
|
|
|
Главная страница Проектирование станочных приспособлений [0] [1] [2] [3] [4] [ 5 ] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] ных направлениях; требуемая сила зажима Третий вариант (рис. III.1, е). Сила зажима W и сила резания Р действуют на обрабатываемую деталь во взаимно перпендикулярном направлении. Силе резания Р противодействуют силы трения между нижней базовой плоскостью детали и опорными штырями приспособления и между верхней плоскостью детали и зажимными элементами. При этом требуемая сила зажима откуда W=KPXMf2\ где fi и I2 - коэффициенты трения между деталью и установочными зажимными элементами приспособления. При fi=/2=0,l сила зажима W=b КР. Четвертый вариант (рис. III.1, г). Сила зажима W прижимает деталь к опорам, при этом одна сила резания имеет одно направление с силой зажима и прижимает деталь к нижним опорам, а вторая сила резания Р2 действует в направлении, перпендикулярном силе зажима. Смещению детали в приспособлении препятствуют силы трения, возникающие на плоскостях контакта детали с установочными и зажимными элементами приспособления. Величину силы зажима определяют из соотношения P2<(VF + Pl)/2+Vr/i, а с учетом коэффициента запаса (/С>1) w={KP2-Pimfi+f2). Пятый вариант (рис. III.1, д, е). Обрабатываемая деталь зажимается горизонтально действующей силой зажима W. Расстояние между силой зажима и силой реакции от бокового упора выбирают таким, чтобы обрабатываемая деталь надежно была прижата к установочным опорам приспособления. На деталь, зажатую в приспособлении, действуют сила зажима W, силы реакции Ri и R от установочных и зажимных опор и силы трения F, Fi и F2 между поверхностями детали, установочными и зажимными элементами приспособления. Приравнивая сумму моментов относительно точки О нулю, найдем силу W = [R,{b + U)]/{a-f2e). Шестой вариант (рис. III.1, д, е). При обработке детали фрезой на нее действуют силы резания Pi и Рг. Величину силы зажима с учетом сил резания найдем, приравнивая сумму моментов всех сил относительно точки О нулю: откуда WaW fj. - КР2е - KPil ==0, W=\K{P2ePM{( + f2l), где /С -коэффициент запаса. Седьмой вариант (рис. III. 1, дас). Обрабатываемую деталь выточкой устанавливают на центрирующий жесткий палец приспособления и левой плоскостью прижимают к трем опорным штырям несколькими прихватами. При обработке на деталь действуют сдвигающий момент М и осевая сила Р. Обрабатываемая деталь удерживается от смещения силами трения, возникающими между поверхностями установочных и зажимных элементов приспособления. В этом случае силу зажима W определяют из равенства /Ж =/iU/r2 + Г1 +/2ЯГ1, откуда WiKM- /2РГЖ/1Г2 + /2Г,). При той же установке, но небольшой тангенциальной жесткости зажима, силы трения между деталью и прихватом не учитываются: /СЖ = /2\ГГ1 + /2ЯГ1, откуда W[KM-f,Pr,)l[f2ri). Восьмой вариант (рис. III.1, з). Обрабатываемая деталь наружной цилиндрической поверхностью установлена в призме с углом а = 90° и залата силой W. Повороту детали около ее оси противодействуют силы трения, возникающие на поверхностях контакта детали с установочными и зажимными элементами приспособления. Без учета трения на торце детали KM=WЛг + /2Г[l/sin (а/2)], откуда fir + f2rjs\n (а/2) Девятый вариант (рис. III.2, а). Рассмотрим действие двух сил резания Рг и Рх на обрабатываемую деталь 1, залатую в трехкулачковом патроне станка; сила резания Рг создает момент который стремится повернуть обрабатываемую деталь вокруг ее оси, а сила Р» -переместить обрабатываемую деталь вдоль ее оси. Суммарная сила зажима обрабатываемой детали тремя кулачками патрона откуда W, = KMJ(fr) = KPrd{fr), 2* 35 где /(=1,4-2,6 -коэффициент запаса; Л1рез -момент от силы резания Рг; / - коэффициент трения между поверхностями детали и кулачков (зависит от вида поверхности кулачков); г -радиус обрабатываемой части детали, зажатой кулачками, мм; ri -радиус обработанной части детали, мм. Тогда сила зажима деталей одним кулачком патрона [Н(кгс) где Z - число кулачков патрона. Величину WcyM проверяют на возможность продольного сдвига обрабатываемой детали силой по формуле 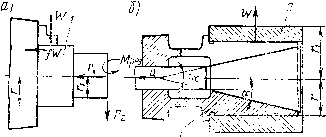 Рнс. 111.2. Различные варианты, взаимодействия сил резания и сил зажима на деталь, установленную в патроне (а) и на цанговой оправке (б) откуда Десятый вариант (рис. III.2, б). Рассмотрим действие си-лы резания Рг на обрабатываемую втулку 2, установленную и зажатую на цанговой оправке / (рис. III.2, б). Сила Рг при обработке втулки 2 создает момент резания Л1рез, которому противодействует момент от силы трения Л1тр между установочной поверхностью цанги и обрабатываемой деталью. Суммарная сила зажима WcyM обрабатываемой детали всеми лепестками цанги откуда Момент от силы трения где / - коэффициент трения между деталью и