
|
|
|
Главная страница Магнитные цепи [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [ 15 ] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] ствующее при зазоре бтах точке q пересечения рассматриваемых характеристик,- состояние устойчивого равновесия. Для того чтобы отклонения в размерах и характеристиках элементов реле, допустимое повышение напряжения источника питания, уменьшение температуры окружающей среды не повлияли на надежность возврата реле, рабочее значение напряжения при возврате следует выбрать таким, чтобы обеспечить при номинальном значении всех параметров требуемый запас по силе при возврате. При этом статическая электромагнитная характеристика займет положение кривой 7 (рис. 4.3, а). Так как возврат электромагнитного логического реле осуществляется чаще всего простым размыканием его обмотки, то необходимо по крайней мере сопоставить статическую механическую характеристику и статическую тяговую характеристику, соответствующую остаточным потокам. Наибольшее влияние на вид тяговых характеристик оказывает форма полюсов электромагнита и род питающего тока. Сравнение тяговых характеристик клапанных электромагнитов постоянного тока с полюсным наконечником и без него. Сравним два электромагнита (рис. 4.4, а, б), которые отличаются друг от друга только тем, что у электромагнита рис. 4.4, а диаметр сердечника d по всей длине одинаков, а у электромагнита рис. 4.4, б конец сердечника длиной Дп.н оформлен в виде полюсного наконечника диаметром D>d. Считаем, что в системе с полюсным наконечником, несмотря на уменьшение расстояния между внутренней боковой поверхностью полюсного наконечника и вертикальной частью ярма, между ними нет потока рассеяния (с боковой поверхности полюсного наконечника МС рис. 4.4, б, как и с боковой поверхности сердечника длиной Дп.н МС рис. 4.4, а. весь поток замыкается на якорь). Предполагаем, что вращающие моменты создаются только электромагнитными силами, действующими по оси сердечника в основном рабочем зазоре б. Далее под рабочим зазором имеем в виду только этот зазор. Сравним силы, создаваемые электромагнитами рис. 4.4, в двух крайних случаях: 1) магнитное сопротивление 7?мв рабочего зазора значительно меньше суммы сопротивлений нерабочих зазоров У?мвн и магиитопровода /?„.; 2)Ньч>Ryim +Rk.m. Первый случай обычно имеет место при минимальном рабочем зазоре, при котором приближенно можно считать, что вся МДС обмотки расходуется на преодоление сопротивления магиитопровода и нерабочих зазоров. Так как магнитопроводы обеих систем практически одинаковы, нерабочие зазоры и МДС одинаковы, то можно считать, Рис. 4.4. Клапанные электромагниты без полюсного наконечника (а) и с полюсным наконечником (б) что при минимальном зазоре у сравниваемых систем одинаковы рабочие потоки Фе. В общем случае Фв=Фт-fФв, где Фт -поток между обращенным к рабочему зазору торцом сердечника (или полюсного наконечника) и якорем; Фв -поток выпучивания. При минимальном рабочем зазоре обычно ФтЗ>Фв, поэтому можно принять Фв=Фт- По формуле Максвелла, сила притяжения якоря Яз„=Фт/(2[.в5), (4.1) где 5 - площадь торца сердечника (или полюсного наконечника), обращенного к зазору (S\=nd/A\ S2=nD/4). Так как 5i<52, то при минимальном зазоре сила электромагнита без полюсного наконечника больше силы, создаваемой электромагнитом с полюсным наконечником. Второй случай (RKiR«m+Rm.m) обычно имеет место при максимальном зазоре, при котором можно считать, что магнитное напряжение на сопротивлениях магиитопровода и всех зазоров, кроме рабочего, равно нулю. Тогда при равных длинах зазора б индукция Вт=Фт/5 в зазорах обеих систем будет одинакова, так как одинаковы МДС 6„в=Ятб=Втб/р,о. По формуле Максвелла, электромагнитная сила (4.2) Так как S2>Si, то при одинаковых МДС и зазоре сила, развиваемая электромагнитом с полюсным наконечником, больше силы, развиваемой таким же