
|
|
|
Главная страница Микропроцессоры [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [ 52 ] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] Центральный процессор Оперативное запоминающее устройство Постоянное запоминающее устройство 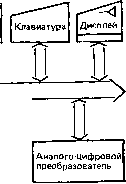 Системный интерфейс (Общая шина 1 ж::-
Рис. 9.3. Структурная схема измерителя параметров компонентов схем В очень широком диапазоне, например от 10 до 18 Гц. Синтезатор частот преобразует сигнал с фиксированным значением частоты, вырабатываемый высокостабильным источником, в сигнал, дискретные значения частоты которого устанавливаются с требуемым шагом в определенном диапазоне частот. В схеме частотомера переход от одного значения частоты к другому осуществляет микропроцессорная система. Она же запоминает результат и вычисляет номер гармоники. Мостовой измеритель параметров (Rx) компонентов электронных схем предназначен для измерения индуктивности катушки, емкости конденсатора, сопротивления резистора и добротности колебательного контура с автоматическим переключением пределов измерений и автоматической подстройкой. После включения прибора микропроцессор производит опрос клавиатуры передней панели, включает измерительный генератор и устанавливает указанное соответствующей клавишей значение частоты его выходного сигнала, подводимого к одной диагонали мостовой схемы, считывает программу, хранимую в постоянном запоминающем устройстве и определяющую последовательность операций. Если мостовая схема оказывается раз-балансированной, то на второй ее диагонали возникает напряжение разбаланса. Оно преобразуется в напряже- ние постоянного тока и поступает в МПС в виде числового эквивалента напряжения. МПС регулирует мосто-вую схему, доводит измеряемые параметры до состояния баланса, после чего проводит необходимые вычисления для получения результата измерения, преобразует его в «дисплейный формат» и выводит на дисплей. Важной чертой микропроцессорного мостового измерителя является автоматическое определение погрешности, создаваемой остаточным сопротивлением и индуктивностью выводов используемого компонента. Самым распространенным элементом контрольно-измерительных приборов являются коммутатор, усилитель, фиксатор. Коммутаторы служат для принятия сигналов, поступающих от датчиков. Он выполняется или на герметизированных реле, или на К-МОП-структурах. К входу коммутатора подводится напряжение постоянного тока, падающее на сопротивление в токовой цепи или на мосте. Управление входным коммутатором обеспечивается разницей во времени между разрывом цепи одного сигнала и возникновением другого. Это исключает возможность наложения сигналов. Усилители предназначены для повышения входного сигнала до уровня шкалы на входе аналого-цифрового преобразователя. Эти устройства представляют собой двухкаскадные операционные усилители на одном кристалле. Коэффициент усиления должен изменяться постепенно, ступенями, путем задания управляющего слова микроэвм. Поэтому можно устанавливать свой коэффициент усиления и шкалу для каждой переменной. Фиксаторы предназначены для сохранения стабильности сигнала в течение всего периода цифрового преобразования. Применение микротехники позволяет в любой области создавать «интеллектуальные» приборы, например осциллограф. Наблюдаемое на его экране изображение представляет собой иллюстрацию какого-либо процесса. Оператор, следя за изображением, видит нежелательное отклонение от нормы. Для приведения кривой осциллографа в нормальное положение необходимо повернуть ручку прибора. При этом необходимо определить, в какую сторону и на сколько градусов ее повернуть. Именно здесь возникают ошибки; процесс наладки идет эмпирическим путем. Применение микропроцессора в таком приборе позволит на экране осциллографа указать не только величину отклонения, но и направление регулировки. Кроме того, присоединение аналоговой системы сравнения позволит выдать управляющий сигнал по регулировке, который, поступив на исполнительный механизм, откорректирует процесс. Фотолюбители знают, как сложно производить съемку различных объектов с учетом освещенности, удаленности, размера и т. п. Все эти параметры могут устанавливаться автоматически, если в фотоаппарат встроена микропроцессорная схема, контролирующая их. Принцип сравнения параметров может использоваться и в устройствах, предназначенных для контроля качества приборов. Исследование электронных приборов производится путем сверки входных и выходных сигналов. В память микропроцессора можно записать эталонные (нормативные) соотношения, по сравнению с которыми можно индицировать отклонения от нормы. Контрольно-измерительная и регистрирующая аппаратура в составе АСУ ТП. Она выполняет функцию связи АСУ ТП с технологическим процессом. Для этого на различных стадиях технологического процесса установлены датчики, которые связаны с местным преобразователем сигнала, служащим только для получения унифицированного токового сигнала или для выполнения функции измерительного преобразователя (линеаризация и масштабирование сигнала). Датчики переменного тока обычно соединяются с устройством обработки четырьмя проводами: по двум на датчик передается напряжение переменного тока для питания, по двум другим снимается сигнал измерения. Сигнал измерения преобразуется для ввода в микроЭВМ. Операциями ввода-вывода управляет микроЭВМ, посылая коды адреса по адресной шине и коды управления по управляющей шине. Код адреса и код управления через адресный регистр коммутатора поступают в устройство декодирования адреса, которое задает коэффициенты усиления и коэффициенты линеаризации в усилителе, а также управляет работой фиксатора, аналогового преобразователя и выходного регистра. При восприятии информации одной из наиболее важных проблем является ликвидация помех. При большой вероятности их возникновения используются индивидуальные аналого-цифровые преобразователи. Одним из направлений развития АСУ ТП является замена контроллеров микроконтроллерами, основой ко- [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [ 52 ] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] 0.009 |
|||||||||||||||||