
|
|
|
Главная страница Градуировка гидрофонов [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [ 70 ] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] 3. Bobber R. J., Interference Versus Frequency in Measurements in a Shallow Lake, J. Acoust. Soc. Am., 33, 1211 (1961). 4. Stenzet H., Leitfaden zur Berechnung von Schallvorgangen, Springer, 1939. English translation by A. R. Stickley, Handbook for the CalcuJation of Sound Propagation Phenomena, Naval Res. Lab. Translation № 130. 5. Sonar Calibration Methods, Summary Technical Report of NDRC Div. 6, Vol. 10. 6. American Standard Procedures for Calibration of Electroacoustic Transducers, Particularly Those for Use in Water, Z24.24-1957, USA Standards Institute, New York. 7. Bukmore R. W., Hansen R. C, Antenna Power Densities in the Fresnel Region, Proc. IRE, 47, 2119 (1959). 8. Sabin G. A., Calibartion of Piston Transducers at Marginal Test Distances, J. Acoust. Soc. Am., 36, 168 (1964). 9. Bobber R. J., Sabin G. A., Cylindrical Wave Reciprocity Parameter, J. Acoust. Soc. Am., 33, 446 (1961). 10. Yamada K., Acoustic Response of a Rectangular Receiver to a Rectangular Source, Papers of Ship Research Institute (Tokyo) № 20, June 1967. 11. Owsley O. M., Testing Devices for Sound Projectors, U. S. Patent № 2,451,509, filed 5 July 1944. 12. Goldman S., Frequency Analysis, Modulation and Noise, McGraw-Hill Book Co., New York, 1948. 13. Cherry С Pulses and Transients in Communication Circuits, Dover Publ., New York, 1950. 14. Davie O. H., The Elements of Pulse Techniques, Reinhold Publ. Corporation, New York, 1964. 15. Ford R. E., Stoops C. W., The Measurement of Impedance at High Power, Naval Res. Lab. Rep. № 6631, 27 Oct. 1967. 16. The Physics of Sound ш the Sea, Summary Technical Report of NDRC,. Div. 6, Vol. 8, Chap. 28, Acoustic Theory of Bubbles. 17. Darner C. L., An Anechoic Tank for Underwater Sound Measurements Under High Hydrostatic Pressures, J. Acoust. Soc. Am., 26, 221 (1954). 18. Wallace J. D., McMorrow E. W., Sonar Transducer Pulse Calibration System, J. Acoust. Soc. Am., 33, 75 (1961). 19. Green C. E., Roshon J. R., Sonar Calibration in a Controlled Pressure-Temperature Environment, J. Acoust. Soc. Am., 42, 1188(A) (1967). 20. Green C. E., Pressure/Temperature Vessels for Calibrating Sonar Transducers, Naval Undersea Warfare Center Report TP45, May 1968. 21. Roshon J., Electroacoustic Transducer Calibration Combined with Semiautomatic Data Reduction, J. Acoust. Soc. Am., 32, 1519(A) (1960). См. также Naval Electronics Laboratory Technical Memorandum TM-469 of 18 Apr. 1961. 22. Wathen-Dunn W., On the Reciprocity Free-Field Calibration of Microphones, J. Acoust. Soc. Am., 21, 542 (1949). 23. Bobber R. J., General Reciprocity Parameter, J. Acoust. Soc. Am., 39, 680 24. Trott W. J., International Standardization in Underwater Sound Measurements, Acustica, 20, 169 (1968). 4.1. ВВЕДЕНИЕ Нижняя граница диапазона частот, в котором можно успешно произвести градуировку, испытания или оценочные измерения в малом объеме воды, вообще говоря, зависит от минимального возможного расстояния между преобразователями, критерии которого рассматривались в разд. 3.4. Эти критерии показывают, что, когда диаметр или длина преобразователя достигают нескольких длин волн, минимальное допустимое расстояние между излучателем и приемником должно быть значительно больше длины волны. На частотах в несколько килогерц это расстояние становится очень большим, поэтому в значительной степени сказывается влияние помех от границ, что иллюстрирует рис. 3.29. В разд. 3.4 указывалось также, что, независимо от того, проводятся измерения в непрерывном или импульсном режимах, наименьшее измерительное расстояние целесообразно использовать для минимизации влияния отражений от границ. В конце 50-х годов стало очевидным, что небольшие озера, пруды и бассейны, где ВМС проводили измерения, в связи с переходом на частоты порядка нескольких килогерц и появлением больших преобразователей начали истощать свои пространственные возможности (в длинах волн). Чтобы продолжать измерения в дальнем поле обычными методами, потребовались бы очень большие объемы воды и очень громоздкое дорогостоящее оборудован ие. Единственной альтернативой могла бы явиться разработка методики измерений, которая позволила бы изменить или совсем отказаться от требований производить градуировку преобразователей в дальней зоне свободного поля. Например, если бы можно было производить измерения в ближнем поле, или в зоне Френеля, преобразователя и экстраполировать результаты для получения диаграммы направленности и чувствительности в дальнем поле, то это в значительной степени сэкономило бы место и деньги. Основы математической теории для экстраполяции данных ближнего поля на условия дальнего поля в литературе в какой-то степени изложены [1-4], но на практике они применения не нашли. В 1958 г. Лаборатория гидроакустических измерений ВМС (USRL) обратилась с просьбой к Управлению на- МЕТОДЫ БЛИЖНЕГО ПОЛЯ 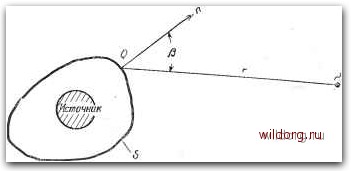 % Р и с. 4.1. Поверхность интегрирования для формулы Гельмгольца. Ь верхности S, то давление р (Р) в любой точке Р, лежащей вне. S, может быть определено поверхностным интегралом: <s где p(Q) -комплексная амплитуда давления в точке Q на поверхности S, п - внешняя нормаль к поверхности S в точке. д/дп обозначает дифференцирование в направлении нормали, / - расстояние от Q до Р, k - волновое число. Уравнение (4.1),. известное как формула Гельмгольца, справедливо только для. >• случая синусоидальных волн. учных исследований ВМС заключить контракт с каким-либо-университетом о проведении исследований с целью обобщения и применения этих математических принципов для решения стоящих перед ВМС реальных проблем по градуировке, испытаниям и оценочным измерениям больших преобразователей гидроакустических станций. В 1959 г. Хортон, Инис и Бейкер в Лаборатории оборонных исследований Техасского университета (DRL) приступили к решению этой задачи. Одновременно в Лаборатории гидроакустических измерений Тротт продолжал всесторонне исследовать ту же проблему и в конечном счете создал антенную решетку, в ближнем поле которой имеется область существования однородных плоских бегущих волн. Эти два разных подхода к решению проблемы стали называть 1) методом DRL и 2) решеткой Тротта. Оба метода получили признание и рассматриваются по отдельности в последующих разделах. 4.2. ТЕОРИЯ МЕТОДА DRL В основу метода DRL положены формулы Кирхгофа и Гельмгольца [5-7]. Идею его можно понять из рассмотрения рис. 4.1. Если источник звука находится внутри замкнутой по- [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [ 70 ] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] 0.013 |