
|
|
|
Главная страница Проектирование станочных приспособлений [0] [1] [2] [3] [4] [5] [6] [7] [8] [ 9 ] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] Здесь а - угол наклона рычага усилителя; р - дополнительный угол к углу а, учитывающий трение в шарнирах рычагов р = = агс sin f{d/D); f=0,l - коэффициент трения; d - диаметр оси ролика, мм; D - наружный диаметр ролика, мм; Di-диаметр поршня пневмоцилиндра, мм, tgT„p = tgcp(cf/D); ёФ=/ = 01 - коэффициент трения на опорной поверхности ролика; / и /i-длины плеч рычага, мм; т] - коэффициент, учитывающий трение в различных трущихся соединениях; IF -сила зажима об-ц к 5 7 рабатываемой детали, Н (кгс); IFi -сила, действующая на оси рычага, Н (кгс); Q -исходная сила на штоке пневмоцилиндра, Н (кгс). На рис. III.18, а дана схема пневматического заж;има с рычажным механизмом - усилителем. При подаче сжатого воздуха в бесштоковую полость пневмоцилиндра поршень 2 со штоком / перемещается вверх и шток поворачивает рычаг 7 около оси 6. Во время поворота рычаг 7 коротким плечом перемещает стерж;ень 3 с прихватом 4 вправо и прихват коротким плечом зажимает деталь 5. При подаче сжатого воздуха в штоковую полость пневмоцилиндра поршень со штоком перемещается вниз и поворачивает рычаг 7 около оси 6 по часовой стрелке. В Рис. III.18. Конструктивные схемы рычажных этом случае короткое пле-шарнирных усилителей зажимных устройств с чо рычага перемещает пневмоприводом стержень 3 влево, а его головка перестает нажимать на прихват 4 и деталь 5 разжимается. Пружина на стержне 3 отжимает прихват 4 влево для удобства установки и съема деталей в приспособление. Сила зажима детали и сила на штоке (рис. III.18, а): Qo=W l + h 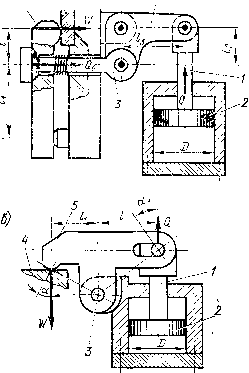 h l + h Здесь Q - исходная сила на штоке пневмопривода, Н(кгс); /2 и/з - длины плеч рычага усилителя, мм; I и /[ - длины плеч прихвата, мм; Т1 = 0,9 -коэффициент, учитывающий потери на трение в пнев-моцилиндре; Qq-сила, действующая вдоль оси стержня 3, Н(кгс). На рис. III.18, б дана схема пневматического з ч зажима с рычажным механизмом. При подаче сжатого воздуха в бесштоковую полость пневмоцилиндра поршень 2 со штоком 1 перемещается вверх и поворачивает рычаг 5 около оси 3 против часовой стрелки и он левым плечом зажимает деталь 4. Во время подачи сжатого воздуха в штоковую полость пневмоцилиндра поршень 2 со штоком ) перемещается вниз и поворачивает рычаг 5 около оси 3 по часовой стрелке. При этом короткое плечо рычага 5 поднимается и деталь 4 разжимается. Сила зажима детали (рис. III.18, б) 1=С(/Л)Л, где I и h - длины плеч рычага, мм; 11 = 0,95 - коэффициент, учитывающий трение в пневмоцилиндре. На рис. III. 19, а дана схема зажимного устройства с пневмоприводом и двухрычажным шарнирным усилителем одностороннего действия с плунжером. При подаче сжатого воздуха в бесштоковую полость пневмокамеры мембрана 1 прогибается и перемещает диск со штоком 2 вверх, шток при этом поворачивает на осях рычаг 5, левое плечо которого, перемещая плунжер 4 влево, зажимает деталь 3. Во время подачи сжатого воздуха в штоковую полость пневмокамеры мембрана 1 прогибается и перемещает диск со штоком 2 вниз. Концы рычагов 5, шарнирно закрепленных на оси штока 2, также опускаются и левое плечо рычага отводит плунжер 4 от детали 3 и она разжимается. 