
|
|
|
Главная страница Магнитные цепи [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [ 11 ] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] части магиитопровода. Замыкающим будет вектор МДС Р\ [см. (2.62)]. Треугольник напряжений 0ei = Oeu tlRi и Ul строим по (2.45). Выводы по результатам сравнения: 1. Поток Фг, проходящий через часть полюса, охваченную КЗВ, отстает по фазе от потока Фо, проходящего через не охваченную КЗВ часть полюса. 2. Если на часть поперечного сечения полюса МС надеть КЗВ, то в этой системе увеличится МДС обмотки (fi>Fi) и произойдет перераспределение магнитного потока: поток через охваченную КЗВ часть полюса уменьшится по модулю (Фг<Ф2), через неохваченную- увеличится (Фо>Фо). Такое изменение по модулю этих потоков получилось, несмотря на то, что при выбранном согласном направлении МДС КЗВ и обмотки потоки через охваченную КЗВ часть полюса складываются, а через не охваченную вычитаются [см. рис. 2.15 и 2.16 и уравнения (2.61)]. Увеличение по модулю потока через не охваченную КЗВ часть полюса (после установки КЗВ) осложняет расчет, так как при получающихся в этой части полюса амплитудных значениях индукции, обычно больших индукции насыщения материала магиитопровода, кривая изменения потока Фог во времени становится существенно несинусоидальной. При синусоидальной кривой Фи несинусоидальной будет и кривая потока Фг*. 3. У системы с КЗВ угол потерь б больше, а угол ф между током и напряжением меньше, чем эти величины б и ф у системы без КЗВ (рис. 2.17, а). 4. Так как стороны треугольников Фо, Фо, -Ф кзв и Омо, AF, Оыо (см. рис. 2.17,0) параллельны друг другу, то нетрудно видеть, что в системе с КЗВ МДС обмотки, а значит, и ее ток по модулю больше, чем в системе без КЗВ, причем увеличение это происходит за счет составляющей AF, перпендикулярной потоку Фг (составляющие МДС обеих систем, согласные с потоком Фг, одинаковы). Так как Ф = Ф, то Омб1 = Омвь 0».м\и„.м\ и МДС обмоток этих систем f, и f, отличаются друг от друга на такое же AF, на какое отличаются магнитные напряжения От и Оо (Pi = P\ + AF и Ом=0»о + АР). Описанное выше сравнение МС с КЗВ и МС без КЗВ проводилось при одинаковом потоке, сцепленном с намагничивающей обмоткой Ш. При этом в обмотках обеих систем должны наводиться одинаковые ЭДС. Так как токи в них получаются разными, то из-за разных и IlRi должны несколько различаться напряжения питания (t/>f/i). Однако для МС с обмотками напряжения это различие незначительно. Таким образом, приняв при сравнении систем 0i = Ou мы может сделать практически те же выводы. Для того чтобы убедиться в том, что результаты исследования не зависят от направления тока в КЗВ, примем при анализе рассмотренной МС условно-положительное направление тока в КЗВ противоположным показанному на рис. 2.14, б, г (что означает также и противоположные показанным на рис. 2.14, б, в, г и 2.16 направления МДС р2, напряжения U2 и потока Фкзв ). Тогда получим уравнения: 17г=/2г=-2, Окб2-Ог,.мо-Омбо= 2; Фо = =фо+Фкзв и Фг=Ф2-Фкзв . Они отличаются от (2.47), (2.55) и (2.61) знаком минус перед £2, Рг и Фкзв , направление которьпс изменилось на противоположное (в схемах замещения ЭДС £2 включается навстречу току h, МДС £г -навстречу потоку Фг). Изменяется на противоположное направление потока Фкзв , создаваемого МДС 2. На рис. 2.17, б для встречных МДС обмотки и КЗВ построена векторная диаграмма, которая позволяет сделать те же выводы, что и диаграмма рис. 2.17, а.  