
|
|
|
Главная страница Принципы преобразования [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [ 22 ] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] с помощью чувствительной катущки с самоиндукцией, Измерительные преобразователи, в которых используется этот принцип, являются обычно бесконтактными (рнс. 5.7, й). Кроме того, существуют и связанные индуктивные преобразователи перемещений (рис. 5.7,6), в кото- рых сердечник катущки механически связан с телом, перемещение которого измеряется. Бесконтактные преобразователи описываемого типа применяются в качестве базы для построения индуктивных датчиков приближения и индуктивных выключателей приближения. Магнитные измерительные преобразователи перемещений Преобразователи этого типа основаны на принципе изменения магнитного сх)нротивления между двумя или более магнитными катушками, возбуждаемыми переменным током, в зависимости от перемещения тела. Последнее обстоятельство вызывает изменение выходного напряжения преобразователя. Преобразующий элемент выполняется таким образом, чтобы его можно было ис-Ьпользовать в различных типах приборов, в которых осу-ществляется преобразование измеряемой физической величины в перемещение. Таким образом определяется измеряемая величина. У дифференциального трансформатора с линейно изменяющимся выходным сигналом три катушки намотаны вдоль одной и той же оси, центральная катушка является первичной. При возбуждении первичной катушки переменным током, когда сердечник движется внутрь катушек, изменяется связь между первичной и вторичны-мп катушками. В результате на выходе вторичных обмоток изменяются значение и фаза напряжения. На рис. 5.8, о показаны напряжение и фаза на выходе дифференциального трансформатора. Напряжение равно нулю, когда сердечник находится в центральном или нулевом положении. Выходная характеристика прибора является фактически нелинейной, но обычно считается линейной в центральной области перемещения сердечника (имеет нелинейность менее 1 %). С помощью дифференциального трансформатора можно измерять перемещения от нескольких миллиметров до метра. Аналогичным образом работает и дифференциальный трансформатор с угловым изменением выходного напряжения. Он позволяет измерять углы в диапазоне ±40°, 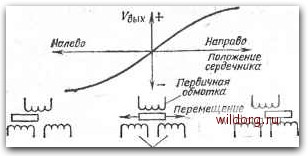 Вторичные обмотка Перемещение Вход 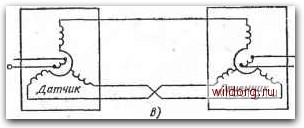 %Вшод Рис. 5.8. Магнитные измерительные преобразователи перемещений! о - дифференциальный трансформатор с линейно изменяющимся выходом (ДТ); 6 - использование фазочувствнтельного детектора (ФД) вместе с дифг ференциалБным трансформатором; в - сельсин; г - вращающийся сивуснб-кв синусный преобразователь к сожалению, дифференциальные трансформаторы основываются на получении выходного напряжения переменного тока и соответствующей фазы этого напряжения. Поэтому они применяются, как правило, вместе с фазочувствительными детекторами (см. рис. 5.8,6), у которых на выходе получается напряжение постоянного тока: положительное, когда сердечник находится по одну сторону от нулевого положения, и отрицательное, когда он перемещается в другую сторону. Выходное напряжение равно нулю, если сердечник находится в цен-f тральном положении. i; Некоторые дифференциальные трансформаторы ис-; пользуются совместно с внутренними генераторами, де- текторами, фильтрами и усилителями, которые позволяют применять преобразователи с возбуждающим напряжением постоянного тока. На выходе у них получается выпрямленное напряжение постоянного тока. Такие при- боры позволяют пользователям применять и5с с обычными преобразователями. У сельсина одиночная первичная обмотка ротора поворачивается вместе с перемещением измеряемого объекта. Три статорные вторичные обмотки, расположенные друг к другу под углом 120°, формируют выходную обмотку. Переменный ток возбуждает ротор (этот ток называют опорной частотой) и индицирует выходной сигнал на трех вторичных обмотках. Соотноше- ние между выходами соответствует положению ро- t тора. Обычно сельсинные системы для измерения переме-. щений имеют в своем составе два идентичных узла: передающий сельсин (так называемый сельсин-датчик) и сельсин-приемник (сельсин-трансформатор или трансформатор для питания цепей управления). Оба сельсина соединяются по схеме, показанной на рис. 5.8, в, так, чтобы перемещение ротора сельсина-датчика вызвало поворот ротора сельсина-приемника на один и тот же угол. Поэтому сельсин-приемник может быть использован как база для индикаторных приборов - положение его тора отображает угловое перемещение объекта измерений. Кроме того,-он применяется для выполнения некоторой механической работы. В этом случае сельсин-приемник называется сельсином крутящего момента. : В измерительных системах для выработки управляющих [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [ 22 ] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] 0.0103 |