваемая электромагнитом (при наличии тока в обмотке). Нижняя пружина изогнута под действием направленной вниз силы Рк1 давления верхней пружины по направлению К- В начальном положении с упором УП она не соприкасается. На рис. 5.4, б показано положение пружин в момент соприкосновения нижней пружины с упором УП (положение 2), а на рис. 5.4 в положение 3, при котором контактное нажатие Ркз = 0 (в этом положении происходит размыкание контакта при срабатывании реле и замыкание при возврате). При дальнейшем уменьшении длины рабочего зазора электромагнита перемещается только верхняя пружина. При этом происходит увеличение расстояния между контакт-деталями до Др (положение 4, рис. 5.4, г). Механическая характеристика реле с рассмотренным размыкающим контактом приведена на рис. 5.4, д. Силы, действующие на якорь реле с таким контактом в состояниях I и II положений / и 4 показаны на рис. 5.3, б, в, ж, з. "их»! О 6, S Рис. 5.4. Размыкающий контакт Механизм переключающего контакта в начальном положении (при максимальном зазоре) показан на рис. 5.5,а, механическая характеристика -- на рис. 5.5, б. На участке 1\-1п- 2-3-4 она ничем не отличается от характеристики размыкающего контакта, а на участке 3-4-5-6\-- от характеристики замыкающего контакта. На 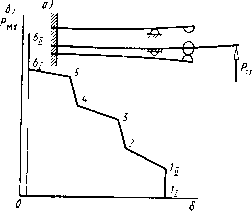 участке 3- -4 обе рассмат-цепи контакта Рис. 5.5. Переключающий контакт риваемые разомкнуты. Расчет механической характеристики замыкающего контакта (см. рис. 5.3). Считаем заданными: размеры поперечных сечений пружины; /к, /т, /у, тц, h, Др, Аш; материал пружин; силы Рк4/ Pv i - = Ру2. Ртх. Моменты инерции и жесткости пружин. Моменты инерции поперечных сечений пружин определяются по (5.4). Жесткости Снт и Снк пружины Н по направлениям Т и К, а также жесткости свк и с ву пружины В по направлениям К и У соответственно определяются по (5.3). Взаимная жесткость Свку=Свук пружины В между направлениями У и К определяется по (5.5), взаимная жесткость снтк=Снкт пружины Я между направлениями Т и К определяется по аналогичной формуле. Кривые изгиба пружин, обозначения перемещений. Кривые изгиба пружин приведены на рис. 5.6. Цифрами 1. 2, 3 а 4 обозначены пружины в положениях, которые соответствуют этим же положениям механизма на рис. 5.3, а, г, д, е. Перемещения пружин от нулевого положения обозначаются по направлению К (рис. 5.3 и 5.6) с индексами, включающими: обозначение пружин (Я -нижняя пружина, fi - верхняя пружина); направление, по которому ищется перемещение {К)\ номер положения {I, 2, 3 и 4), для которого ищется перемещение. Например, /нкз - перемещение по направлению К пружины Я от нулевого положения до 3-го. Так как по направлению Т перемещения ищутся только для пружины Я, индекс Я у перемещений по направлению Т опускаем. Например, /тз - перемещение пружины Я по направлению Т от нулевого положения до 3-го. Аналогично для пружины В по направлению У: /уз - перемещение пружины В по направлению У от нулевого положения до 3-го. Приращения перемещений по направлениям Т и К тоже не имеют в индексах обозначения пружины, потому что по направлению Т определяются приращения перемещений /т12, /тгз, hz* только для пружины Я, а по направлению К - приращения перемещений на участках от 2-го положения до 3-го (/кгз) и от 3-го до 4-го (/кз4) у пружин Я и В одинаковы (контакт-детали проходят эти промежутки замкнутыми). На участке от 1-го положения до 2-го перемещение по направлению К пружины Я равно раствору контакта Др. На рис. 5.6, а стрелками показаны и буквами обозначены внешние силы, приложенные к пружине В, а на рис. 5.6,6-внешние силы, приложенные к пружине Я. Расчет сил и перемещений. Расчет механической характеристики контакта рнс. 5.3 заключается в определении координат