Раздел второй Электро• механические реле Приводятся общие сведения о реле (дается их классификация, объясняются термины, параметры характеристики); рассматриваются реле, в основе конструкции которых лежит магнитная система (электромагнитные, электромагнитные поляризованные, магнитоэлектрические, ферродинамические индукционные). ГЛАВА 3. КЛАССИФИКАЦИЯ, ПАРАМЕТРЫ, ХАРАКТЕРИСТИКИ, КАТЕГОРИИ ПРИМЕНЕНИЯ РЕЛЕ Аппарат релейного действия осуществляет скачкообразное изменение выходной (управляемой) величины У при заданных значениях входной (управляющей) величины X (имеется в виду скачкообразное изменение У не во времени, а в зависимости от X). К некоммутационным аппаратам релейного действия относятся, например, электромагнитные исполнительные аппараты: выходная величина (перемещение якоря) скачкообразно увеличивается от минимальной до максимальной при одном значении входной величины (ток в обмотке или напряжение на обмотке) и уменьшается от максимальной до минимальной -при другом. Простейший коммутационный аппарат такого типа приведен на рис. 3.1 в начальном положении. Будем постепенно увеличивать ток /вх в его обмотке 5 (/вх - входной сигнал X). При некотором его значении якорь 3 притянется к сердечнику 4. В процессе этого дви-70 жения верхний конец якоря изогнет плоскую контактную пружину / вверх до соприкосновения ее контакт-детали 2 с контакт-деталью 2 контактной пружины 1 - произойдет замыкание контакта. По выходной цепи аппарата будет протекать ток, который после окончания переходного процесса станет равным /вых (/вых - выходная величина У). Выходной ток не изменится при дальнейшем увеличении входного. Если теперь уменьшать входной ток, то при некотором его значении изогнутые пружины 1 и 1 преодолеют сн.ту притяжения якоря к сердечнику и вернут якорь в исходное положение. При этом контакт разомкнётся, а выходная цепь обесточится. Под входной величиной X и выходной У такого аппарата можно иметь в виду и другие величины, например напряжение на обмотке и напряжение на сопротивлении нагрузки Rn. 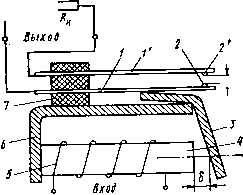 Рис. 3.1. Простейшее электромагнитное реле с замыкающим контактом из плоских консольно закрепленных контактных пружии: / н / - соответственно подвижная н неподвижная контактные пружины; 2 н 2 - контакт-детали: 3 - якорь; 4 -сердечник; 5 -обмотка; * - ярмо; 7 - изоляционная планка. Контактная пружина / и контакт-деталь 2 вместе-контактный элемент (то же / и 2): I, 2, Г, 1 н 7 -контакт (контактный узел); - раствор контакта 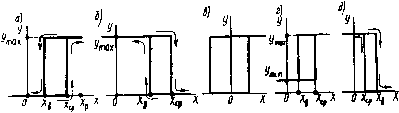 Рис, 3.2, Типичные характеристики управления аппаратов релейного действия: а, 6, в, а - электромеханических; г - статических электрических; а, б, г, в-одно-стабильных; в - двустабнльиых; а, б, г - максимальных; д-минимальных; а, г. д - работающих иа замыкание; 6 - работающих иа размыкание Характеристика управления аппарата релейного действия имеет форму релейной петли (рис. 3.2): скачкообразное возрастание выходной величины происходит при одном значении входной, а уменьшение -при другом. При всех остальных значениях входной величины X выходная У не изменяется или изменяется незначительно. к коммутационным аппаратам релейного действия относятся реле и контакторы. Иногда граница между ними выглядит неопределенно, один и тот же аппарат можно назвать как реле, так и контактором. При определении границы между реле и контакторами будем исходить из следующего: 1. Реле коммутирует в основном цепи управления, сигнализации, связи и пр. (например, цепь обмотки электромагнитного контактора). Контакторы коммутируют главным образом силовые цепи, в которых происходит преобразование электрической энергии в механическую (например, цепь электродвигателя), и наоборот. 2. У контакторов в основном имеются специальные дугогаситель-ные устройства, а у реле, как правило, этих устройств нет. Контакторы рассматриваются в курсе «Аппараты управления», в курсе «Электромеханические аппараты автоматики» рассматриваются реле. В зависимости от области применения реле последние можно разбить на реле для: 1) промышленной автоматики; 2) защиты электроэнергетических систем; 3) радиоэлектроники: 4) летательных аппаратов; 5) морских и речных судов; 6) систем регулирования движения поездов и обеспечения безопасности на железных дорогах; 7) горно-рудной и нефтегазодобывающей промышленности и др. Промышленная автоматика включает в себя автоматику процессов потребления электроэнергии в промышленности (преобразование