
|
|
|
Главная страница Магнитные цепи [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [ 17 ] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] 10-»-10-3 д при напряжении 0,0-10 В. Контактные пружины 3. 6, 8 выполнены нз пружинно-контактного сплава на основе серебра, не имеют контакт-деталей. На концах неподвижных контактных пружин 6 и 8 выдавлены сферические поверхности, по которым и происходит контактирование. Подробные сведения о реле для радяоэлектроннкн, автоматики, связи содержатся в [7, 19]. § 4.3. Поляризованные электромагнитные реле Поляризованные электромагнитные реле получили в настоящее время широкое распространение в технике. Несмотря на развитие и совершенствование приборов и устройств бесконтактной коммутации, применение поляризованных реле в современной аппаратуре автоматики увеличивается и промышленный выпуск их с каждым годом возрастает. Поляризованные реле отличаются от нейтральных электромагнитных реле направленностью действия, т. е. зависимостью перемещения якоря от направления тока в рабочих обмотках, большей чувствительностью и быстродействием. В аппаратуре автоматики они играют роль логических и измерительных. Высокая чувствительность поляризованных реле достигается благодаря наличию вспомогательного источника энергии (обычно постоянного магнита, но может быть применен и электромагнит), осуществляющего подмагничивание магнитной системы, а также благодаря сравнительно малому рабочему ходу якоря и небольшим усилиям в контактной системе. Мощность срабатывания малогабаритных поляризованных реле составляет 10-70 мкВт, что во много раз меньше мощности срабатывания чувствительных нейтральных электромагнитных реле (20-100 мВт). В поляризованных электромагнитах имеется два независимых потока: поляризующий и рабочий. Поляризующий магнитный поток в большинстве случаев создается постоянным магнитом, а рабочий- обмоткой управления. Существует много конструктивных разновидностей поляризованных реле, которые классифицируются по ряду признаков. По конструктивной схеме магнитной цепи различают реле с последовательной, параллельной (дифференциальной) и мостовой магнитными цепями; по числу обмоток управления - однообмоточные и многообмоточные, по числу устойчивых положений якоря - двухпозиционные и трехпозиционные. Поляризованное реле, как и всякое реле, состоит из воспринимающей и исполнительной частей. Каждая из этих частей имеет свои параметры и характеристики. Основными параметрами реле принято считать параметры срабатывания, возврата и временные параметры. Параметры срабатывания и возврата определяются мощностью или МДС, необходимыми для срабатывания или возврата реле. 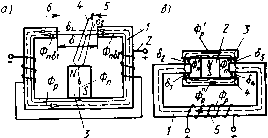 Рис. 4.11. Поляризованные реле: о - с дифференциальной магиитной цепью; б вой магнитной цепью с мосто- Исполнительный (выходной) орган характеризуется параметрами, определяющими надежность действия и коммутационную способность реле. К этим параметрам относятся: сила контактного нажатия, обеспечивающая надежное замыкание коммутируемой цепи, номинальное значение тока, протекающего через контакты, и напряжение на разомкнутых контактах. В поляризованных реле обычно используют дифференциальные и мостовые схемы магнитных цепей, которые имеют много разновидностей. Одна из принципиальных схем поляризованного реле с дифференциальной магнитной цепью изображена на рис. 4.11, а. Оно состоит из магиитопровода /, на котором размещена рабочая обмотка 2, состоящая из двух катушек, включенных последовательно и согласно. С магнитопроводом жестко скреплен постоянный магнит 3, создающий поляризующий поток Фп. Поворачивающийся якорь 4 одним концом закреплен на оси, расположенной около торца постоянного магнита, а другой конец может перемещаться от одного полюса магиитопровода к другому. Поток постоянного магнита Фп проходит через якорь и затем разветвляется иа два потока Фпв1 и Фпвг, проходящие через воздушные зазоры 6i и бг. При отсутствии тока в рабочей обмотке и среднем положении якоря между полюсами на него действуют равные, но противоположно направленные электромагнитные силы. Однако это положение якоря является неустойчивым, так как при незначительном смешении якоря к одному из полюсов сила притяжения к этому полюсу увеличивается, а к другому уменьшается. В результате этого смещение якоря возрастает, и он переходит к одному из полюсов, например к правому, замыкая при этом правый контакт 5. После включения обмоток появляется дополнительная МДС, которая создает рабочий поток Фр, проходящий последовательно через два воздушных