электромагнитом без полюсного наконечника. Проведенное сравнение показало, что электромагнит постоянного тока с полюсным наконечником имеет более пологую тяговую характеристику, чем аналогичный электромагнит без полюсного наконечника (рис. 4.5). Для реле с входом на постоянном токе чаще всего используются электромагниты с полюсным наконечником по двум причинам; тяговая характеристика на постоянном токе даже при наличии полюсного наконечника получается достаточно крутой; электромагнит с полюсным наконечником при максимальном зазоре создает большую силу, чем электромагнит без полюсного наконечника. Так как начало движения якоря при срабатывании происходит при бтах, то наиболее существенным обычно бывает отличие в силах, создаваемых электромагнитом именно при этом зазоре. Рис. 4.5 показывает, что преимущества МС с полюсным наконечником перед МС без полюсного наконечника увеличиваются по мере увеличения бтш. При 6min = 6mid электромагнит с полюсным 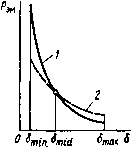 Рис. 4.5. Статические тяговые характеристики клапанных электромагнитов без полюсного наконечника (/) и с ним (2) наконечником развивает большую силу при всех возможных во время работы положениях (бтм - зазор, при котором тяговые характеристики сравниваемых электромагнитов пересекаются). Сравнение электромагнитов постояиного и переменного тока реле с обмотками напряжения. Имеются в виду электромагниты обычной конструкции, с полюсами, имеющими плоские торцы, без полюсных наконечников (например, как на рис. 1.4, а, д). Магнитопровод на постоянном токе сплошной, на переменном шихтованный. Изменение тока в обмотке при срабатывании и возврате электромагнита постоянного тока (см. рис. 3.6, а) показывает, что в динамике в его обмотке ток всегда меньше установившегося значения В § 2.2 показано, что электромагнит переменного тока обладает автоматической форсировкой: действующий ток в его обмотке при притянутом якоре всегда меньше, чем при других его положениях 1см. (2.24)]. Выгода такой форсировки очевидна: при максимальном зазоре, когда требуется большая МДС для преодоления большого магнитного сопротивления рабочего зазора, обмотка создает ее автоматически; при минимальном зазоре, когда большая МДС не требуется, обмотка ее автоматически снижает. Время переходного процесса при включении, в течение которого действующий ток в обмотке оказывается больше действующего тока при притянутом якоре, обычно значительно меньше времени, в течение которого ток в обмотке равен току при притянутом якоре (при не слишком частых коммутациях). Поэтому габариты обмотки (а значит, и всего электромагнита) обычно определяются ее нагревом током при притянутом якоре. Аналогичное изменение МДС в процессе включения электромагнита постоянного тока можно получить только с помощью специальной схемы. Автоматическая форсировка тока в обмотке электромагнита переменного тока превращается в недостаток тогда, когда существует вероятность заедания якоря в начальном или промежуточном положениях (например, при работе в условиях сильной запыленности). Так как в начальном и во всех промежуточных положениях якоря ток больше, чем ток при притянутом положении, на который обычно рассчитана обмотка, то в случае заедания она, как правило, перегревается (часто просто сгорает). Изменение электромагнитной силы с изменением длины зазора. Для электромагнита постоянного тока по (4.1) с учетом (1.40) при допущении Фт=Фв без учета сопротивления магнитопровода и нерабочих зазоров электромагнитная сила •эм=.=Фг/(2!*о5)=!