цангой. Фактические силы зажима детали, создаваемые зажимными механизмами, должны равняться расчетным силам зажима или быть несколько больше их. Величина фактических сил зажима детали зависит от величины исходной силы Q, привода передаточного отношения между фактической силой зажима детали и исходной силой Q для конкретного зажимного устройства приспособления. Зависимость между силами и Q определяется равенством откуда где 1с - передаточное отношение между силами; Q - исходная сила, развиваемая рабочим или механизированным приводом, Н (кгс); ф - фактическая сила залсима обрабатываемой детали, Н. § III.2. Зажимные устройства приспособлений Зажимные устройства приспособлений служат для зажима (закрепления) и разжима (раскрепления) деталей, обрабатываемых на станках. Эти устройства не должны изменять положение детали в приспособлении при ее закреплении и допускать ее смещение при обработке на станке. Зажимные устройства приспособлений разделяются на простые (элементарные) и комбинированные, т. е. состоящие из нескольких простых. Простые зажимные устройства (зажимы) состоят из одного элементарного зажима; они бывают клиновые, винтовые, эксцентриковые, рычажные и т. д. Комбинированные зажимные устройства состоят из нескольких простых устройств, соединенных вместе. Их изготовляют винто-эксцентрико-рычалсными и др. В зависимости от числа ведомых звеньев зажимные устройства разделяют на одно- и многозвенные. Любое зажимное устройство приспособления включает ведущее звено, на которое действуют исходная сила и несколько ведомых звеньев, кулачков или прихватов, непосредственно зажимающих детали. Многозвенные зажимные устройства зажимают одну деталь одновременно в нескольких местах или несколько деталей одновременно в многоместном приспособлении. В зависимости от источника силы, требуемой для зажима детали, зажимные устройства разделяются на ручные, механизированные и автоматизированные. Ручные зажимные устройства приводит в действие непосредственно рабочий за счет мускульной силы. Механизированные зажимные устройства работают от пневматического, гидравлического или другого привода. Автоматизированные устройства перемещаются от движущихся узлов станка, шпинделя, суппорта или патронов с кулачками, на которые действуют центробежные силы вращающихся грузов патрона. При этом зажим и разжим детали производятся без участия рабочего. Клиновой зажим. Для надежного закрепления обрабатываемой детали в приспособлении клин должен быть самотормозящийся, т. е. зажимать обрабатываемую деталь после прекращения дейст- вия на клин исходной силы Р (рис. III.3, а). Клиновые зажимы применяют в качестве промежуточного звена в сложных зажимных системах. Они позволяют увеличивать и изменять направление передаваемой силы. При расположении передаваемых сил односкосым клиновым механизмом между силами Р и Q получается зависимость, определяемая из силового многоугольника (рис. III.3, б): cos tp3 sin [g ± (tpi + cp2)] . cos <pi CCS [a ± (<P2 + <рз)] знак «--» относится x закреплению клина, a знак «-» - к откреплению его. 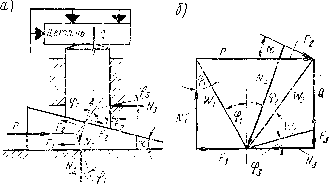 Рис. 111,3. Силы, действующие в односкосом клиновом зажиме (а), и силовой многоугольник (б) Самотормол<:ение клина обеспечивается малыми углами а наклона его поверхности и получается при а<ф1-Ьф2. На рис. III.3, б дана схема действия сил в односкосом клиповом механизме (зажиме) . Кроме исходной силы Р на клин действуют нормальные силы N[, N2 и силы трения Fi, F2 по его боковым поверхностям. Если ф1=ф2 = фз=ф, то для односкосового клина при расположении передаваемой силы под прямым углом зависимость между силами Р и Q выражается формулой P=Qtg(a + 2tp). Клиновые зажимы применяют в приспособлениях в сочетаниях с другими элементарными зажимами. Рычажный зажим. Для определения соотношения между исходной силой Q механизированного привода и силой зажима W детали рассмотрим их действие на прямой рычаг (рис. III.4, а). Сила Q от механизированного привода действует на левый конец рычага на расстоянии li от оси качания 0. Сила Q поворачивает рычаг на оси около точки О, а правый конец рычага зажимает обрабатываемую деталь с силой W, находящейся на расстоянии / от точки 0. Вследствие различия плеч h и / рычага, а также учитывая потери на трение на его оси при повороте, следует, что величины сил О и W будут различными. Реакцию на оси рычага обозначим через iV. От силы N возникает сила трения Nfo, действующая навстречу вращению рычага. 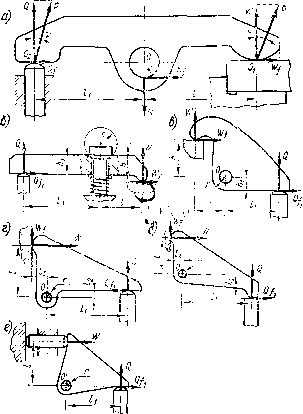 Рис. 1II.4. Схемы действия сил в рычажных прихватах приспособления Для определения силы N напишем уравнение равновесия рычага относительно точки Oi без учета силы трения: но или [0] [1] [2] [3] [4] [ 5 ] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] 0.0088 |