
|
|
|
Главная страница Магнитные цепи [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [ 14 ] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] движении якоря, вплоть до его конечного положения при срабатывании, происходит увеличение контактного нажатия. В конструкции рис. 4.1, а при этом происходит изгиб пружины / подвижного контактного элемента; в конструкциях рис. 3.1 и 4.1, б - изгиб подвижных 1 и «неподвижных» / контактных пружин. В конструкции рис. 4.1, в после соприкосновения контакт-деталей 2 мостика 8 с неподвижными контакт-деталями 2 и 2" левый конец контактной пружины останавливается, тогда как правый конец продолжает переме- 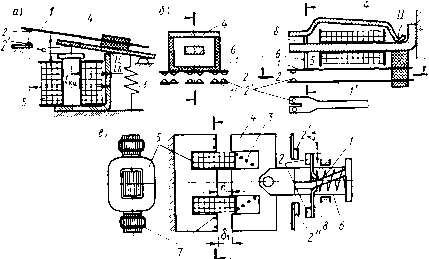 Рис. 4.1. Одностабильные электромагнитные реле с неуравновешенным якорем щаться вместе с тягой 6, увлекаемой якорем. При этом происходит сжатие контактной пружины /. «Неподвижными» контактные пружины /МС рис. 3.1 и 4.1, б называются потому, что непосредственно с подвижной системой реле онн не связаны. В кавычки слово взято нз-за того, что в действительности после соприкосновения контакт-деталей онн перемещаются. Далее кавычки опускаем. Контакт-детали 2МС рис. 4.1, а, а также 2 и 2"МС рис. 4.1,0 являются частью жестких коротких контактных элементов, которые остаются практически неподвижными н после соприкосновения контакт-детален. Положение одностабильного электромагнитного реле при минимально возможном зазоре (прн 6 = 6min) н рабочем значении тока в обмотке будем называть его конечным положением. После снятия входного сигнала ток обмотки уменьшается до нуля, а поток в магнитопроводе уменьшается от максимального значения до остаточного. При некотором значении потока, большем остаточного, сила, развиваемая деформированными при срабатывании пружинами электромагнита, оказывается больше электромагнитной силы. В этот момент якорь начинает движение в обратном направлении. Якорь возвращается в исходное (начальное) положение под действием: контактных пружин / и / на рис. 3.1 и 4.1,6; контактной лружины / и возвратной пружины 3 на рис. 4.1, а, в. Для уменьшения остаточного потока до величины, при которой исключается «залипание» якоря, вместо немагнитных прокладок 2 (см. рис. 1.1, а) могут использоваться заклепки, устанавливаемые непосредственно на якоре,- «штифты отлипания». Иногда в таких специальных конструктивных элементах вообще не возникает необходимости, например при большой толщине немагнитных покрытий магнитопровода, при сильных возвратной и контактной пружинах, яри значительных нерабочих зазорах. Остаточный поток реле рнс. 4.1,0 уменьшается из-за разных по длине зазоров (6>6i, так что при 6i = 0 зазор б>0). Под длиной рабочего зазора б для систем с несколькими рабочими зазорами на рис. 3.1, 4.1 и далее в гл. 4 имеется в виду основной рабочий зазор, к которому приводятся электромагнитная и механическая силы. Для клапанной МС длина зазора б - расстояние между якорем н торцом сердечника (или полюсного наконечника, если он имеется), измеренное вдоль оси сердечника. В этом зазоре у этой МС создается ббльшая часть вращающего момента. На рис. 4.2 показаны конструкции электромагнитов реле, у которых ось вращения О якоря / проходит через центр массы подвижных частей. Такие реле используются при повышенных требованиях к виброустойчнвости, удароустойчнвостн н устойчивости к линейным ускорениям (подробнее см. § 5.4). На этом рисунке рабочий поток в плоскостях, параллельных плоскостям проекций, показан сплошной линией to стрелками, а в плоскостях перпендикулярных - крестиком н точкой в кружках. Согласование тяговых я механической характеристик. Электромагнитная сила - сила, действующая на ферромагнитное тело в магнитном поле. Тяговая характеристика электромагнитного реле- это зависимость суммарной электромагнитной силы, действующей на якорь н приведенной к рабочему зазору, от длины этого зазора при постоянном (не зависящем от положения якоря) напряжении питания для обмоток напряжения илн прн постоянном (не зависящем от положения якоря) токе для токовых обмоток (или зависимость суммарного электромагнитного момента, действующего на якорь, от угла его поворота). При возврате реле электромагнитная сила, которая создается электромагнитом практически всегда, даже при полностью обесточенной обмотке (за счет остаточного потока в магнитопроводе) оказывает сопротивление движению, прн срабатывании она является движущей. Сила трения всегда оказывает сопротивление движению. Далее при объяснениях для удобства силой трения, а также весом подвижных частей реле будем пренебрегать. Тяговая характеристика при медленном изменении положения якоря называется статической, при быстром - динамической. Статическая механическая характеристика (далее механическая характеристика) - это зависимость суммарной силы, действующей на подвижную часть аппарата, от перемещения (или момента этих сил от угла поворота). Учитываются все силы, кроме электромаг- 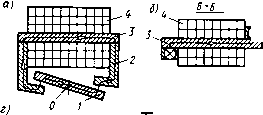 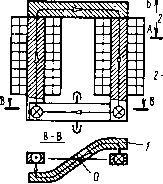