зазора 6i и бг. При этом у одного из полюсов происходит сложение магнитных потоков, а у другого вычитание. Если полярность тока рабочей обмотки такова, что сложение потоков происходит в зазоре 6i, то при определенном значении тока якорь перебросится к левому полюсу и замкнет левый контакт 6. При изменении полярности тока якорь перебросится в противоположную сторону. Принцип действия одного из поляризованных реле с мостовой магнитной цепью иллюстрируется рис. 4.11,6. Магнитная система состоит из С-образиого магнитопровода 1, иа котором расположена обмотка 5, постоянного магнита 2, двух полюсных наконечников 3 и 4. Постоянный магнит и жестко связанные с ним полюсные наконечники могут поворачиваться иа некоторый угол относительно центральной оси. Поток постоянного магнита разветвляется иа потоки Фп и Ф"п. Поток Фп проходит через воздушные зазоры 6i и бг, а поток Ф"п - через зазоры бз и 64. При протекании тока по рабочей обмотке создается рабочий поток Фр, разветвляюшийся иа потоки Фр и Ф"р. Если полярность тока такова, что происходит суммирование магнитных потоков в зазорах 61 и 63, а вычитание в зазорах 62 и 64, то постоянный магнит вместе с полюсными наконечниками повернется по часовой стрелке. В том случае, когда суммирование потоков происходит в зазорах 62 и 64, а вычитание в зазорах 61 и бз, постоянный магнит повернется против часовой стрелки. В том случае, когда суммирование потоков происходит в зоне верхнего правого и нижнего левого полюсов, а вычитание у двух других полюсов, якорь повернется по часовой стрелке. Поляризованные реле, спроектированные иа мостовых схемах, обладают рядом преи-мушеств по сравнению с реле иа дифференциальных схемах. К этим преимуществам относятся в первую очередь возможность уменьшения габаритных размеров и массы реле, более высокая устойчивость к внешним механическим воздействиям и более высокая стабильность параметров при изменении температуры окружающей среды. Современные поляризованные реле большей частью изготавливаются с двумя и более катушками. Якорь реле может крепиться иа осях или иа пружинном подвесе. В ряде конструкций поляризованных реле якорь подвешивается на плоской пружине, что позволяет получить одинаковые конструкции двухпозиционных и трехпозиционных реле, различающихся только жесткостью пружины. Поляризованные реле могут быть одно-стабильными и двухстабильными. Двухста-бильные реле могут быть в свою очередь двухпозиционными и трехпозиционными. При двухпозициоиной настройке (рис. 4.12, а) контакты реле устанавливаются симметрично и якорь перебрасывается от одного контакта к другому при одинаковом значении тока рабочей обмот- 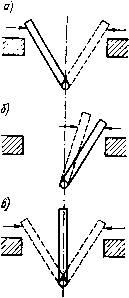 Рис. 4.12. Настройка контактов реле: а - двухпоэнцнонная настройка: б - настройка с преобладавнем; в - трехпо-знцнонная настройка ци. При отсутствии тока в рабочей обмотке якорь реле остается у контакта, к которому ои был предварительно переброшен. Якорь такого реле занимает два устойчивых положения - у левого или у правого контакта. При одиостабильиой настройке оба контакта располагаются по одну сторону от оси симметрии (рис. 4.12,6) и срабатывание реле происходит при одном определенном иаправлеиии тока в обмотке. После выключения тока якорь возвращается в исходное положение. В случае трехпозициоииой настройки (рис. 4.12, в) контакты располагаются симметрично и при снятии тока в обмотке реле якорь занимает среднее положение под действием пружины. При протекании тока в обмотке якорь отклоняется и замыкает правый или левый контакт. Якорь таких реле имеет три положения, что достигается закреплением его иа достаточно жесткой подвесной пружине. Определим электромагнитную силу притяжения якоря дифференциального поляризованного реле (рис. 4.11, а) исходя из следующих допущений: магнитное сопротивление магнитопровода равно нулю; потоками рассеяния пренебрегаем; магнитное поле в воздушных зазорах считаем равномерным. При отсутствии тока в рабочей обмотке потоки в воздушных зазорах i6i и 62 определяются соотношениями Фн51 = Фп/?«52/(/?«51 + /?«52) = = Ф„82/(81 + 82); Ф„52= Ф„81/(81 + 82), (4.3) где Фп -поток постоянного магнита; и /?мв2 - магнитные сопротивления зазоров 6i и 62. Эти потоки создают электромагнитные силы, действующие одиовремеиио и направленные в противоположные стороны: Я,„1- Фп51/(2(Хо5); Яз«2= Фп82/(2(Хо5). Здесь S - сечение полюса. Таким образом, при отсутствии тока в рабочей обмотке на якорь со стороны потоков, созданных постоянным магнитом, действует результирующая сила э«.