
|
|
|
Главная страница Градуировка гидрофонов [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [ 88 ] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] 5.4. Магнитострикционные преобразователи 269 5.4. МАГНИТОСТРИКЦИОННЫЕ ПРЕОБРАЗОВАТЕЛИ Возможность применения магнитострикции в гидроакустических преобразователях, вероятно, впервые была осознана в20х годах Пайерсом и его сотрудниками в Гарварде. Магнитострикционные преобразователи широко использовались в период второй мировой войны. Исчерпывающие сведения по теории и конструированию магнитострикционных преобразователей этого периода приведены в отчете Комитета исследований в области национальной обороны [10]. Эти вопросы в общем виде также рассмотрены в литературе [И, 12]. Магнитострикционные преобразователи обладают несколькими недостатками, ограничивающими их применение в измерительных целях. Во-первых, сюда относится вид частотной характеристики чувствительности, рассмотренной ранее в разд. 5.2. К другим недостаткам этих преобразователей относится присущая им нелинейность, наличие гистерезиса и необходимость в подмагничивании. Основное преимущество их состоит в низком электрическом импедансе и высокой механической прочности. В отличие от пьезоэлектрического эффекта, магнитострикции не свойственна поляризация, т. е. механическое смещение не зависит от направления магнитного поля в металле. Например, никель, помещенный в магнитное поле, будет укорачиваться независимо от полярности этого поля. Рис. 5.6 иллюстрирует присущую магнитострикционным преобразователям нелинейность и необходимость в подмагничивании для избежания удвоения частоты. Поскольку два типа магнитострикционных преобразователей все же в некоторых случаях применяются в качестве измерительных, следует кратко о них упомянуть. Один из этих преобразователей представляет собой толстостенный цилиндр, набранный из тонких никелевых .пластин кольцеобразной формы, с тороидально намотанной катушкой [13, 14]. Остаточный магнетизм обеспечивает магнитное смещение. Преобразователь другого типа, в виде тонкостенной трубки, разработан Гидроакустической лабораторией ВМС в Нью-Лон-доне (штат Коннектикут) [10]. Внутри трубки помещается постоянный стержневой магнит и катушка провода, намотанного на деревянный стержень. В магнитострикционных трубках или цилиндрах, так же как и в соответствующих пьезоэлектрических элементах, под воздействием звукового давления в воде механическое напряжение в стенках возрастает пропорционально отношению радиуса трубки к толщине стенки. Недостатком таких преобразователей является то, что, хотя теоретически они считаются ненаправленными в одной плоскости, на практике же из-за сложности размещения и герметизации никелевой трубки или цилиндра, магнита, катушки и т. д. достигнуть этого довольно сложно. Трубчатые преобразователи использовались на кораблях ВМС для контрольной поверки гидроакустических станций. В последнее время они заменены керамикой. 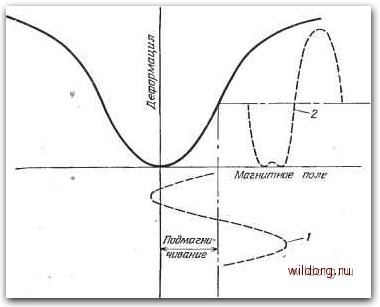 Рис. 5.6. Деформация, вызванная магнитостривдией, в зависимости от приложенного магнитного поля, i - синусоидальный входной сигнал, 2 -искаженный выходной сигнал. 5.5. ЭЛЕКТРОДИНАМИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ Электродинамический преобразователь, или преобразователь с подвижной катушкой, применяемый в подводной акустике, в принципе не отличается от обычного громкоговорителя, работающего в воздушной среде; как и громкоговоритель, он используется прежде всего в качестве широкополосного источника звука. В обоих средах для получения высококачественного воспроизведения или плоской частотной характеристики чувствительности преобразователя в режиме излучения применим метод Райса-Келлога [15], который обосновывает работу в диапазоне частот выше резонанса преобразователя. Из хорошо известных уравнений преобразования энергии электродинамическими преобразователями, из определения механического импеданса и излучения звука малой диафрагмой, движущейся В поршневой моде, видно, что на этих частотах чувствительность преобразователя по току в режиме излучения постоянна: .F=BLi, (5.6) F=juimu, (5.7) рг--чш, (5.8) где i электрический ток; F - сила, В - магнитная индукция; L - длина проводника, пересекающего под прямым углом магнитные силовые линии с плотностью потока В; м - круговая частота; т - суммарная масса катушки, диафрагмы и присоединенной массы; и - линейная колебательная скорость катушки и диафрагмы; р - излучаемое звуковое давление. Используя все три условия, мы можем написать, что Эти уравнения справедливы только тогда, когда значения и механического и акустического импедансов определяются массой, а диафрагма преобразователя мала по сравнению с длиной волны. Механический импеданс определяется массой на частотах выше основного резонанса массы подвески и ниже резонанса изгибных колебаний диафрагмы. Акустический импеданс или импеданс излучения на частотах, при которых размеры диафрагмы малы по сравнению с длиной волны в воде, является, как правило, инерционным сопротивлением массы. Вопросы применимости к гидроакустическим преобразователям метода Раиса-Келлога подробнее рассмотрены Симсом [16]. Для излучения акустической мощности на низких частотах необходимы большие объемные смещения диафрагмы. При жесткости, присущей пьезоэлектрическим или магнитострикционным преобразователям, это трудно сделать, не прибегая к значительному увеличению их размеров, при которых за счет большой излучающей поверхности можно восполнить весьма малые линейные смещения. В электродинамическом преобразователе вся жесткость сосредоточена в упругой подвеске диафрагмы, которую можно сделать достаточно мягкой. Это обстоятельство свидетельствует о дополнительном преимуществе использования электродинамических преобразователей на низких частотах, но оно также свидетельствует об их малой механической прочности. Поэтому электродинамические преобразователи имеют устройство автоматической компенсации наружного гидростатического давления противодавлением газа внутри преобразователя. Для умеренных глубин (до 30 м) используется устройство типа складной подушки (см. рис. 5.37). При больших глубинах применяется механизм, подобный тому, какой применяется в аквалангах. Однако даже с исправно работающей системой [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [ 88 ] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] 0.0195 |