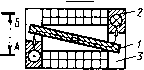 Рис. 4.2. Электромагниты реле с уравиовешеииым якорем: О-ось поворота якоря; / -якорь; 2-полюс; 3 -ярмо; 4- катушка; 5 - возвратная пружина нитной, создаваемой МС аппарата. Имеется в виду столь медленное перемещение, при котором можно пренебречь силами инерции движущихся масс. При срабатывании механические силы, как правило, противодействуют движению. Поэтому механическую характеристику называют иногда противодействующей. Однако при возврате механические силы являются движущими, поэтому термин «противодействующая» является менее удачным, чем «механическая». Под механической характеристикой электромагнитного реле обычно имеется в виду зависимость суммарной силы, действующей на якорь и приведенной к рабочему зазору, от длины этого зазора (или момента от угла поворота якоря). В суммарную силу не входит электромагнитная сила, создаваемая МС реле, но входят силы реакций опор якоря и упоров пружин (см. гл. 5). Для нормальной работы реле его динамические тяговые характеристики при срабатывании и при возврате должны быть согла- сованы с механической характеристикой. Часто ограничиваются согласованием статических тяговых характеристик при срабатывании и возврате с механической характеристикой, так как достаточно точный расчет динамических характеристик электромагнитного реле слишком сложен. Рассмотрим вопрос согласования этих характеристик для частного случая - логического электромагнитного реле, управляемого источником напряжения. При разном напряжении, приложенном к обмотке реле, статические тяговые характеристики реле (кривые 2, 2, 3-7, рис. 4.3) относительно механической (жирные ломаные линии / на рис. 4.3) могут занимать разное положение: быть выше основной части механической характеристики, не соприкасаясь с ней (кривые 4 на рис. 4.3, а, б) или соприкасаясь в одной какой-либо точке (кривые 2 на рис. 4.3); пересекать ее (кривые 5 и 5 на рис. 4.3, б и 2 на рис. 4.3, в); быть ниже основной части механической характеристики, соприкасаясь с ней в какой-либо точке (кривые 3 на рис. 4.3, а, б) и не соприкасаясь с ней (кривая 7). Здесь и далее под основной частью механической характеристики подразумевается участок песЬ (рис. 4.3) между ее вертикальными частями, соответствующими максимальному и минимальному зазорам. Очевидно, что при напряжении, соответствующем статической тяговой характеристике 2, якорь притянется к сердечнику, так как при этом напряжении при всех зазорах в диапазоне от бтах ДО бтш 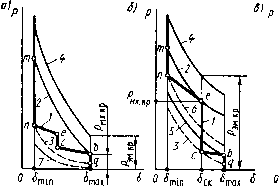 "min Чк "max Рис. 4.3. Статические (2, 2, 3, 4, 5, 6, 7), динамическая (2") и механическая {I) характеристики электромагиитиого реле статическая электромагнитная сила больше механической или равна ей, причем состояние подвижной системы реле, соответствующее бтах на рис. 4.3, а, можно считать состоянием неустойчивого равновесия (при любом бесконечно малом увеличении напряжения питания обмотки или бесконечно малом уменьшении зазора якорь начнет перемещаться в сторону дальнейшего уменьшения зазора вплоть до 6min). Состояние подвижной системы реле, соот- ветствующее зазору 6min, при котором тяговые характеристики 2 пересекаются с механической / в точке т (рис. 4.3, а, б),- состояние устойчивого равновесия (при некотором, даже не бесконечно малом изменении напряжения питания якорь реле останется прн 6min неподвижным, при некотором - тоже не бесконечно малом - случайном увеличении зазора возникнут силы, возвращающие якорь в конечное положение, при котором зазор равен бтш). При приложении к обмотке реле напряжения, соответствующега статическим тяговым характеристикам 5, 6 (рис. 4.3, б) и 2 (рис. 4.3, в), пересекающим основную часть механической характеристики (на длине ее), реле может сработать, а может и не сработать. На рис. 4.3, в показана статическая тяговая характеристика 2 и соответствующая этому же напряжению динамическая характеристика 2" того же реле. Динамическая тяговая характеристика электромагнита постоянного тока при срабатывании всегда лежит ниже статической, так как мгновенный ток Ibx в обмотках (см. рис. 3.6, а) такого реле всегда меньше установившегося тока, соответствующего статической тяговой характеристике. Это значит, что мгновенный поток в зазоре, создающий электромагнитную силу, меньше установившегося. При зазорах от бтах ДО зазора бек (рис. 4.3, в) тяговая характеристика 2 лежит выше механической. Суммарная сила Рх, действующая на якорь реле и равная разности электромагнитной динамической Рэм.