электроэнергии в механическую работу электродвигателями, в теплоту электропечами; использование электроэнергии для дуговой плавки металлов, для электролиза и т. д.). Реле, применяемые для управления и защиты электроприводов, называются реле управления. Это наиболее массовый вид продукции первой области применения реле. Реле, применяемые для защиты электроэнергетических систем, осуществляющих выработку электроэнергии (электростанции), передачу и распределение ее по потребителям (электрические сети и системы), называются реле защиты. Реле третьей области применения используются для управления режимами работы радиоэлектронной аппаратуры, для усиления, контроля, защиты, измерения, счета, запоминания, кодирования и т. д. На основе реле создаются системы комплексной автоматики и телемеханики, автономного управления и встроенного контроля, вычислительные, программные и телеграфные устройства, шифраторы и дешифраторы, автоматические телефонные станции и т. п. Специфика областей применения реле приводит к большому разнообразию конструктивных исполнений и видов реле. С другой стороны, границы, отделяющие одну область применения от другой, часто условны, определяются ведомственной подчиненностью предприятий, выпускающих реле; поэтому многие реле, спроектированные для одной цели, иногда можно с успехом использовать для дру- гой. Дальнейшее изложение вопроса базируется главным образом на нормативных документах для первых трех областей их применения. § 3.1. Классификация, составные части реле Классификация. Реле можно классифицировать по многим признакам (рис. 3.3). В зависимости от физической природы управляющего сигнала реле бывают электрические, тепловые, механические, оптические и пр. Электрические реле реагируют на электрические параметры: ток, напряжение, мощность, электрическое сопротивление цепи и т. п. Тепловые реле реагируют на температуру, количество теплоты и т. д. Реле, в которых используется тепловое действие тока, относятся к электрическим и называются электротепловыми. Механические реле реагируют на силу, давление, скорость, перемещение и т. п. В зависимости от выполняемых функций электрические реле делятся на логические и измерительные. Электрическое логическое реле предназначено для срабатывания и возвращения в исходное состояние при изменении входной воздействующей величины, не нормируемой в отношении точности. Срабатывание реле -выполнение реле функции, для которой оно предназначено. Возврат реле - переход реле в исходное состояние из состояния, в котором оно находилось после срабатывания. Входная воздействующая величина логического реле -это величина, на которую реле предназначено реагировать, если она приложена в заданных условиях {X на рис. 3.2). Электрическое измерительное реле предназначено срабатывать с определенной точностью при заданном значении или значениях характеристической величины. Характеристическая величина измерительного реле - это электрическая величина, нормируемая в отношении точности и определяющая функциональный признак реле. Для ее образования необходима входная воздействующая величина электрического измерительного реле или несколько входных воздействующих величин. Чтобы пояснить принципиальную разницу между логическим и измерительным реле, сравним два таких реле, имеющих в качестве входной воздействующей величины напряжение. Логическое реле предназначено для срабатывания или возврата при дискретном изменении входной воздействующей величины (в нашем примере напряжение подается на вход реле или не подается). В отличие от логического обмотка измерительного реле постоянно находится под напряжением, следит за его изменением (входная величина измеряется непрерывно). Напряжение для него не только входная воздействующая, но и характеристическая величина. Если это максимальное реле, то оно сработает, когда напряжение возрастет до [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [ 11 ] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] 0.0207 |