п = Я,„2-Я,„1 = (Ф52-Фп51)/(2(Хо5). (4.4) Подставив значения потоков Фпв1 и Фпвг из (4.3) в (4.4), получим Я Фп(81-»2) 2ftoS(8i + 82) Если якорь расположен иа оси симметрии, то 61 = 62 суммарное тяговое усилие Рэм.п = 0. При протекании тока в рабочей обмотке реле создается поток Фр, замыкающийся через воздушные зазоры 6i и 62- фр=/р,Хо5/(8,+8,). где Fp -суммарная МДС рабочей обмотки. Суммарные потоки, создаваемые постоянным магнитом и током рабочей обмотки соответственно в зазорах 61 и 62: Ф51 = Фп51 + Фр; Фв2=Фп52-Фр- Результирующая электромагнитная сила, действующая на якорь. ф2 ф2 81 + 82 L 2(i;oS Ф„(б1-»2) (4.5) В момент трогания якоря Рдм = 0 и, следовательно, /=р=Фп(81-82)/(2(*о«)- Из выражения (4.5) следует, что при отрицательной МДС (противоположной, показанной на рис. 4.11, а) сила, действующая на якорь вправо, возрастает и переброса его из одного положения в другое не произойдет. При определенном значении положительной МДС сила изменит направление и якорь перейдет от одного полюса к другому. На рис. 4.13 приведены зависимости силы, действующей на якорь, обмотки для фиксированных положе-носят линейный характер и показыва-действия силы при изменении знака 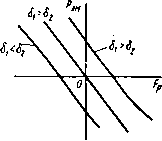 Рис. 4.13. Зависимости электро-магиитиой силы от значения МДС от величины МДС рабочей НИИ якоря. Эти зависимости ют изменение направления МДС. ГЛАВА 5. МЕХАНИЗМЫ ЭЛЕКТРОМАГНИТНЫХ РЕЛЕ В механизмах большинства электромагнитных аппаратов, в том числе и электромагнитных реле, используются пружины. По назначению их можно разбить на две группы: возвратные (или противодействующие) и контактные. Возвратные являются движущими при возврате подвижной части аппарата в начальное положение после снятия сигнала управления. Их также называют противодействующими, так как при срабатывании аппарата они действуют встречно электромагнитной силе. Контактные пружины имеются только у коммутационных аппаратов, в том числе реле. В этих аппаратах основная функция контактных пружин - обеспечить необходимое контактное нажатие. Контактные пружины могут создавать силу, совпадающую по на-лравлению с электромагнитной или противоположную последней. Иногда функции возвратной и контактной пружин совмещаются в одной или нескольких пружинах. Механические характеристики пружин и реле рассматриваются в гл. 5 без учета сил трения, веса подвижных частей механизма реле и сил, создаваемых остаточным магнитным потоком. Якорь реле принимается абсолютно жестким. Во всех случаях, при всех положениях рассматриваются реле при обесточенных обмотках. Все силы и перемещения будем снабжать индексами, соответствующими Г-му положению механизма. Поэтому под обозначениями 1, 62, бз и 64 в гл. 5 в отличие от других глав учебника следует понимать не разные по местоположению в системе немагнитные зазоры, а различные (t-e) значения одного рабочего немагнитного зазора, общее обозначение которого б, текущее -6i (t=l, 2, 3,...) § 5.1. Характеристики пружин и формулы для их расчета Характеристики пружин. В механизмах электромагнитных реле наибольшее распространение получили цилиндрическая витая и плоская консольная пружины. Цилиндрическая витая пружина изготовляется обычно из стальной проволоки круглого сечения. Работает чаще всего на сжатие или на растяжение. Применяется тогда, когда требуются сравнительно большие усилия и большие перемещения. Цилиндрическая витая пружина с рабочими и пассивными витками показана на рис. 5.1,а в четырех положениях; О-исходное (свободное) состояние; 1 - пружина сжата внешней силой Рь 2 - лружина сжата внешней силой Р2; 3-пружина растянута внешней силой Рз. В каждом из показанных на рис. 5.1, а положений лружина находится в состоянии равновесия, поэтому внешней приложенной силе Р, равна по значению и противоположна по направлению сила Рмх1, создаваемая пружиной (P, = P„i; Р - Рм-ц и з = Рм1з). В верхней части рис. 5.1, а показана механическая характеристика рассматриваемой пружины - зависимость силы Р„х, развиваемой пружиной, от перемещения / ее левого конца при закрепленном правом конце (перемещение / измеряется от положения левого конца пружины, находящейся в свободном состоянии). Пружину рис. 5.1, а будем называть свободной. Если эту пружину, предварительно сжав, поместить в стакан, который не даст ей распрямиться, то она будет иметь характеристику, показанную на рис. 5.1,6. Такую пружину будем называть предварительно сжатой. В отличие от свободной для сжатия предварительно сжатой [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [ 17 ] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] 0.0117 |