д и механической Ямх, увеличивает скорость движущихся частей реле (так как Pj при уменьшении зазора увеличивается, то увеличивается также и ускорение). Движущиеся массы приобретают кинетическую энергию, равную работе А\ суммарной силы на участке от бтах до бек и пропорциональную площади криволинейного треугольника аЬс (рис. 4.3,0). При зазорах от бен ДО б электромагнитная сила меньше механической (б - зазор, при котором эти силы равны). На этом участке суммарная сила, равная разности механической и электромагнитной динамической сил, уменьшает скорость движущихся частей. При этом кинетическая энергия, накопленная ими при движении на пути от бтах до бек, переходит в потенциальную энергию сжатых пружин. Работа Аг суммарной силы на этом участке пропорциональна площади криволинейного треугольника ade на рис. 4.3,0. Если Ai>A2 (площадь аЬс больше площади ade), то подвижная система реле будет продолжать движение вплоть до бтш, причем на участке от б до 6min она будет ускоряться под действием силы Рх=Рэм.д-Рмх. накапливая кинетическую энергию. Если А\<А2, то после нескольких колебаний подвижная система реле остановится при зазоре бек- Такой режим следует рассматривать как аварийный, так как при этом не обеспечивается нормальное нажатие соприкасающихся контакт-деталей. Так как динамические тяговые характеристики при приложении к обмотке того же напряжения, которое прикладывается при получении статических тяговых характеристик 2 (рис. 4.3), соприкасаю- щихся с основной частью механической характеристики 1 в одной точке (при бтах на рис. 4.3, а и бек на рис. 4.3,6, 0), лежат ниже статических тяговых, то при таком взаимном положении статических тяговых и механической характеристик возможно некоторое замедление движения якоря реле, иногда даже кратковременная остановка при некотором промежуточном зазоре. После этого реле все же срабатывает. Для того чтобы отклонения в размерах н характеристиках элементов реле, допустимое снижение напряжения питания, увеличение температуры окружающей среды не повлияли на надежность срабатывания реле, рабочее значение напряжения питания выбирают таким, при котором при критическом зазоре бкр будет обеспечен необходимый запас по силе при номинальных значениях всех параметров. Критический зазор - это зазор, при котором статическая тяговая характеристика при срабатывании, лежащая выше основной части механической и имеющая с этой частью одну общую точку, соприкасается с последней. На рис. 4.3, а зазор б„р= = бтах; на рис. 4.3,6, 0, зазор бкр=бск- Коэффициент запаса по силе при срабатывании кз р ср= =Рэм.кр/Рмх.кр. Рэм.кр и Рмх.кр показаны на рис. 4.3, а, б. При выборе коэффициента запаса йзРср при проектировании реле кроме перечисленных выше факторов необходимо учитывать также и то, что увеличение ЛзРср приводит к увеличению массы, габаритов, потребляемой мощности, вибрации якоря и ускоряет механический износ реле, так как деформация элементов реле и расшатывание его происходят главным образом за счет энергии, накапливаемой подвижной системой при движении. После состояния завершенного срабатывания, при котором якорь находится в положении, соответствующем бтш, возврат якоря в начальное положение может быть осуществлен путем снижения напряжения питания, размыкания или закорачивания обмотки. Рассмотрим первый путь. На рис. 4.3, б показаны статические тяговые характеристики 6 к 5, соответствующие напряжениям, при которых при зазорах от бтш ДО бек электромагнитная сила меньше механической или равна ей. Последняя в данном случае является движущей. Якорь реле начнет движение в сторону увеличения рабочего зазора. При этом состояние завершенного возврата, при котором якорь возвращается в положение, соответствующее бтах, может произойти, а может и не произойти. Все будет зависеть от соотношения между динамическими тяговыми и механической характеристиками. При напряжении, соответствующем статической тяговой характеристике 3 (рис. 4.3, а, б), якорь вернется в начальное положение (бтах), так как при этом напряжении при всех зазорах механическая сила больше электромагнитной силы илн равна ей. При этом напряжении питания состояние подвижной системы реле, соответствующее при бтш точке п соприкосновения тяговой 3 и механической / характеристик на рис. 4.3, а,- состояние неустойчивого равновесия, а состояние подвижной системы реле, соответ- [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [ 14 ] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] 0.013 |
|||||||||||||||||||||||||||||||||||||||||||