о57(282). (4.3) Уравнение (4.3) показывает, что сила, развиваемая электромагнитом постоянного тока, еще больше, чем его поток, зависит от длины зазора. Реально она изменяется в меньшей степени, чем по (4.3), из-за влияния потоков выпучивания, сопротивления магнитопровода и других факторов. В § 2.2 было показано, что рабочий поток электромагнита переменного тока с уменьшением длины зазора от максимального до минимального увеличивается в значительно меньшей степени, чем поток электромагнита постоянного тока [ср. (2.25) и (1.40)]. Так как электромагнитная сила пропорциональна квадрату потока [см. (4.1)], то и сила электромагнита постоянного тока увеличивается при уменьшении зазора в значительно большей степени, чем у электромагнита переменного тока (тяговая характеристика на постоянном токе существенно круче, чем на переменном). Электромагнитныесилы при одинаковых индукции и площади поперечного сечения полюсов. Для упрощения будем сравнивать МС с одним рабочим зазором. Если создать в зазоре электромагнита переменного тока такую индукцию, амплитудное значение которой Вгт равно индукции Вт= в зазоре электромагнита постоянного тока, то при одинаковой площади сечения полюсов электромагнит переменного тока создаст среднюю за период силу Рж-, примерно в 2 раза меньшую, чем электромагнит постоянного тока. Это произойдет потому, что Рэм-определяется по (4.2) при Вт=бт~ действующей индукцией Вт~ = = BrmJV 2. Масса и габариты при одинаковых электромагнитной силе и индукции. Если одинаковы электромагнитные силы и Втт~=бт=, то по соображсниям, изложенным при предыдущем сравнении, площадь поперечного сечения магнитопровода на переменном токе должна быть примерно в два раза больше, чем на постоянном. Такое соотношение между индукциями (Втт~ = Вт=) характерно для многих электромагнитов при притянутом якоре, например для удерживающих электромагнитов, специально предназначенных для создания усилия практически без перемещения при зазорах, близких к нулю. В магнитопроводах этих электромагнитов индукции делаются такими, что их дальнейшее повышение становится нерациональным. Примерно они одинаковы на переменном и постоянном токе (на переменном токе имеется в виду амплитуда индукции). В таких условиях сравнения можно сказать, что материал магнитопровода электромагнитов переменного тока используется хуже, чем электромагнитов постоянного тока. Так как у электромагнитов переменного тока обычно не удается полностью устранить пульсацию силы, то в сравниваемом случае для устранения вибрации якоря следует дополнительно увеличить площадь поперечного сечения магнитопровода, чтобы не средняя, а минимальная тяговая сила электромагнита переменного тока была равна силе, развиваемой электромагнитом постоянного тока. Сравнение показывает, что удерживающие электромагниты лучше проектировать на постоянном токе. Масса и габариты реле при одинаковых механизмах и контактной системе. Такие реле имеют одинаковую механическую характеристику. Дополнительные условия сравнения: частота коммутаций такова, что тепловой режим обмотки электромагнита переменного тока определяется только током при притянутом якоре (тепловым действием бросков тока при включении пренебрегаем); зазор бтш близок к нулю. Сравним сначала короткоходовые электромагниты (под корот-коходовыми здесь имеются в виду электромагниты, у которых отношение хода якоря (бтах-6min) К 6min значительно меньше, чем у длинноходовых. в этом смысле короткоходовые электромагниты близки к удерживающим. На рис. 4.6, а сплошными тонкими кривыми показаны статические тяговые характеристики оптимально спроектированных корот- коходовых электромагнитов постоянного тока (кривая /) и переменного тока (кривая 2), а жирной ломаной линией 3 - их механическая характеристика. У обоих сравниваемых электромагнитов зазор Omaxl близок К Smin. Под оптимально спроектированными электромагнитами здесь понимаем электромагниты, минимальные по массе, развивающие при бтах1 одинаковую среднюю силу и имеющие одинаковую температуру обмотки. По соображениям, изложенным в предыдущем подразделе, можно сказать, что чем ближе 6maxi к 6min, тем более вероятно, что электромагнит постоянного тока окажется меньших размеров, чем электромагнит