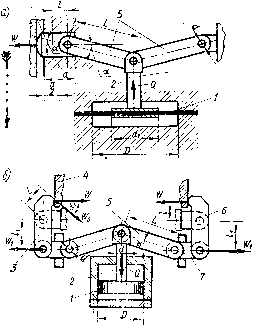 Рис. 111.19. Конструктивные схемы двухрычажных зажимных устройств с пневмоприводом: а - с двухрычажным шарнирным усилителем одностороннего действия с плунжером; б - с двухрычажным шарнирным механизмом-усилителем двустороннего действия без плунжера Сила зажима детали и осевая сила на штоке (рис. 11.19, а): 2 Ltg(a + P) tgcp3 tg(a + p) - tg?3 Здесь L - длина рычага усилителя, мм; 15фзпр - приведенный коэффициент трения, учитывающий потери на трение в консольном (перекошенном) плунжере, tg<P3np=tgcp3 (3 а), где tgфз л: 0,1 - коэффициент трения скольжения в двухопорном (неперекошенном) плунжере; / - расстояние между осью шарнира и серединой направляющей плунжера, мм; а -длина направляющей плунжера, мм; аяйО,?. На рис. П1.19, б приведена схема зажимного устройства с пневмоприводом с двухрычажным шарнирным механизмом-усилителем двустороннего действия без плунжера. При подаче сжатого воздуха в штоковую полость пневмоцилиндра поршень / со штоком 2 перемещается вниз. В это время шток 2 опускает концы рычагов 5, шарнирно закрепленных на оси штока. Перемещаясь, рычаги 5 через рычаги 7 поворачивают прихваты 3 около осей 6, и прихваты короткими плечами зажимают детали 4. При подаче сжатого воздуха е бесштоковую полость пневмоцилиндра поршень 1 со штоком 2 перемещается вверх и концы рычагов 5, шарнирно закрепленных на оси штока 2, через рычаги 7 поворачивают прихваты 3 около осей 6 в направлении разжима деталей 4. Сила зажима детали и осевая сила на штоке цилиндра (рис. П1.19, б): .An; Q=2\F3.tg(a-fW-; 2fg(a + l Q=2ritg(a + p). Здесь / и li-длины плеч прихвата, мм; L - длина рычагов усилителей, мм; т) = 0,9 -коэффициент, учитывающий трение в пневмо-цилиндре; Q - исходная сила на штоке пневмоцилиндра, Н(кгс); а -угол наклона рычагов усилителей, град; р -дополнительный угол к углу наклона а, учитывающий потери на трение скольжения в шарнирах, град. * Клиновые механизмы. В станочных приспособлениях применяют клиповые механизмы с односкосым клином без роликов, с роликами и многоклиновые самоцентрирующне механизмы. Механизмы с односкосым клином без роликов и с роликами применяют в качестве усилителей пневмо- и гидроприводов. Многоклиновые самоцентрирующие механизмы используют в конструкциях патронов, оправок и т. д. Клиновые механизмы-усилители. На рис. П1.20 показан клиновой механизм-усилитель с плоским односкосым клином 1, служа- щий для увеличения исходной силы Q привода приспособления. Шток механизированного привода развивает исходную силу Q; перемещаясь, он нажимает на односкосый клип и создает вертикальную силу зажима W на наклонной поверхности аЬ. Силе зажима W противодействует нормальная сила реакции N на наклонной плоскости клина и силы трения Fi, F2, направленные в сторону, противоположную действию силы Q. Рассматривая клин при закреплении детали в приспособлении в состоянии равновесия, найдем соотношение между исходной силой Q и силой зажима W без учета трения в направляющих подвижного звена, перемещаемого наклонной плоскостью клина. Заменим силы N и Fi их равнодействующей Ri, разложим силу R) на составляющие силы W и Р. При условии равновесия клина с трением на двух поверхностях аЬ и cd клина находим, что две вертикальные силы зажима W взаимно уравновешиваются, а исходная сила Q на штоке цилиндра уравновешивается силами Р и Fz] следовательно, Q = P + F2. 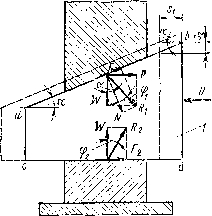 Из треугольника сил находим Рис. III.20. Клиновой механизм (зажим)-усилитель с плоским односкосым клином откуда Подставим найденны? значения Р и Fz в равенство для силы Qt Q=[tg(a-fcpi)-ftgcp2], W=Q/Itg(a+?i)-ftgcpi.]. Для клинового механизма при условии трения только на наклонной плоскости клина 15ф2 = 0, тогда сила зажима =Q/tg (а+ cpi). Здесь а -угол наклона рабочей поверхности аЬ клина; ф!-угол трения скольжения на наклонной плоскости аЬ клина- ф2 -угол трения скольжения на горизонтальной плоскости cd клина-tgffi,= =/1 - коэффициент трения скольжения на наклонной плоскости клина; tgф2=/2 -коэффициент трения скольжения на горизонтальной плоскости клина. Отношение силы зажима Wk исходной силе Q на штоке привода является передаточным отношением сил: /e=r/Q=l,[tg(a+cpi) + tgcp2]. Перемещение $2 по вертикали точки приложения силы зажима W к перемещению sj по горизонтали точки приложения исходной силы Q называют передаточным отношением перемещений сил: 4=52/5i=tga; S2=sitga. Самоторможение клина при трении на двух его поверхностях определяется неравенством аф1 + фг. 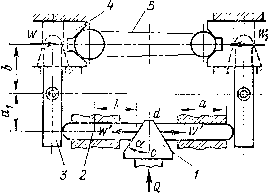
