
|
|
|
Главная страница Измерения влажности [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [ 41 ] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] Мосты с тесной индуктивной связью плеч имеют близкий к единице коэффициент связи между обмотками, образующими индуктивные плечи. Это достигается размещением их на общем сердечнике из материала с высокой магнитной проницаемостью и малыми потерями (например, феррита).. Главным . достоинством таких мостов является ничтожно малое влияние паразитных проводимостей, шунтирующих элементы мостовой схемы. Из различных известных мостовых схем с индуктивно связанными плечами рассмотрим схему шестиплечего моста для измерения емкостной составляющей комплекс- 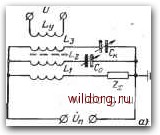 Рис. 4-11. Схемы моста с иаду.ктивво связанными плечами (а) и автоматического влагомера (б). / - генератор высокой частоты; 2 - мостовая схема; 3 - уравновешивающий конденсатор; 4 - усилитель высокой частоты; 5 - амплитудный детектор; 6 - реверсивный двигатель; 7 - усилитель низкой частоты; 8 - блок питания; 9 - модулятор. ного сопротивления Zx датчика, примененную во влагомерах, разработанных Институтом автоматики АН Киргизской ССР (рис. 4-11,а) [Л. 4-13,0]. Плечи моста образованы полным сопротивлением датчика Z, емкостями - образцовой Со (измерительный конденсатор) и переменной Си, а также уложенными на ферритовом кольце обмотками Li, L2 (плечи отношения), и L3; емкость Ch совместно с индуктивностью L3 используется для наст1ройки влагомера. Напряжение питания if/n подается на диагональ моста, а выходное напряжение бвых снимается с обмотки Ly. Для уравновешивания моста в схеме влагомера предусмотрены модуляция емкости и амплитудное детектирование. 126 Выходное напряжение разбаланса моста О вых, модулированное частотой 50 гц, детектируется амплитудным детектором. Выделенная детектором модуляционная огибающая Овых поступает на фазовый детектрр,- опорное напряжение которого синфазно с модуляционным воздействием (опорное напряжение фазового детектора и управляющее напряжение модулятора поступают с трансформатора питания). В этих условиях изменения активной составляющей комплексного сопротивления датчика практически не оказывают вл1ияния на равновесие моста; влияние этой составляющей ограничивается лишь изме- • пением чувствительности схемы при измерении реактивной составляющей. Описанные схемы использованы в лабораторном и автоматическом влагомерах. В первом имеется стрелочный указатель равновесия моста; модулятором служит транзистарный ключ, периодически подключающий по- стоянную емкость параллельно измерительному конденсатору. У аналогового автоматического влагомера {Л. 4-136] (рис. 4-11,6) выделенная амплитудным детектором огибающая напряжения разбаланса моста после усиления используется в качестве сигнала управления реверсивным асинхронным двухфазным двигателем. Двигатель вращает ротор конденсатора переменной емкости, уравновешивающего мостовую схему. Большим практическим достоинством рассмотренных схем является возможность отнесения датчика на значительное расстояние от прибора и минимизация влияния параметров соединительного кабеля на результаты измерения. Это достигается трехточечной схемой включения датчика в мост. К недостаткам следует отнести ограниченность верхнего предела рабочей частоты; в описанных влагомерах она равна ПО кгц. Вторая группа измерительных устройств основана на рассмотренных в первой части этого параграфа схемах, в которых- дополнительно предусмотрены те или иные способы компенсации активной составляющей полного сопротивления. П. М. Плакк [Л. 4-14] использовал двухполюсник, состоящий из последовательно включенных индуктивности L и емкости С, шунтированной активным сопротивлением R. Если реактивные элементы связаны соотношением cuLC=1/2, то модуль полного сопротивления -(Z=1/2cuC=.cuL) не зависит от величины сопротивления R. Измерение емкости сводится к применению схемы сравнения двух напряжений - на индуктивности L и на двухполюснике в целом. Этот способ применялся для измерения влажности материалов с большими потерями, например торфа. Более распространены резонансные схемы на принципе замещения, у которых в измерительный резонансный контур вводятся переменные активные сопротивления, позволяющие уравновесить активную составляющую измеряемого полного сопротивления. Контур настраивается в резонанс с введенным датчиком, который затем замещают переменным образцовым конденсатором и переменным активным сопротивлением. Этот .способ в различных видоизменениях применяется во многих резонансных схемах. Для введения потерь в колебательный контур необходимы практически безреактивные (безъемкостные и безындуктивпые) переменные сопротивления, активное сопротивление которых не зависит от частоты (в пределах ее изменений в схеме). Такие сопротивления достаточно трудно осуществить. Одно из простейших решений этой задачи заключается в использовании диода с катодной нагрузкой (переменный резистор г, шунтированный емкостью). Такую схему можно при.менять для частот до 100 Мгц и выше. Ее активное сопротивление является функцией переменного сопротивления г. Развитием описанного метода является схема, основанная на низкочастотной (чаще всего частотой 50 гц), модуляции параметров, например емкости измерительного параллельного колебательного контура, питаемого током фиксированной частоты. При настройке контура в резо--нанс модуль его полной проводимости принимает постоянное значение, а выходное напряжение становится.равным нулю. Так как условие резонанса не зависит от активного сопротивления датчика, методом замещения можно определить его «чистую» емкость по изменению параметров уравновешивающего элемента. Указанный способ был реализован Л. В. Каменевым [Л. 4-15] всхемах с автоматическим уравновешиванием. Демодулированный низкочастотный выходной сигнал контура управляет фазочувствительной следящей системой, приводящей контур в состояние резонанса. В первом варианте схемы исполнительный электродвигатель следящей системы управляет конденсатором переменной емкости, включенным в контур параллельно датчику. Во [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [ 41 ] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] 0.0375 |