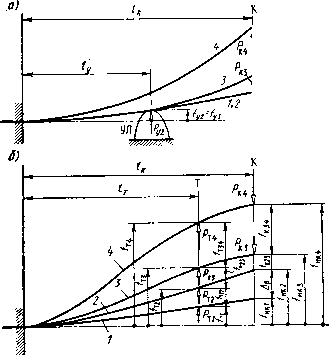 Рис. 5.6. Кривые изгиба пружии замыкающего контакта: а - пружины В; б - пружины И точек In, 2, 3 а 4i этой характеристики (рис. 5.3,«), т. е. в определении сил Рмх1=Рб1 и рабочих зазоров б„ соответствующих этим силам. Силы Pii определяются через Рт< по формулам, аналогичным (5.6); зазоры 6t - через изменения зазоров б,, i+i, которые определяются по (5.7) через изменения перемещений /"т/, <-ц по направлению Т. Основное уравнение всего расчета - (5.2). Сила Pti толкателя якоря создает предварительный изгиб пружины Н по направлению Т на /ti=/ti/cht и по направлению К на /нк1 = т/снкт (рис. 5.6,6). До момента соприкосновения контакт-деталей пружина И по направлению К пройдет путь (от нулевого положения /нк2=/нк1+Ар под действием силы, изменяющейся от нуля до Ят2=/нк2Снкт. По направлению Т перемещение будет /т2 = Рт2/снт, а на пути от положения / до положения 2 приращение перемещения /т12=/т2-/п- В положениях 3 н 4 пружина И находится под действием двух сил - Рт и Рк. Величины, необходимые для определения Ртз, Рт4 и /тгз, /тз4, получим из расчета пружины В (рис. 5.6, а). Эта пружина под действием силы Руг давления упора УП предварительно изогнута относительно своего свободного состояния по направлению У на !у2 = Ру2/Сву и по направлению К на /вк2 = Ру2/Свук • На участке 2-3 на пружину В по направлению К действует сила со стороны пружины Я, направленная вверх. В положении 3, когда эта сила равна Ркз, сила давления упора УП на пружину В Ру =0. Значит, сила Ркз, сила спечивает по направлению У перемещение /уг=/уз. Следовательно, Ркз=/узСвку. Перемещение пружины В по направлению К при этом /вкз = /кз/свк. Приращение перемещения по направлению К от момента соприкосновения контакт-деталей (положение 2) до момента снятия пружины В с упора (положение 3) у пружин И а В одинаково и равно /"к2з = /вкз-/вк2. Перемещение пружины Я по направлению К в положение 3 от нулевого положения: /нкз=/нк2-1-/к2з. Это перемещение создается одновременным действием на пружину Я двух сил: искомой Ртз, направленной вверх, и Ркз, направленной вниз. Работа пружины Я в таких условиях была описана при объяснении рис. 5.2, е. Перемещение /нкз = /нкзрт-/нкзрк=Ртз/Снтк-кз/Снк, откуда находим Ртз- Перемещение /тз пружины Я по направлению Т находим тоже как результат действия тех же сил: /тз=/тзят-/тзяк = Ртз/снт- - Ркз/снтк- Приращение перемещения по направлению Т: /т2з== =/тз-/т2. По направлению К под действием заданной силы конечного контактного нажатия Рк4 пружина В переместится на /вк4 = = Рк4/свк- Приращение перемещения от положения 3 до положения 4 по этому же направлению /кз4=/вк4-/вкз. Перемещение пружины Я по направлению К от свободного состояния до положения составит/нк4=/нкз+/кз4. Это перемещение создается при совместном действии на пружину Я силы Рт4 со стороны якоря и силы Рк4 со стороны пружины В: /нк4=/нК4 Рт-/нк4 Рк = = Рт4/снкт-Рк4/снк, откуда можно определить Рт4. Перемещение пружины Я от нулевого положения до положения 4 под действием сил Рт4 и Рк4: /т4 = /т4 Рт-/т4Рк=Рт4/Снт-Рк4/Снтк. Приращение перемещения пружины Я по направлению Т на пути от 3-го до 4-го положений /тз4=/т4-/тз. По (5.7) изменения рабочих зазоров электромагнита, соответствующие приращениям перемещений: б12=/т1.2/в тц; б2з=/т2з/а/тц; 6з4=/тз4/в/тц-Значения рабочих зазоров: б4=Аш; 63=64 + 634; 62=63 + 623; 61 = 62 + 612. Силы механизма, приведенные к рабочему зазору по формулам, аналогичным (5.6): Рми 11 = т1/тц/в; мх2=Рт2/тц А; Рмхз = = Ртз/тц/«;-/мх41 = Рт4/тц/«. По зазорам 6i и силам Р„х,- строим механическую характеристику. § 5.3. Механизм реле с плоской контактной пружиной, консольно закрепленной на якоре Работа механизма. Электромагнитное реле такого типа с одним размыкающим контактом при максимальном рабочем зазоре 6=6i (положение /) изображено на рис. 5.7, а, б. Рис. 5.7, а соответствует состояние I, при котором на якорь 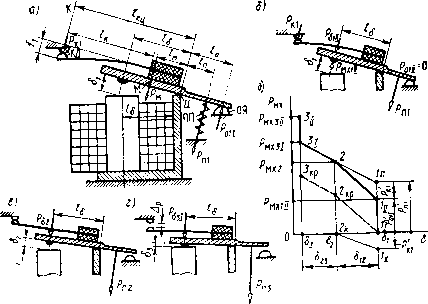 Рис. 5.7. Электромагнитное реле с плоской контактной пружиной, консольно закрепленной на якоре (а, б, в, г), и его механическая характеристика h-ln-2- 3i-3a [д) СО стороны ограничителя хода якоря ОЯ действует сила Poi i- Рис. 5.7, б соответствует состоянию И, при котором на плече /« относительно центра Ц поворота якоря к якорю приложена внешняя сила Ре, ii, снимающая якорь с упора (Poi 11=0). В любом i-м поло- [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [ 19 ] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] 0.0111 |
|||||||||||||||||||||||||||||||||||||||||||||