переменного. Преимущества электромагнита постоянного тока будут увеличиваться при увеличении крутизны наклонной (основной) части механической характеристики. Штриховыми кривыми на рис. 4.6, а показаны тяговые характеристики тех же электромагнитов при больших, чем бтахь зазорах. При 6max2 3>6min сила, развиваемая электромагнитом переменного тока, во много раз больше, чем постоянного. Электромагнит переменного тока с характеристикой 2 (рис. 4.6, а. б) обеспечит срабатывание реле не только с механической :характеристикой 3 на рис. 4.6, а, но и с механической характеристикой 5 на рис. 4.6, б. Электромагнит постоянного тока обеспечит срабатывание реле с механической характеристикой 5 только в том случае, если он бу- 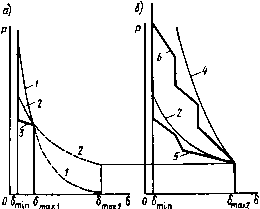 Рис. 4.6. Сравнение электромагнитов постоянного и переменного тока реле с обмотками напряжения дет иметь тяговую характеристику 4 (рис. 4.6,6). Это возможно только при МДС, значительно большей, чем у того электромагнита постоянного тока, который имел характеристику / на рис. 4.6, а. При одинаковой температуре обмоток электромагнит постоянного тока может иметь характеристику 4 только за счет увеличения габарита и массы. В этих условиях, при которых мы фактически сравниваем длинноходовые электромагниты, специально спроектированные для реле с одинаковой механической характеристикой, масса электромагнита постоянного тока может оказаться больше массы электромагнита переменного тока. Однако если при бтахг электромагниты постоянного н переменного тока должны обеспечивать срабатывание реле с круто поднимающейся механической характеристикой 6 (рис. 4.6, б), то меньшей массы может оказаться электромагнит постоянного тока. Выводы. При заданных ходе в контакте (раствор-Ьпровал), контактном нажатии и характеристике-возвратной пружины электромагнит постоянного тока будет тем меньших размеров, чем меньшим перемещением якоря (изменением длины рабочего зазора) мы обеспечим заданный ход в контакте. Электромагнит переменного тока - наоборот. Для электромагнитов постоянного тока выгодно поэтому увеличивать в разумных пределах Im/h (см. рис. 4.1, а), а для электромагнитов переменного тока - уменьшать. Действительно, на постоянном токе увеличение Im/k, например, в 2 раза позволяет уменьшить ход якоря в 2 раза (при заданном ходе в контакте) и потребует увеличить электромагнитную силу в 2 раза по сравнению с требуемым усилием в контакте. Но уменьшение зазора в 2 раза приведет в соответствии с (4.3) к увеличению силы примерно в 4 раза. Так как силу нужно увеличить всего в 2 раза, то можно уменьшить МДС, т. е. в конечном счете массу и габарит электромагнита при той же температуре обмотки. Электромагниты реле постоянного тока часто поэтому делаются клапанными (см. рис. 3.1 и 4.1, а), в которых /кц>/в (это правило по конструктивным и другим соображениям не всегда выполняется). На переменном токе получили большее распространение реле с прямоходовы-ми МС (см. рис. 4.1, в); в таких реле ход в контакте равен ходу якоря. Для заданного хода в контакте и требуемого контактного нажатия вопрос о том, какой из электромагнитов, постоянного или переменного тока, окажется минимальным по массе, можно решить только в каждом конкретном случае часто только расчетным путем. При сравнении электромагнитов переменного и постоянного тока необходимо учитывать также и другие факторы, о которых здесь не говорилось и которые влияют на выбор рода тока питания (технологичность, механическая износостойкость, надежность и пр.). Большинство малогабаритных и миниатюрных реле работают на постоянном токе. Электромагнитные реле относительно больших размеров, например реле управления серии РПЛ (см. § 4.2), получаются меньшей массы на переменном токе; удерживающие и ко- [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [ 15 ] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] 0.0109 |