Рис. III.21. Схема комбинированного усилите-Рис. III.22. Многоклиновый цанго-ля из клиноплунжерного и рычажного меха- вый механизм (зажим) низмов-усилителей для зажима детали Приняв углы трения на рабочих поверхностях клина одинаковыми (ф1=ф2 = ф), получим неравенство а2ф. Для сопряженных стальных поверхностей клина и детали коэффициент трения скольжения / = lgф = 0,l, что соответствует углу трения ф = 5°43. В этом случае условие самоторможения клина при трении на двух его поверхностях будет при угле наклона поверхности клина а1Г. На рис. П1.21 показан клиноплунжерный механизм-усилитель с двускосым клином 1, который через плунжеры 2, рычаги 3 и призмы 4 зажимает шатун 5. Клин / имеет равные углы наклона а и передает на плунжеры 2 одинаковые силы зажима W. Он представляет собой как бы два соединенных вместе односкосых клина. Поэтому все выводы, относящиеся к односкосому клину, действительны и для двускосого клина с небольшой поправкой на отсутствие силы трения р2 (так как ф2 = 0) на основании cd клина. Для клиноплунжерного механизма-усилителя сила зажима детали [Н(кгс)] \V=QiJ,2, W = W,Jn. Передаточные отношения сил: / l-tg(a+yi)tgy3„p Q tg(a-f-?i) Здесь Q - исходная сила на штоке механизированного привода, Н(кгс); гс! - передаточное отношение клиноплунжерного механизма-усилителя; tc2-передаточное отношение сил для плеч рычагов первого рода; IF -осевые силы плунжеров, Н(кгс); п = 2 -число плунжеров; щ и 6 -длины плеч рычагов первого рода, мм; а - длина направляющей втулки плунжера, мм; / - расстояние между точкой приложения силы W н серединой втулки, мм; В многоклиновых самоцентрирующих механизмах, например цанговых и клиновых патронах, клиновых оправках, все клинья зажимают детали с одинаковой силой. Каждый клин многоклиновых самоцектрирующих механизмов, перемещающийся по конической поверхности сопрягаемой детали приспособления, работает как односкосый клин с трением только по одной пли по двум рабочим поверхностям клина. На рис. П1.22 показан многоклиновый самоцентрирующий цанговый механизм (зажимное устройство) с упором / для прутка 2. В этом механизме каждый лепесток цанги (клика) при зажиме прутка 2, перемещаясь по неподвижной конической поверхности, работает как односкосый клин и преодолевает силы трения Fi яр2 по двум его рабочим поверхностям. Если в многоклиновом цанговом механизме упора 1 нет, то каждый лепесток 3 цанги при зажиме прутка 2, перемещаясь по неподвижной наклонной поверхности аЬ, работает как односкосый клин и преодолевает только силу трения Fi по одной его рабочей поверхности (сила р2 = 0). Суммарная сила зажима детали всеми лепестками 3 цанги при трении только по наклонным поверхностям аЬ (рис. П1.22) McyM = Q;tg(a + cp,). Суммарная сила зажима детали всеми лепестками 3 цанги при трении по двум ее рабочим поверхностям Сила зажима детали каждым лепестком цанги где п -число лепестков в цанговом механизме (зажиме). На рис. П1.23, а показана схема клинового механизма с односкосым клином 1 и двумя роликами: верхним 5, перемещающимся с плунжером 4 вверх при зажиме обрабатываемой детали, и нижним 2 - опорным. В этом клиновом механизме схема взаимодействия сил между клином / и роликами 2 я 3 такая же, как в клиновом механизме, представленном на рис. П1.20, но поскольку клин / передает силу зажима не плоским поверхностям, а вращающимся роликам 2 и 5, то в формулу для определения силы зажима W [0] [1] [2] [3] [4] [5] [6] [7] [8] [ 9 ] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] 0.0228 |
||||||||||||||||||||