
|
|
|
Главная страница Принципы преобразования [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [ 13 ] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] если начертить нормализованные кривые, т. е. переходные характеристики в нормализованных осях (рис. 3.5). Нормализованные кривые переходных характеристик приложимы к любым измерительным преобразователям с линейной АЧХ- второго порядка. Таким образом, зная Рис. 3.5. Нормализованные кривые переходных характеристик линейных преобразователей второго порядка, с помощью которых переходная характеристика любого преобразователя с линейной реакцией второго порядка может быть вычислена при известном значении степени демпфирования: л-конечное значение; лг,-реакция- 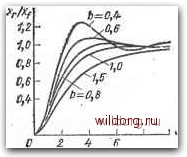 отношение демпфирования, инженер просто выбирает соответствующую кривую, затем устанавливает временную шкалу в соответствии с известным значением собственной угловой частоты. Преобразователи с линейными характеристиками первого и второго порядка У преобразователей с линейными характеристиками первого и второго порядка много общего, но есть и различия, главные из которых должны быть известны специалистам. Какой из этих типов преобразователей использовать, зависит в большой степени от характера измеряемой величины. Единственно, чем отличаются преобразователи с характеристикой (реакцией) первого порядка от преобразователей второго порядка, так это тем, что в математическом представлении переходной характеристики первых из них имеется .уравнение, в котором максимальным порядком производной по времени является производная первого порядка. Таким образом, дифференциальное уравнение, описывающее поведение преобразователя первого порядка, записывается в виде "= т. е. реакция является функцией первого порядка, поскольку максимальная производная по времени uxjut имеет первый порядок. С другой стороны, если дифференциальное уравнение преобразователя записывается в виде то его реакция является функцией второго порядка, поскольку максимальная степень производной по времени" (fx/dp равна двум. Продолжим рассмотрение основных характеристик преобразователей. 3. Внешние условия. Они определянЗт«работу прибора при изменениях измеряемой величины, наличии механических перемещений или других эффектах, вызванных внешними воздействующими факторами. Большинство измерительных преобразователей используется в условиях, далеких от идеальных. Стандартные значения комнатной температуры, влажности и давления редко встречаются в промышленности, и поэтому при выборе преобразователя должно быть известно, в состоянии ли он функционировать точно или по крайней мере в установленных пределах во всех возможных внешних условиях. Воздействие температуры на работу прибора может быть заранее известно, а ее значение указывается изготовителем любого преобразователя для того, чтобы инженер мог спроектировать необходимую схему ко1мпен-сации или скорректировать конечный результат измерительной системы. Диалогичным образом влияют на результат измерений вибрации, ускорения, изменения внешнего давления или неточный монтаж преобразователя. Количество других внешних факторов зависит от того, как используется прибор. Помещение преобразователя в жидкость может оказывать влияние на его работу, если корпус не изолирован. Коррозия под действием солей, кислот и т. п. может также влиять на конечный результат, если корпус преобразователя соответствующим образом не защищен. Локальное электромагнитное поле также может воздействовать на преобразователь и схемы его соединения с измерительной системой. 4. Надежность - это способность преобразователя правильно работать в известных статических, динамических и внешних условиях в течение определенного периода времени. Как долго преобразователь может работать правильно, определяется более точно в терминах его времени работы до отказа. Существует большое число механизмов и процессов, приводящих к отказам, различна также и частота отказов. Общими типами отказов являются следующие: 1) внезапны1е отказы, при которых компоненты отказывают без предупреждения. Их нельзя предсказать; 2) постоянные отказы, которые можно предсказать, если проверка показывает рассогласование установленных и действительных результатов измерений; 3) частичные отказы, характерные тем, что преобразователь еще работает, хотя результаты его проверки находятся вне установленных допусков; 4) полные отказы, характеризующиеся невозможностью выполнять предписанные преобразователю функции; 5) катастрофические отказы, являющиеся и внезапными, и полными; 6) деградационные отказы, являющиеся и постепенными, и частичными. Отказы компонентов могут происходить по разным причинам: из-за их неспособности работать в определенных условиях и внутренних недостатков, приводящих к отказам в установленных условиях эксплуатации. Со временем отказывают все компоненты устройства. Очевидно, что невозможно точно определить, когда какой-либо определенный компонент откажет. Поэтому изготовители устанавливают вероятность отказов. Известно несколько способов введения вероятностных характеристик надежности. Если существует вероятность возникновения отказа определенного компонента, оценить его безотказную работу можно с помощью среднего времени между отказами (mean time between failure - MTBF), которое опреде--ляется для множества идентичных компонентов следующим образом: Д/РВР= Общее время работы (в часах) Число перерывов в работе по причине отказа Если компоненты преобразователя являются невос-станавливаемыми, то вероятность появления отказов характеризуется средним временем до отказа (mean time to failure - MTTF), причем MTTF = Время до каждого отказа -f Общее время 44 . . - [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [ 13 ] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] 0.0177 |